
基于RSS 辅助的多平台时差定位方法
2020-12-18 04:45刘安斐窦晓晶
数据采集与处理 2020年6期
刘安斐,丁 阳,窦晓晶,高 嵩
(1.北京卫星导航中心,北京,100094;2.海格神舟通信有限公司,北京,100000)
引 言
在无线电监测系统应用中,相比于基于到达角度定位(Angle of arrival,AOA)等传统无源定位技术,到达时差定位(Time difference of arrival,TDOA)具有精度高、稳定性强、系统实现复杂度低、易组网和对环境要求低等优点,非常适用于无人机载平台,而利用多架低成本无人机构成多站无源定位系统,可有效改善地面干扰测向系统在市区和其他复杂环境中多径、非视距传播条件下测向精度急剧恶化等问题。目前,国内外对基于TDOA 的无源定位技术及其应用有深入而广泛的研究,但相关技术创新多集中于定位解算算法的优化和定位精度影响因素分析及提升研究[1‑4],系统应用也多讨论的是一定布站条件下的系统性能评估与验证,采用多移动站TDOA 进行干扰查找的应用较少[5‑10]。然而,根据多站TDOA 的定位原理和不同布站阵型对定位精度影响分析结论,在实际应用时,布站应尽量保证目标源在站点的包围圈内,才能获得较好的定位精度[11]。在利用无人机集群进行干扰源查找定位时,主要包括无人机集群从起飞点飞达最终布站区域(包含目标源的布站区)、时差测量及定位解算等3 个过程。其中,时差测量及信息传输时延和定位计算过程耗时均为秒级,因此,如何使无人机群从起飞点快速飞至目标布站区对缩短定位时间至关重要。
本文针对TDOA 定位前无人机群快速抵达最佳定位区域,进而实现有效定位的问题,提出了一种基于接收信号强度(Received signal strength, RSS)定位辅助信息的TDOA 定位方法,利用RSS 定位来引导无人机群完成TDOA 有效布阵区域抵达,无需进行其它额外硬件部署,只需添加RSS 定位解算和相应的无人机群目标位置生成代码,即可实现无人机群从起飞点至目标布站区域的快速抵达。
1 多平台TDOA
TDOA 无源定位通过测量无线电信号到达不同监测节点的时间差,来对无线电信号发射源进行定位。其定位原理示意如图1 所示。根据平面解析几何原理,至两定点的距离差绝对值为常数的动点轨迹是双曲线,当有两个监测节点均收到目标信号时,由到达时间差即可推算出到达两个监测节点的距离差值。该距离差可以确定一对双曲线,而目标源即在该双曲线上。若3 个或以上监测节点均能监测到该目标源发射的信号,则可确定多条双曲线,求解多条双曲线的交点即可得到目标源的位置坐标。以一个主节点和n(n≥3)个辅节点构成的三维无源TDOA 系统为例,设目标位置为(x,y,z)T,各节点空间位置为 (xj,yj,zj)T,j=0,1,2,…,n,j=0 表示主节点,j=1,2,…,n表示辅节点,rj表示目标与节点j之间的距离,Δri表示目标到节点i与目标到主节点之间的距离差,多平台时差定位模型表示为

图1 TDOA 定位原理示意图Fig.1 Schematic diagram of TDOA positioning principle

式中,c为电波传播速度,Δti为目标信号到达节点i(ti)与到达主节点(t0)的时间差测量值,则该关系式确定的非线性方程组的最终解在几何空间中即代表目标位置(x,y,z)T。 对应的定位精度分析表明多平台TDOA 定位的最终定位精度与节点位置误差(无人机自机定位误差)、时差测量精度和目标辐射源与各监测节点的几何位置有关[12‑16]。
当目标与传感器间的距离相对于传感器间的基线长度很大时,在目标所在区域中双曲位置线将趋于平行,噪声或者很小的测量误差都会产生相当大的定位误差。图2 为不同布站阵型下的定位误差可视化分布图,从图2 中可以看出:被定目标越靠近几何中心,布站形式对定位精度的影响越小,越往外发散,定位精度越差。
2 RSS 定位原理
目前被广泛应用于室内定位的RSS 定位技术[17],是依据信号强度随传播距离的变化规律实现定位的一类方法,其定位核心是根据多个参考节点接收同一目标源的信号强度来实现目标位置的确定。传统的基于几何测量法的RSS 定位技术[18‑19]首先需要测出各监测节点接收到目标的信号强度RSS,然后根据信号传输衰减模型逆向推算出各节点与目标间的传播距离d,进而估算待定位信号源的相对地理位置。由于该方法是在已知信号衰减模型参数的前提下进行目标函数的确立和求解的,但干扰源定位应用中,用户无法获知目标源的发射功率Pt,需采用差圆定位法[20]来消除参数Pt,具体原理如下。

