一种靶载嵌入式遥测监控装置设计
2020-12-18 02:08吴春光何四华刘成浩
无线电工程 2020年1期
吴春光,何四华,刘成浩
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
0 引言
在反舰类武器系统考核试验中,经常会在被攻击的靶船上安装如目标特性实现、船体姿态测量和中靶数据采集等必要的设备,该类设备统称为靶载设备[1]。靶载设备多数工作在无人值守的环境下,特别是在海上环境恶劣、保障时间不确定的情况下,如何实时获取设备工作状态尤为重要。同时在延长设备电源工作时间或恢复设备初始工作状态时,要求靶载设备必须具备远程遥控开关机功能,以达到灵活控制设备工作状态的目的。
遥测监控类装备在国内已有广泛应用,其中在船舶主机遥控[2-4]和移动机器人远程遥控[5-6]等方面应用较为广泛。卢超[7]利用GSM网络,采用2片单片机为控制核心,设计了一种多通道远程遥控开关,通过用户手机发出控制指令短信或者通过按键模块输入定时开关时间实现远程控制多组电器的通断。杨法红[8]等以超短波电台为通信介质,设计一种远程遥控开关机模块,实现了机场通信导航台站的全功能遥控和无人值守。杨伟宁[9]等利用短距离无线通信技术实现对气象站温度、湿度、压力和光照等环境信息的远程采集、监测。晏岱[10]采用无线数传作为通信媒介,PLC为核心,实现了对压路机基本操作的远程控制和工作参数的采集,提高系统的作业能力。可见,遥测监测功能在多数行业均有应用[11-13],而海上试验环境下的设计应用却较为鲜见。本文针对某型靶载设备的使用要求,通过有线专用网络和卫星通信的工作模式,设计了一套海上靶载嵌入式遥测监控设备,主要用于采集靶载设备正常工作时的电流、电压、环境温湿度等信息,并通过对电源的控制实现靶载设备远程遥控开机和关机。
1 系统设计
该装置根据不同功能需求采用模块化设计,主要由数据处理模块、数据传输模块、电流电压采集模块、温度湿度采集模块和电源开关模块组成,系统组成框图及流程图如图1和图2所示。

图1 遥测监控装置组成框图Fig.1 Telemetry monitoring device block diagram
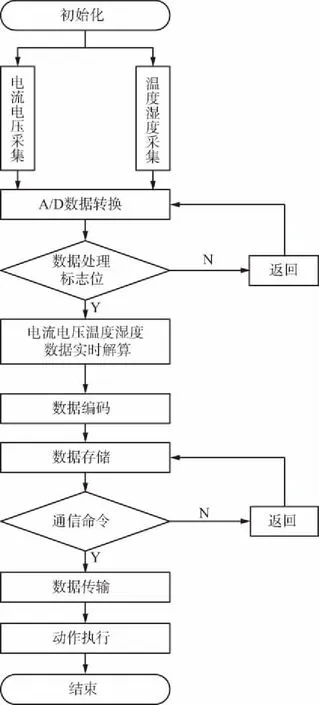
图2 系统工作流程框图Fig.2 System workflow diagram
