神经网络在航迹检测中的应用
2020-12-18 02:07:58谢廷尧吕宇宙
无线电工程 2020年1期
谢廷尧,姜 伟,吕宇宙,叶 舟
(上海航天电子通讯设备研究所,上海 201109)
0 引言
传统雷达航迹起始算法,主要有两大类:顺序处理算法和批处理算法。顺序处理算法以基于逻辑的方法和基于规则的方法为主[1-3]。顺序处理算法在运算复杂度和空间复制度上都很低,对于硬件资源较少的雷达数据处理组件比较友好。但是,顺序处理算法不适用于杂波较多的环境,对于地物杂波较重的低空目标航迹处理,无法做到在较低的虚警率请求下有较高的发现概率。
批处理算法[4-6]主要以霍夫变换和基于改进霍夫变换的算法为主[7-9]。批处理算法和顺序处理算法相比,批处理算法计算复杂度更高、空间复杂度也更高,但批处理算法能处理高密度杂波下的航迹起始任务,比顺序处理算法的鲁棒性好。
传统的航迹起始算法各有其优点,但在一些方面也有所欠缺。近年来,神经网络在各方面的应用[10-16]越来越广泛、成熟,如何将成熟的神经网络用于航迹处理中,将是人工智能与传统雷达航迹处理结合时研究的重点。本文将着重研究对于空域中是否存在航迹的判别。
传统航迹处理算法建立在数学模型基础上,性能的好坏与建立的数学模型、真实航迹以及环境的吻合程度有很大关系。本文提出的航迹判别算法利用真实数据训练航迹判别模型,所得出的航迹判别模型与真实的航迹以及环境吻合度很高,相对于传统航迹处理算法更加真实。
1 基础理论
航迹判别模型主要用到主成分分析(PCA)降维和卷积神经网络。
1.1 PCA降维
PCA是一种用于无监督学习的降维方法,使用一个新的坐标系去描述原来坐标系中的数据,舍弃原来坐标系中不重要的分量。被保留的分量称为主成分,因此,PCA实质上是一种坐标变换,如下所示:
Y=XUT,
(1)
式中,U表示原始的特征矩阵,每一行表示一个数据,每一列表示一个特征。这里假设X∈Rm×n是投影矩阵每一列表示一个投影的方向,转移矩阵U∈Rk×n,k表示降维后的特征个数,X∈Rm×n表示原始数据(降维前)。
PCA降维算法主要由去平均值、协方差矩阵计算、协方差矩阵特征值与特征向量计算、特征值排序与挑选、数据特征向量构建几个步骤构成。
通过PCA降维后,数据的绝大部分维度特征被保留,将方差基本为零的特征维度剔除,有利于后续的航迹判别。
1.2 卷积神经网络
航迹判别模型使用的卷积神经网络是图像处理和自然语言处理与神经网络结合的研究重点。卷积神经网络主要由输入层、卷积层、池化层、软分类层和输出层组成。相对于传统神经网络,卷积神经网络将卷积层加入传统神经网络的输入层和全连接层之间,通过卷积层,使传统神经网络的很多问题得以解决,例如网络模型参数较多、神经网络最大层数限制等。