图2 不同布站形式下的定位误差分布图Fig.2 Location error distribution under different station placements
假设两个参考节点收到目标发出的信号强度分别为Pri和Prj,信号强度衰减在自由空间环境中的经验模型为

则有


当W=1 时,(x,y)的轨迹是以两参考节点为端点的线段的中垂线。当W≠1 时,(x,y)的轨迹是一个圆,如图3 所示,圆心坐标为

半径为

实际应用时,通常设定阈值θ(θ为一固定常数),当|Pri-Prj| ≤θ时,用两参考节点的中垂线方程代替圆方程。即


图3 差圆法示意图Fig.3 Schematic diagram of difference circle method
依据式(7),一对RSS 差决定一个方程式,因此通常需要k(k≥4)个监测节点的RSS 数据才能通过方程组求解得到干扰源的位置坐标。
3 基于RSS 的多平台TDOA 时差定位
3.1 基于RSS 定位的TDOA 时差定位流程
基于RSS 的多平台TDOA 时差定位的核心思想为:在TDOA 定位前,先进行RSS 辅助定位和阵型移动,使无人机定位阵型的最佳定位区域尽快覆盖干扰源较大概率分布区域。根据前述TDOA 定位原理分析可知,TDOA 参考基站阵型的不同,其定位性能存在差异,且每种阵型对应的最佳定位区域也不同,图4 分别给出了5 节点情况下4 种不同阵型的最佳定位区域示意图。其中,最佳定位区域定义为定位区域中,定位精度高于阵型内平均定位精度的区域,即图4 中的红色区域。
RSS 定位解算原理与TDOA 类似,且RSS 定位结果仅作为快速引导无人机群到达TDOA 有效定位区域的依据,其结果对最终定位精度无影响,系统最终定位精度取决于TDOA 的定位精度。基于RSS 定位的TDOA 时差定位流程如图5 所示。为简化无人机群协同飞行的复杂性,可事先通过仿真选取对应TDOA 定位性能较优的无人机群阵型。在进行首次RSS 定位前,辅机升空时即以主机为中心进行阵型分布,悬停接收干扰信号完成首次RSS 定位,并依据其定位结果保持阵型进行飞行编队位置整体平移,反复多次,直到RSS 定位结果处于阵型对应的TDOA 有效定位区域内之后,启动时差测量,完成TDOA 定位解算,获取干扰源精确定位结果。

图4 不同阵型下5 节点TDOA 最佳定位区域示意Fig.4 The best positioning region of five nodes TDOA under different positioning formations

图5 基于RSS 定位的TDOA 时差定位流程Fig.5 Positioning flow of TDOA based on RSS
3.2 基于RSS 的多平台TDOA 时差定位场景
以5 节点无人机群的RSS+TDOA 定位为例,对其基于爪型阵分布的定位场景的具体分析过程如下:
(1)定位任务开始时,真实目标位置在定位阵型之外;此时启动RSS 定位,获取目标位置概率位置。首次RSS 定位后,因为法线方向发散的原因,定位区域误差较大,目标可能概率区域较大(图6)。
(2)无人机群按照图7 所示(图7 中为简化示意只画了3 个节点),快速平移至目标区域附近,平移的目标是使该阵型对应的最佳定位区域的中心与RSS 定位估计点重合,在进行无人机群航迹控制时,可根据固定阵型的最佳定位区域中心与阵型中的各节点位置关系和RSS 定位估计点位置坐标推算出各节点目标位置坐标。