系统具体工作流程为:
① 靶载设备通电(交流电或直流电)并开始正常工作后,地面控制设备与靶载遥测监控设备采用请求应答的工作方式。地面控制设备首先向遥测监控设备发送一个请求上传数据的命令,遥控监测设备收到指令后向地面指挥中心回送数据,地面控制设备开始对靶载设备工作状态进行远程监控状态。
② 电流电压采集模块以及温湿度采集模块实时采集被测靶载设备的电流、电压以及环境的温湿度数据,经数模转换后,将模拟量转换为数字量,数据处理模块对电流值、电压以及温湿度值进行处理。
③ 模拟量转换为数字量结束后,数据处理标志位置位,数据处理模块对电流电压采集模块和温度采集模块的测量信息进行实时解算,靶载设备所需电流电压事前已经标定好,数据处理模块实时与标定值进行对比,计算是否超出标定误差范围,若超出标定误差范围,则将相应数据标志位置位。
④ 数据处理系统实时监测电源开关状态以及供电电源(交流电或直流电),并将相应数据标志位置位。
⑤ 数据处理系统根据数据通信协议进行编码,对编码后的数据进行实时存储,最后通过数据传输模块将数据发送给地面控制设备。
⑥ 地面控制设备在必要时对靶载设备进行开机或关机控制[14],数据处理模块在收到远程遥控指令后,通过电源开关模块对被测靶载设备供电电源执行电源开或电源关动作,实现远程遥控功能。汪洋[15]在无人中继的靶标远程测控系统中分析了靶载端与地面端相距300 km时,能够实现对靶标的遥控和靶载任务数据的实时传输。
2 模块单元设计
2.1 数据处理单元设计
设计采用8位的ATmega64作为数据处理单元的控制核心。Atmega64是一款高性能、高灵活性、低功耗的8位AVR单片机,其带有8路10位高精度的A/D,64 kByte的系统内可编程Flash,2 kByte EEPROM,4 kByte SRAM,UART,SPI接口等,完全可以满足设计要求,且成本低、可靠性高。本文设计的ATmega64芯片外围电路如图3所示。其中PA口为双向I/O 口,外接LED,用于显示串口和系统工作状态;PC口为双向I/O口,用于按键开关控制和继电器通断控制;PF口为ADC的模拟与数字输入端口,设计将PF口用于电流电压采集;PD口为复用端口,将PD端口用于串行时钟和串行数据、看门狗、串口输入输出;PE口为复用端口,将PE口用于另一个串口输入输出。
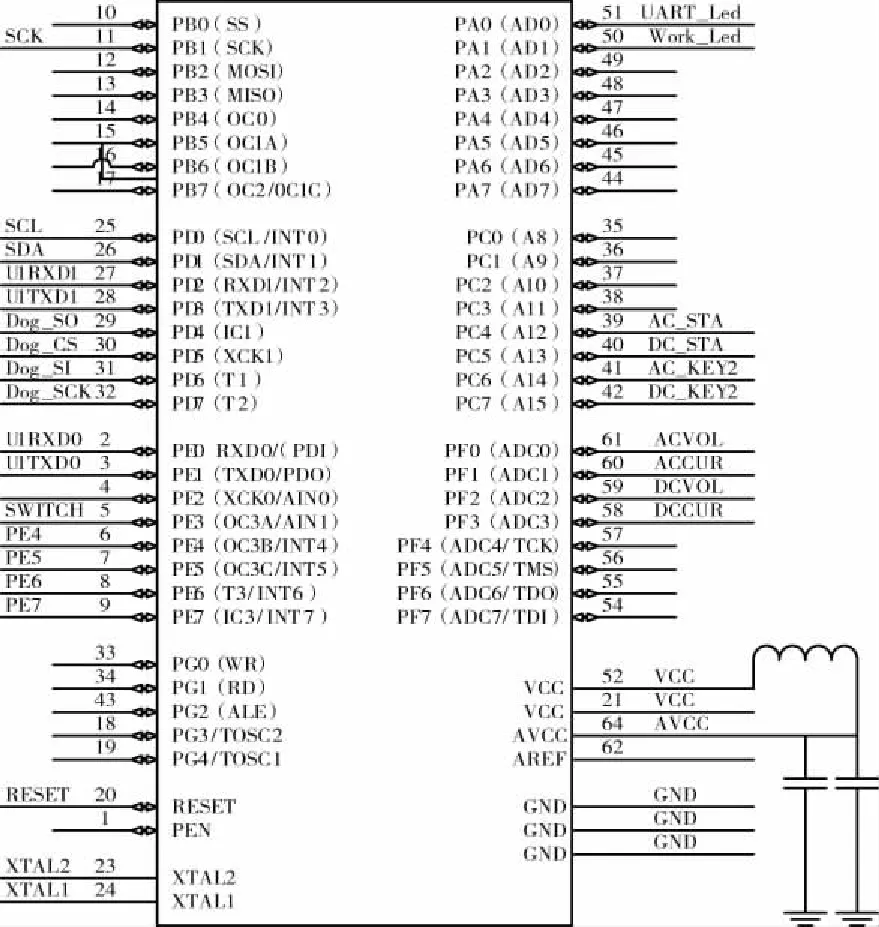