卷积神经网络的卷积层通过限制隐含单元与输入单元的连接,使每个隐含单元只连接输入信号的一部分相邻区域,如图1所示。通过卷积层,数据的邻接关系将被卷积核提取。卷积层的主要作用是提取特征,通过卷积操作,将输入矩阵的特征提取成卷积特征矩阵。
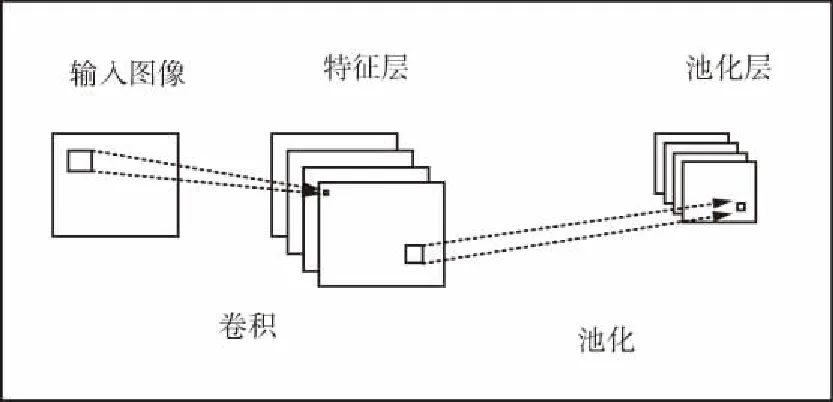
图1 卷积神经网络计算示意图Fig.1 Convolution neural network calculation diagram
1.3 交叉熵损失函数
在卷积神经网络提取出特征后,需要损失函数对提取出的特征进行判断。对于航迹判别模型,在特征识别阶段需要对提取出的特征经行分类,而交叉熵损失函数在特征分类上效果很好。
交叉熵损失函数结合归一化指数函数,可以构建利于神经网络梯度下降的凸函数。在逻辑回归问题中,通常使用均方误差函数作为损失函数,此时损失函数如式(2)所示(没有加入归一化指数函数):
(2)

实际输出在经过归一化指数函数之后如式(3)所示:
(3)
经指数归一化后的均方误差函数如式(4)所示:
(4)
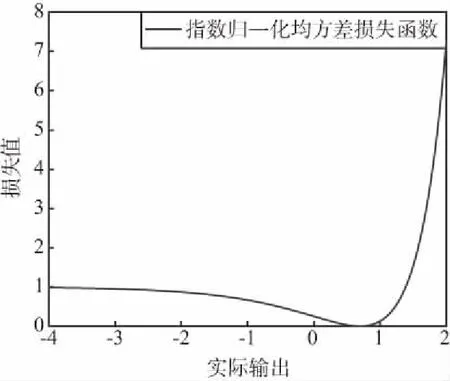
图2 经指数归一化后均方误差图Fig.2 Mean square error graph
而使用交叉熵损失函数,可以使损失函数为凸函数,从而能达到全局最优。交叉熵损失函数如式(5)所示:
(5)

本课题属于二分类问题,相应的交叉熵损失函数图形如图3所示。从图3中可以看出,交叉熵损失函数是凸函数,并且距离越大梯度也越大。所以交叉熵损失函数能使损失函数达到全局最优并且利于损失函数的优化。
通常在使用数据之前,会对输入数据做标准化处理:处理后的任意一个特征在数据集中所有样本上的均值为0、标准差为1。标准化处理输入数据使各个特征的分布相近,更有利于训练出有效的模型[17]。

图3 交叉熵损失函数示意图Fig.3 Schematic diagram of cross entropy loss function
1.4 Batch Normal
通常来说,数据标准化预处理对于浅层模型就足够有效了。随着模型训练的进行,当每层中参数更新时,靠近输出层的输出较难出现剧烈变化。但对于深层神经网络来说,即使输入数据已做标准化,训练中模型参数的更新依然很容易造成靠近输出层输出的剧烈变化。这种计算数值的不稳定性通常难以训练出有效的深度模型。
为解决这一问题,提出了批量归一化,即Batch Norml,在模型训练时,批量归一化利用小批量上的均值和标准差,不断调整神经网络中间输出,从而使得整个神经网络在各层的中间输出的数值更稳定。