图6 RSS 初步定位效果示意Fig.6 Schematic description of RSS initial posi‑tioning effect

图7 移动过程示意Fig.7 Schematic description of movement process
(3)无人机群第1 次整体移动完毕后,再次启动RSS 定位,可能结果如图8 所示,由于阵型已覆盖RSS 概率定位区域,取得较为可信的概率区域(如果依旧在阵型外面,可重复步骤(2)的移动过程,直到图8 中类似结果)。
(4)经过两次RSS 定位后,可获取较高精度,若未达到支撑干扰排查需要的定位精度,则需要再次微调阵型,使其达到图9 所示效果。此时,TDOA 最佳定位区域已覆盖RSS 定位概率区域,可保证TDOA 定位达到理论上的较高精度。
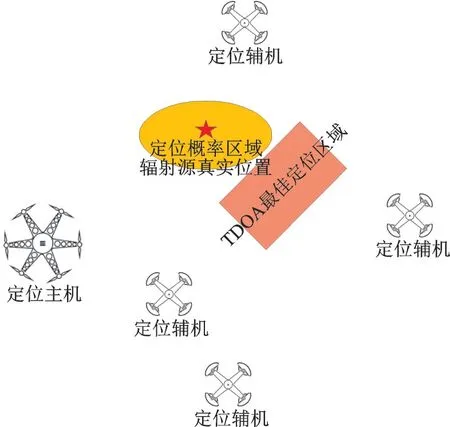
图8 再次RSS 定位结果效果示意Fig.8 Schematic result of the second RSS
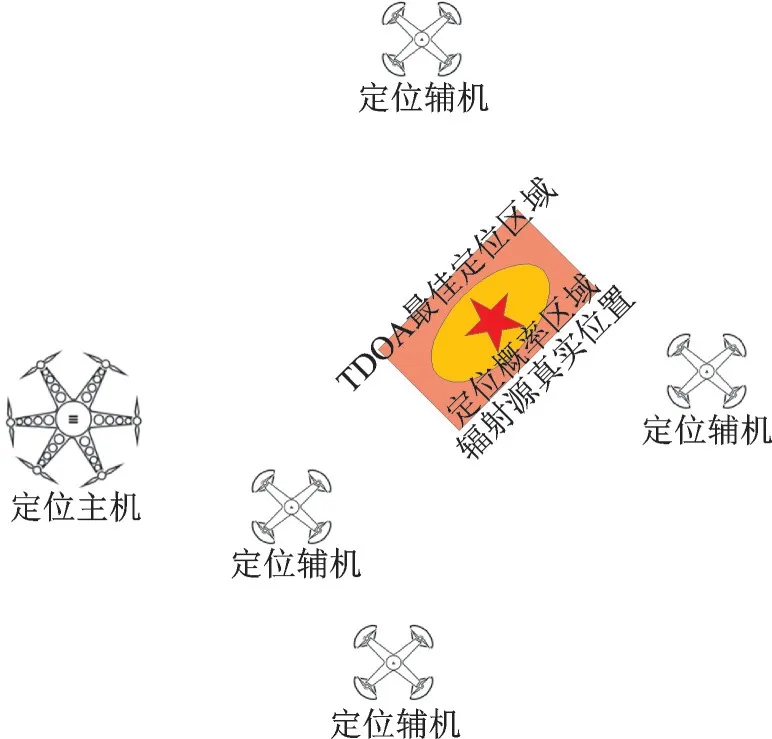
图9 RSS 最终定位结果示意Fig.9 The final location result of RSS
(5)RSS 定位达到目标区域后,启动TDOA 定位。若单次TDOA 定位结果未进入当前阵型的最佳定位区域,可仿照步骤(2)—(4),对阵型位置进行平移微调,使阵型对应的最佳定位区域的中心与TDOA 初次定位估计点重合。通常,最多经过1 次移动,即可保证TDOA 定位结果进入理论上的最佳定位区域,从而保证最终定位精度。
4 RSS+TDOA 定位可行性及效能分析
4.1 RSS+TDOA 定位可行性论证
4.1.1 RSS 定位结果辅助TDOA 定位可行性理论分析
作为TDOA 定位前置步骤,RSS 定位的解算是基于到达强度的精确测量进行的,但在实际应用环境中,信号强度的测量误差往往较大。电平估计误差与信噪比的关系计算方法为(以下公式中的电平与信噪比均已换算至分贝单位下而非十进制)