图3 ATmega64外围电路Fig.3 ATmega64 peripheral circuit
2.2 数据采集单元设计
2.2.1 电流电压采集电路
采用JCE-VP闭环型霍尔电压传感器作为电压测量元件。JCE-VP外接原边电阻,将电压信号转换为电流信号,JCE-VP再隔离测量。传感器额定测量电流范围为:±5 mA,额定电压输出为2.5±0.625 V,基准电压为2.5 V。交流额定测量电压为220 V,设计选用62 000精密电阻,则额定测量电流为3.55 mA,因此额定电压输出为2.5±0.444 V;直流额定测量电压为24 V,设计选用5 620精密电阻,则额定测量电流为4.27 mA,因此额定电压输出为2.5±0.534 V。交流、直流电压测量电路如图4(a),图4(b)所示。
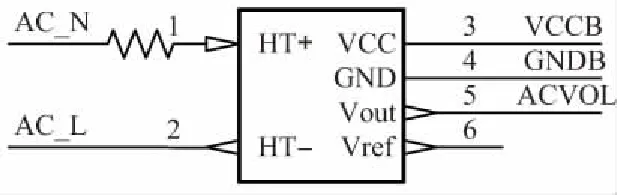
(a)交流电压测量电路
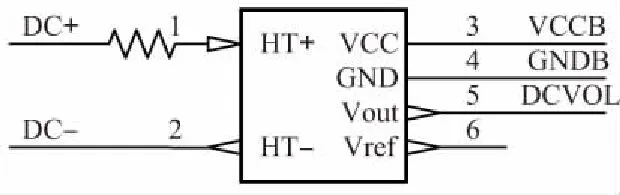
(b)直流电压测量电路
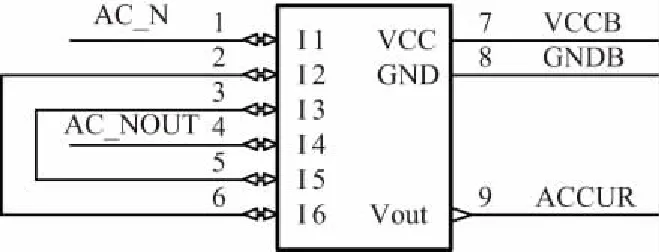
(c)交流电流测量电路
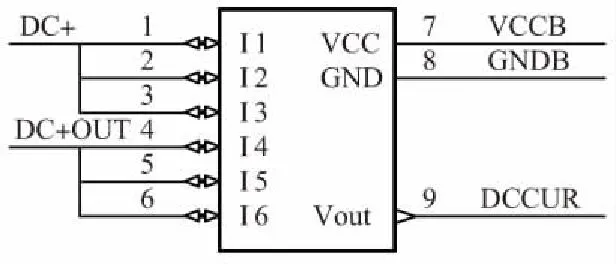
(d)直流电流测量电路
采用JCE-TSNP多量程闭环型电流传感器作为电流测量元件。传感器额定测量电流范围为6 A,额定电压输出为2.5±0.625 V,基准电压为2.5 V。交流最大测量电流为2 A,直流最大测量电流为6 A。交流、直流电流测量电路如图4(c)、图4(d)所示。
2.2.2 温度湿度采集电路
采用德州仪器的HDC1080作为温湿度采集传感器,HDC1080是一款具有集成温度传感器的数字湿度传感器,能够以超低功耗提供出色的测量精度,测量范围为-40~+125℃,具有14位的测量分辨率,该器件可直接向AVR单片机传输数字信号,采用了单总线的数据传输,便于AVR处理及控制。温湿度采集电路如图5所示。

图5 温湿度采集电路Fig.5 Temperature and humidity acquisition circuit
2.3 电源开关电路设计