2 模型构建
用于航迹判别的神经网络整体结构如图4所示。训练数据通过深度神经网络后的输出值同真实值(标签)对比,使用交叉熵损失函数计算损失值,再通过梯度反向传播来调整每一层的网络参数,达到训练目的。训练网络由PCA预处理模块、特征提取模块和分类决策模块组成。PCA模块对数据进行降维处理,使得输入数据具有相同的维度(由于输入雷达的点迹个位非定长,如果不进行降维处理,会导致输入神经网络的数据大小不一);特征提取模块由2层卷积层组成,用于提取雷达点迹的特征;决策模块由一个线性分类器组成,用于将提取到的特征进行分类,从而达到分类目的。
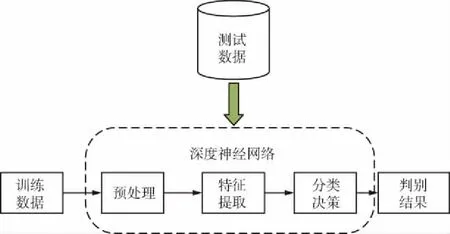
图4 航迹判别神经网络结构图Fig.4 Structure diagram of flight path discrimination neural network
2.1 数据结构
采用真实雷达数据进行训练与测试,部分数据(即网络输入数据的结构)如表1所示。每一行代表一个点,总的行数等于点的个数。对于每一个点,第1列表示目标距离,第2列表示目标相对雷达的方位角,第3列表示目标相对雷达俯仰角。
表1 雷达数据结构
Tab.1 Radar data structure
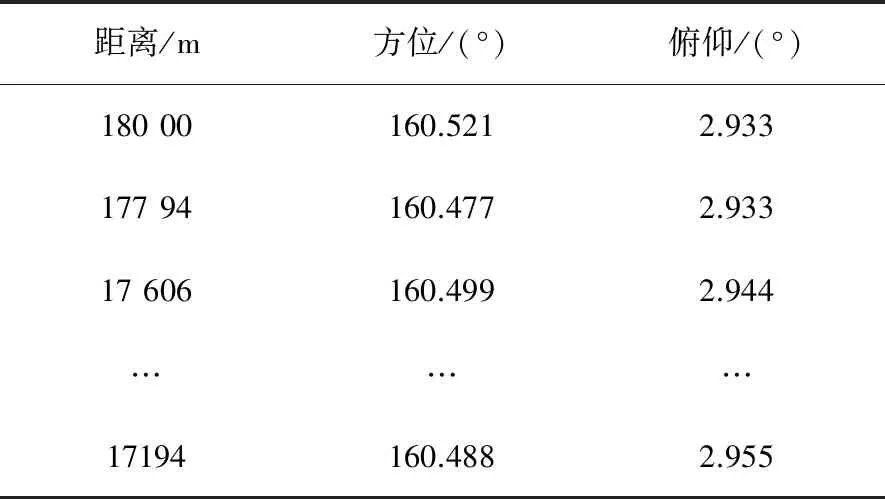
距离/m方位/(°)俯仰/(°)180 00160.5212.933177 94160.4772.93317 606160.4992.944………17194160.4882.955
训练用标签由0,1组成,“0”代表样本中不含航迹信息;“1”代表样本中含有航迹信息。总的样本数为339 053个,其中将30%的数据用于测试,70%的数据用于训练。
2.2 超参设置
神经网络的超参设置如表2所示,卷积层的主要超参有卷积层的输入通道数、输出通道数、卷积核大小、步长以及标准化,全连接层的主要超参有输入通道数和输出通道数。初始batchsize设置为128,学习率设置为0.01,在训练400次之后学习率设置为0.005,batchsize改为64。
表2 神经网络超参设置
Tab.2 Neural network hyperparameter settings
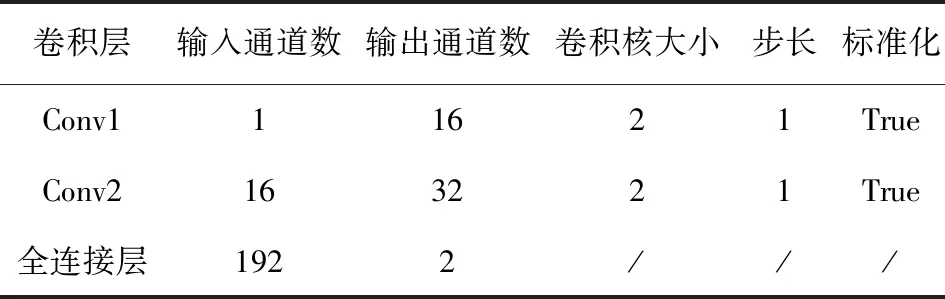
卷积层输入通道数输出通道数卷积核大小步长标准化Conv111621TrueConv2163221True全连接层1922///
2.3 结果分析