对于检测门限(信噪比5 dB)附近的信号,误差可达1.6 dB,对应的相对误差范围约为-31% ~+45%。根据自由空间传播模型(式(2)),换算到距离比例上的测量相对误差范围约为-17% ~由此带来的最大定位解算误差相对参考点距离(相对误差)约为40%(几何精度(Geometric dilution of precision, GDOP)值取2)。若无人机阵型基线取1 000 m,则接收强度测量误差引起的RSS 定位误差最大可达数百米;如果RSS 的定位产生最大误差时,RSS 定位估计结果仍落在TDOA 的最佳定位区域范围内,才可保证依据RSS 定位结果进行无人机群整体平移后能够到达其TDOA 的有效定位区域,即可证明RSS 定位能够满足TDOA 定位最佳区域抵达的引导需求。
4.1.2 RSS 定位结果辅助TDOA 定位可行性仿真验证
为验证利用RSS 定位结果辅助无人机群逼近完成TDOA 有效定位方法的可行性,本文对特定阵型下的RSS 定位和TDOA 定位进行仿真,主要针对两个问题:
(1)通过优选阵型下的TDOA 仿真,验证TDOA 有效定位区域是否覆盖RSS 定位最大误差范围,以确认在RSS 最大定位误差情况下,RSS 定位仍可引导无人机群平移至TDOA 有效定位区实施最终定位。
(2)通过RSS 仿真分析,要使后续TDOA 的解算精度达到系统定位要求,所需RSS 定位的最大次数。
本文首先在干扰源发射功率、自机定位误差、时间同步误差等TDOA 定位精度影响因素均取典型值(10 W,5 m,20 ns)的情况下,进行无人机群阵型和节点个数优选仿真,并在选定最佳阵型5 点爪型阵(图10)的基础上,分别针对各TDOA 定位独立误差源(基线长度、干扰强度、时间同步误差和节点自机定位精度)对精度的影响趋势以及不同目标源发射功率下的RSS 定位精度进行了仿真,TDOA 仿真最佳阵型如图11 所示。其中,为简化计算,仿真时,RSS 解算采用等间隔离散点搜索法。干扰信号到达功率通过信源功率和链路衰减计算得到,叠加噪声后再进行能量检测,其中叠加噪声采用最大导航信号带宽(20 MHz)的热噪声(-92 dBm),信号频率取典型导航信号频率1.5 GHz。其他仿真参数如表1。
根据TDOA 定位各独立误差源的影响仿真分析可得:在定位精度要求30 m(最终可步行查找干扰源)的应用背景下,定位基线为1 000 m 时,定位达标区域分布最合理,且区域内最大定位误差最小。干扰在可被正常检测的功率取值范围内,其发射功率对定位误差影响可忽略。自机定位误差和时间同步误差均与定位精度呈类正比例线性关系,与达标区域面积则近似反比例关系。基线长度为1 000 m,干扰强度为10 W,自机定位误差5 m 和时间同步误差20 ns 采用市场常规指标下TDOA 定位精度分布图如图12 所示。
由图12 可以看出:TDOA 有效定位区域覆盖半径至少在600 m,和RSS 最大定位误差处于同一数量级,且完全可容纳RSS 最大定位误差,因此可验证:RSS 定位能够满足TDOA 有效区域抵达的引导需求。
针对验证的第2 个问题,采用在定位精度最恶劣(发射功率最低Pt=1 W)的情况进行定位次数分析。图13 是以无人机群阵型中心为原点,X,Y轴方向均为[-10 km,10 km]范围内的多次RSS 定位误差的均值结果。图13 中,绿色标注的点构成的圆形区域即为以原点为圆心的半径为10 km 的圆边缘。根据绿色标注点的定位误差值可知,以无人机群为中心10 km 半径范围内的RSS 定位精度约在4 km 以内,即若在距离干扰源10 km 范围内做第1 次RSS 定位,定位精度将控制在4 km 以内。当无人机群抵近第1 次RSS 定位估算点进行第2 次RSS 定位前,干扰源应在距离无人机群中心4 km范围内,对应为图13 中黄色标注点围成的圆形区域。同前,根据黄色点对应定位误差值分布情况可知,当距离干扰源4 km 内做第2 次RSS 定位后,定位精度将控制在180 m 以内,对应的是图13 中橙色区域,可以看出此时进行第3 次RSS 定位,定位精度可达几十米量级。