采用继电器对电源进行开关控制,驱动芯片采用ULN2803,其具有电流增益高、工作电压高、温度范围宽、带载能力强等特点,单片机通过控制I/O的高低电平来控制继电器的通断。当单片机的I/O为高电平时,经过ULN2803,其变为低电平,继电器常开触点闭合;当I/O为低电平时,经过ULN2803,其变为高电平,继电器常开触点断开。电源开关驱动电路如图6所示。
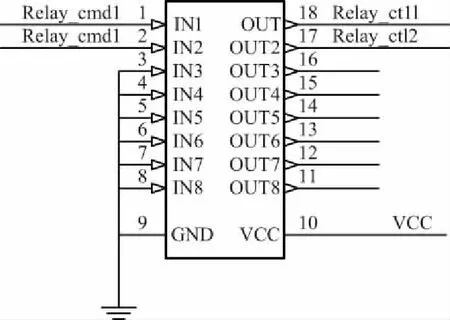
图6 电源开关驱动电路Fig.6 Power switch drive circuit
2.4 数据传输单元设计
遥测监控装置通过网络进行数据传输,系统通过网络将数据传送至卫通交换机,利用卫星通信与地面指挥中心进行数据通信。AVR单片机不具备网络传输接口,因此需要对数据传输接口进行转换,本设计中将AVR单片机串口转换为网络接口,采用ZLAN1003进行接口转换。ZLAN1003是一款功能强大的单芯片串口转TCP/IP芯片,支持TCP服务器、TCP客户端、UDP、UDP组播工作模式,内部集成了10/100 M快速以太网MAC和PHY接口、UART串口以及串口转TCP/IP所需的软件功能。
3 数据监测与控制
系统研制完成后,需要对系统进行性能指标检测,本文采用标准交直流电源对系统进行标校实验,分别选择靶载设备交流供电模式和直流供电模式,地面控制端读取系统电流电压值,并与标准交直流电源输出电流电压进行对比,验证系统检测结果的准确性,实验结果如表1、表2、表3和表4所示。
表1 交流电压测试数据
Tab.1 AC voltage measurements

序号输出值/V实测值/V误差/%1200.00200.420.212210.00210.810.393220.00220.460.214230.00230.750.335240.00240.690.29
表2 直流电压测试数据
Tab.2 DC voltage measurements

序号输出值/V实测值/V误差/%120.0020.050.25221.0021.170.81322.0022.130.25423.0023.260.59524.0024.090.39625.0025.160.64726.0026.200.77827.0027.150.56928.0028.321.14
表3 交流电流测试数据
Tab.3 AC current measurements
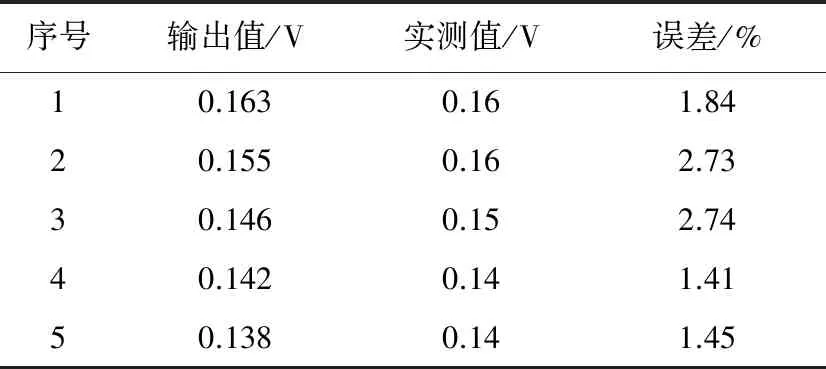