训练过程中,总共迭代1 200次,代价函数变化趋势如图5所示。从图5中可以看出,随着迭代次数增加,代价函数逐渐减小,并且减小幅度越来越小,组合基本趋于稳定并且收敛,表明模型的训练是有效的。
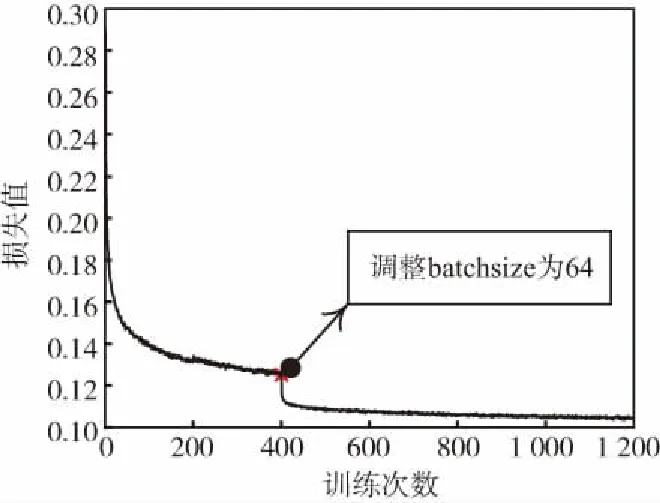
图5 代价函数变化趋势Fig.5 Variation trend of cost function
在测试阶段,其中30%(101 716个)测试样本在训练好的神经网络上的表现如表3所示。其中40 087个正样本(样本中存在航迹)被正确检测出37 551个,发现概率为93.673 7%;61 629个负样本(样本中不存在航迹)被错误判断2 347个,虚警率为4.099%。
表3 测试集测试结果
Tab.3 Test results of test set
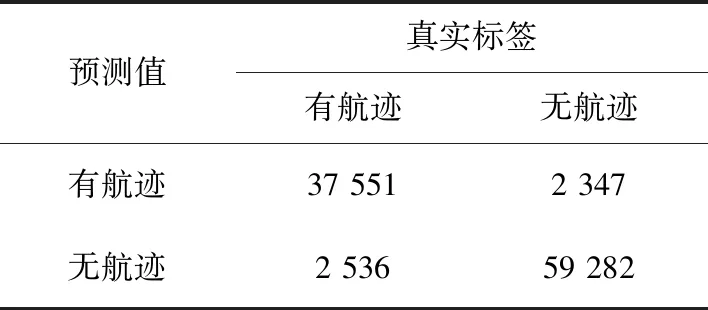
预测值真实标签有航迹无航迹有航迹37 5512 347无航迹2 53659 282
模型的鲁棒性对于模型十分重要,鲁棒性越好表明模型的可重复性越好,其随机的成分越低。通过将数据重排然后以相同的比例分配训练集、测试集再放入模型进行训练、测试,重复10次的结果如图6所示。从图6中可以看出,在10次重复的试验中,准确率基本稳定在95%,说明模型的鲁棒性很好,可以在实际工程中应用。
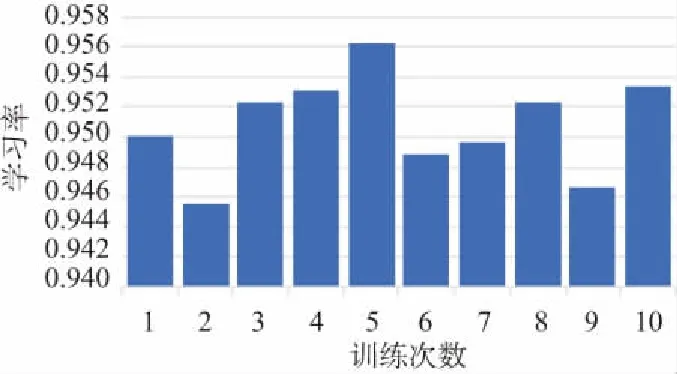
图6 模型鲁棒性测试结果Fig.6 Model robustness test results
3 结束语
由于雷达的作战场景多样化,针对不同的场景,用于雷达滤波的滤波器参数也将不同。神经网络使用真实场景数据训练的滤波器能自适应地匹配真实场景,能降低主观因素对于滤波器的影响。并且,针对不同的用途,可以结合目标与背景,训练专用的神经网络用于复杂环境下的航迹检测。
猜你喜欢
车主之友(2022年4期)2022-08-27 00:57:12
江西教育·职教版(2022年9期)2022-04-29 00:44:03
数学小灵通·3-4年级(2021年5期)2021-07-16 07:46:32
海峡姐妹(2019年12期)2020-01-14 03:24:40
青年歌声(2019年12期)2019-12-17 06:32:32
今日农业(2019年15期)2019-01-03 12:11:33
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
广西民族大学学报(自然科学版)(2015年3期)2015-12-07 00:56:05
舰船科学技术(2015年8期)2015-02-27 15:38:47