图10 TDOA 调整定位示意Fig.10 TDOA adjustment positioning schematic

表1 RSS/TDOA 定位仿真参数Table 1 Simulation parameters of RSS/TDOA
上述仿真时信号的测量误差来源方面仅考虑了20 MHz 的热噪声,而实际应用中干扰信号强度的测量可能面临更多的误差因素,从上述仿真结果分析,以距离干扰源10 km 范围开始进行RSS 定位,3 次RSS之后可达数十米量级,即便考虑实际误差因素引起的强度测量误差,RSS 定位后误差也可控制在数百米量级,符合TDOA 定位最佳区域抵达要求。若系统作用半径按5 km 估算,TDOA 定位启动前,3 次RSS 定位足够满足后续要求,因此,RSS 定位最大次数为3。
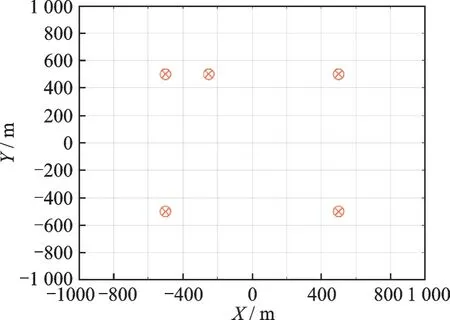
图11 TDOA 仿真最佳阵型(5 点爪形阵)Fig.11 TDOA simulation under the best forma‑tion(5‑point claw array)

图12 TDOA 定位精度分布图Fig.12 TDOA positioning accuracy distribution diagram

图13 干扰源发射功率为1 W 时RSS 定位精度分布图Fig.13 Positioning accuracy distribution of RSS with the transmitting power 1 W
然而实际情况下,即使通过RSS 辅助定位和阵型移动,使无人机定位阵型的最佳定位区域覆盖了RSS 的定位结果,对应的初次TDOA 定位结果仍有一定概率不能进入阵型最佳定位区域,此时则需要对阵型进行微调后实施二次定位(如图10),来保证TDOA 的最终定位精度。
4.2 定位性能比较
利用RSS 定位信息进行TDOA 定位辅助是TDOA 定位时无人机群从起飞点快速飞至目标布站区的针对性解决方案,该方法对系统指标的贡献主要体现在缩短定位时间上,因此,对于RSS+TDOA 定位方法的效能评估主要是对定位时间进行考察和评估。
4.2.1 RSS+TDOA 定位时间估算
典型的无先验信息的空基干扰源定位(如图5)主要包括主无人机升空查找(包括调整高度和旋转)、主无人机移动逼近、辅机升空并移动组成阵型、无人机群RSS 定位和无人机群TDOA 定位等5 个步骤。若系统覆盖半径为5 km,无人机升空高度范围为[200 m,500 m],无人机最大垂直移动速度为5 m/s,最大水平移动速度为20 m/s,系统定位各步骤所耗时间具体分析如下:
(1) 主无人机升空查找
主无人机升空查找时,每个高度停留需要旋转360°,对东、西、南、北、东南、西北等8 个方向进行检测查找。若升空高度以100 m 为步进,则最多需要停留4 次(h=200/300/400/500 m),高度调整时间需要40~100 s,而无人机姿态调整时间不超过2 s,则每个高度下旋转和停留检测时间不超过16 s。因此,主无人机升空查找步骤最短耗时为40+16=56 s,最长耗时为100+16×4=164 s,典型时间取两者平均为110 s。
(2) 主无人机移动逼近
主无人机移动逼近过程无需悬停,是一个连续逼近过程。由于无人机飞行路线不是理想的直线飞行路线,主机利用比幅测向引导飞行时,移动逼近的路线最差情况下可近似为一个直径为系统覆盖半径R的半圆弧(如图14),对应移动逼近最长路径约为7.9 km,因此,主无人机移动逼近步骤最短耗时5 s(初始位置即为最佳位置,移动一点立即触发停止),最长耗时约为7 900/20=395 s,典型时间取两者平均为200 s。
(3) 辅机移动并组成阵型
若阵型各节点距离中心最远约500 m,则辅机移动并组成阵型的最短耗时为200/5+500/20=65 s,最长耗时为500/5+5 000/20=350 s,典型时间取两者平均207 s。