序号输出值/V实测值/V误差/%10.1630.161.8420.1550.162.7330.1460.152.7440.1420.141.4150.1380.141.45
表4 直流电流测试数据
Tab.4 DC current measurements
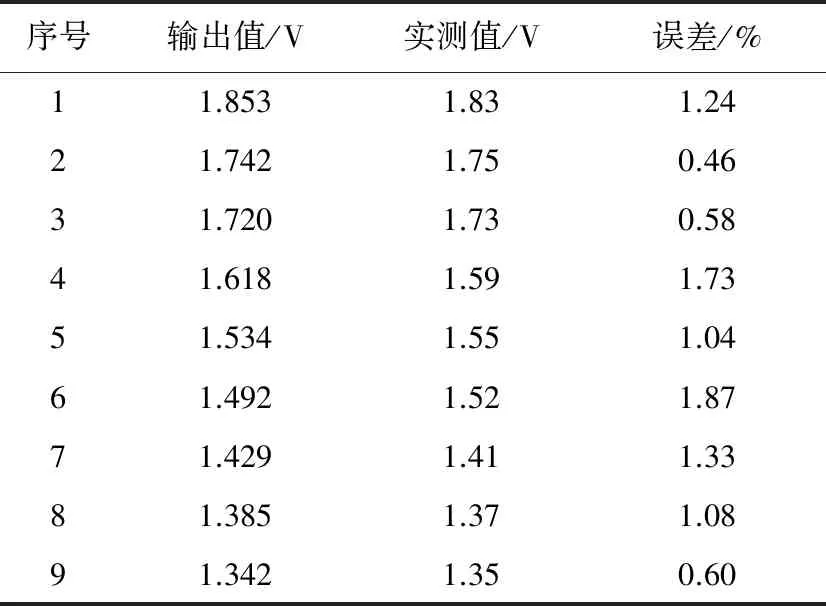
序号输出值/V实测值/V误差/%11.8531.831.2421.7421.750.4631.7201.730.5841.6181.591.7351.5341.551.0461.4921.521.8771.4291.411.3381.3851.371.0891.3421.350.60
从实验结果可知,电压测量最大误差为1.14%,电流测量最大误差为2.74%,电压测量结果误差比电流测量结果误差小,其主要原因为地面控制端数据结果只保留2位小数,而标准电源电流输出保留3位小数,引入误差;AVR单片机在进行数模采集过程中,单片机引脚处由于存在电磁干扰等因素,会引起采集到的数值存在波动,造成误差。
系统研制完成后,对系统进行了远程遥控开关控制实验测试。地面控制端对靶载设备进行远程开机关机指令下发,观察系统电源开关电路继电器接通断开情况以及设备是否根据指令正常开机和关机,实验结果表明,系统能够准确按照相应指令执行开机关机动作。
4 结束语
通过海上实测及应用,该装置易于安装、操控简便、工作稳定可靠、结构设计合理,实现了海上无人值守情况下靶载设备工作状态监测和控制能力,节省了操作过程中的人力物力,并有效提升了设备使用效率,具有成本低、操控性好和实用性强等优点,同时,基于该装置模块化设计的特点只需要进行稍加改进,便可应用于其它型号设备和多种参数的远程监控以及数据采集任务,具有较高的应用前景和推广价值[16-17]。
猜你喜欢
现代妇女(2022年5期)2022-05-25
英语文摘(2021年11期)2021-12-31
小学生优秀作文(低年级)(2021年11期)2021-12-06
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
语文世界(小学版)(2019年2期)2019-02-24
学生天地(2018年19期)2018-09-07
小天使·一年级语数英综合(2014年7期)2014-06-26