
三维激光扫描技术在隧道收敛监测中的应用
2020-12-17 11:45陶钧刘胜男
安徽建筑 2020年12期
陶钧,刘胜男
(1.常州市武进规划勘测设计院,江苏 常州 213159;2.江苏城乡建设职业学院,江苏 常州 213147)
1 引言
随着国民经济飞速发展以及城市化脚步的加快,我国城市轨道交通也在迅猛发展。城市轨道交通具有运输能力强、速度快、环保等优点,能极大地满足人们日益增长的出行需求[1]。但是城市轨道交通绝大部分修建在地面以下(人们俗称“地铁”),轨道交通事故也频繁发生,其安全性和稳定性成为了社会普遍关注的新问题。城市轨道变形监测作为保证其安全、稳定运营的一项工作显得十分重要[2]。
目前传统的变形监测方法主要运用GNSS、全站仪、水准仪等设备来监测一些关键点位的变化,不仅需要多名专业人员的配合,而且变形分析均有“以点代面”的局限性,不能全面细致地反映变形的过程与趋势。三维激光扫描技术能够克服传统监测方法的弊端,节省大量人工和时间成本,利用激光及时、准确和清晰地展现在轨道交通的变形情况,提高轨道交通变形监测的数据管理能力及数据处理效率,为监测单位、咨询单位、业主单位等轨道交通建设者服务,加快城市轨道交通的数字化、智慧化建设的进程。
2 项目情况
2.1 测区情况
某轨道交通35km至36km的区间,已经进入轨道安装和设备调试阶段,预计在2019年底进行试运行。地下轨道交通全部采用盾构方法进行施工,隧道内径设计值为7.700m,两端为两个地铁站,便于测量。同时轨道交通施工方仍然用常规方法进行整体收敛监测,其成果可用来与三维激光扫描的成果来进行比较。
2.2 监测周期与方法
从2019年5月10日至2019年8月30日,每隔十天测量一次,共测12期数据。
2.3 监测内容
对全线轨道线路进行整体收敛监测,测定隧道结构的各个方向的位置距离以及变化速度,进而分析主体结构的变形情况。
2.4 监测预警值
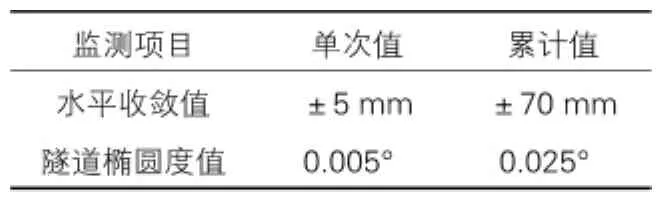
隧道结构沉降预警值
3 数据采集
3.1 控制网的建立
35km至36km的区间在施工建设阶段已经布设了10对(20个)CPⅢ控制点,并且保存完好,经事前复测,精度满足控制网的要求。为了保证获取高质量点云数据,在复测时又用靶标加密了11个控制点A0~A10,共同组成控制网。

图1 测区控制网示意图
3.2 数据采集参数设置
为了保证数据质量,整个扫描过程采用天宝TX8的二档扫描,30m处点间隔1mm。控制点到扫描目标距离控制在60m以内使用。
3.3 采集数据
架站静态扫描时采用的方法是把靶标架设在控制点上,扫描仪任意架站,每相邻的两站有相同的3个靶球作为同名点,扫描结束后,利用RealWorks数据处理软件,将控制点坐标加入到靶标中心上,采用空间坐标七参数转换关系,将测站点坐标地理化。
架站式扫描外业观测需用时2.5h,内业数据处理约8h。
4 数据处理
根据不同测量方式得到的测段点云数据中包括路过的行人、“飞点”噪声以及其他不可预知的事物出现,为了避免影响后期数据处理效率和成果精度,对数据进行预处理。
①点云拼接与抽稀:静态扫描时单一测站扫描无法获得完整的形态,因此需要多个测站来对其进行扫描,并将多测站的数据进行拼接。由于扫描的点云数据量巨大,为减轻后期数据处理,按3mm的间隔进行抽稀。
②点云地理化:利用CPⅢ控制点将整体点云进行坐标地理化,统一坐标系后可以与以往的监测资料做比较。
③点云分割:由于只需对隧道本身进行分析,而无需周围的多余点云,因此先删除周围多余数据,以减少数据量,加快数据处理速度。
④点云去噪:对分割后剩下的监测对象去除“飞点”等噪声,以提高成果精度。

图2 实验测段整体点云图
5 提取与分析
该测段中原有7个收敛监测环(见图3),建设方委托有资质的测绘中介服务机构运用测量机器人,自隧道贯通后就开始进行收敛监测,运用激光扫描技术,仍然对这7个监测环进行收敛监测分析,方便后续对比。
图3 七个监测环示意图
利用隧道内表面的点云数据,在每个环片的相同位置切断面,通过最小二乘法拟合椭圆,获取逐环管片水平收敛数据,计算通过圆心的长短半轴,利用公式计算得到每个环的椭圆度,将12期的水平直径和椭圆度的变化,逐期做差计算后统计成图4和图5。测量结果显示水平收敛值单次不超过5mm,累计也未达到70mm;椭圆度单次不超过0.002°,累计也未达到0.025°。同时段建设方委托有资质的测绘中介服务机构,运用测量机器人进行观测的结果(水平收敛值单次最大3.8mm,椭圆度单次最大0.0018°)与激光监测结果基本一致。
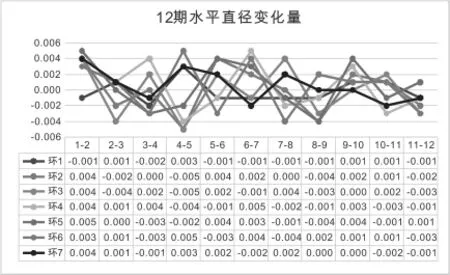
图4 七个监测环12期水平直径监测成果图

图5 七个监测环12期椭圆度监测成果图
6 结语
针对基于三维激光扫描的轨道交通整体收敛监测技术,以某地铁隧道项目为例,取得了预想的效果。
①基于三维激光扫描的变形监测技术,可以用于隧道整体收敛监测,还可以在限界监测、错台监测和病害识别等方面有良好的应用。
②通过数据证明三维激光扫描技术能够实现毫米级的变形监测,在效率、完整度、可复制性等方面具有优越性。
猜你喜欢
数学杂志(2022年5期)2022-12-02
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
铁道勘察(2021年6期)2021-12-27
建材发展导向(2021年12期)2021-07-22
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
全球定位系统(2021年1期)2021-03-26
新教育论坛(2019年14期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