图14 主无人机移动逼近路线示意Fig.14 Schematic moving route of the main UAV
(4) 无人机群RSS 定位
RSS 定位本身采集信号所需时间并不多(采集+解算可控制在5 s 内),该过程主要时间消耗在两次RSS 之间的阵型平移上。考虑到RSS 定位次数最多为3 次,移动距离总共最大为5 km。因此,无人机群RSS 定位的最短耗时为5 s,最长耗时为5×3+5 000/20=265 s,典型时间取两者平均为135 s。
(5) 无人机群TDOA 定位
同RSS 定位类似,TDOA 定位本身采集信号和定位解算所耗时间可控制在5 s 内,不考虑微调情况(概率很低),无人机群TDOA 定位的耗时为5 s。

表2 定位过程耗时统计Table 2 Time consuming statistics of positioning process
综上所述,在定位流程完全自动化的前提下,系统定位全流程最短耗时136 s,最长耗时1 179 s,典型耗时约为657 s,系统最长定位时间可控制在无人机一个续航周期(20 min)以内,典型值可以做到11 min 左右。
4.2.2 其他干扰查找方法比较分析
目前,无线电测向交叉定位是电子侦察领域实际应用最为广泛的一种方法,本文以该方法为参照进行效能对比。以干扰源位于发现地点5 km 范围内为前提,从4.1.2 节的TDOA 仿真结果来看,本文方法在目标到达TDOA 阵型有效定位区内启动TDOA 定位,可确保20 min 内市场常规参数下的TDOA定位误差控制在50 m 以内(见图12,在仿真基础上考虑其他实际误差因素),再依据其定位结果进行步行逼近查找的时间可控制在10 min 内,从而保证整个干扰查找过程在30 min 内完成。而采用地面移动监测车(大作用范围下交叉测向的常用方法)进行多点交叉测向+步行逼近的方法,按驱车1 次行进2 km 再测向,采用二次测向结果交叉定位的模式,单前后两次移动监测车天线升降并完成稳定测向和驱车耗时至少需20 min,若测向精度取目前较优水平2°,5 km 范围内对应测向定位误差可达170 m,采用上述相同的手持逼近手段进行人工查找的时间将为TDOA 方法的3 倍,且在移动车进行交叉测向的过程中,一般至少需要3~5 次测向,再加上行进过程中路径和有效测向点的选择会耗费大量的时间,通常一次外出测向需耗时1~2 h,甚至几天,若干扰具有随机出现且持续时间较短的特点,还会出现查找失败的可能。因此,在可自动化实现的前提下,本文方法优势明显。
5 结束语
本文针对利用多站TDOA 无源定位进行干扰查找时,如何使多个移动站快速逼近目标并有效进行TDOA 定位等问题,采用RSS 定位结果辅助引导目标最佳定位区快速抵达的方法,解决了干扰查找实际应用中因目标距离受扰点位置不明,干扰查找系统如何迅速逼近、实施有效定位,进而缩短整体定位时间的问题。文中描述了基于RSS 的多平台TDOA 时差定位流程和关键定位场景,并以基于轻型无人机平台的空基定位系统实施干扰查找为应用背景,对该方法的定位可行性及其对系统定位时间的贡献进行了详细分析论证。结果表明在定位流程自动化实施顺利的前提下,系统整个定位流程的最长耗时可控制在无人机一个续航周期(20 min)内。该方法和对应实现流程可为目前无线电监测和定位系统实现及其干扰查找应用提供一种有效思路和实践试探。
猜你喜欢
中国畜禽种业(2022年8期)2022-09-17
小哥白尼(神奇星球)(2020年5期)2021-01-18
全球定位系统(2020年1期)2020-03-31
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
电子制作(2017年10期)2017-04-18
中国交通信息化(2016年5期)2016-06-06
冰雪运动(2016年5期)2016-04-16
