基于飞行计划集中处理的多航空器无冲突航迹规划
2020-12-15 09:22丁钰童杨运贵毛天时
科学技术与工程 2020年32期
向 征, 丁钰童, 杨运贵, 毛天时
(1.中国民用航空飞行学院空中交通管理学院, 广汉 618307; 2.民航空管飞行计划处理中心, 上海 201103)
2004年,欧盟实施的“单一欧洲天空空中交通管理计划”指出:在当前安全水平条件下,4D航迹规划能够有效地扩大航路容量,合理利用空域资源,从而将空中交通系统的服务责任战术性分隔转变到战略性管理[1]。2005年,美国提出“新一代航空运输系统”发展计划,也将4D航迹规划放在一个重中之重的地位,为此把4D航迹模型作为空管运行系统的基础,所有相关航迹均将被参与单位之间进行传递与共享,空管自动化系统将对4D航迹进行实时分析并做出调整[2]。2007年,在中国发布的《中国民航新一代空中交通管理系统发展总体框架》中,提出中国新一代空中交通管理系统,它不仅是一门核心技术,还是一项重要手段,基于4D航迹的运行更是它的主要内容[3]。
近年来,随着经济快速发展带动航空运输产业也不断壮大,空中交通量也随之增大,从而导致空域资源严重不足,原有的空中交通管理方式的局限性也逐渐暴露出来。因此,在飞行计划集中处理下,采用基于航迹运行模式在管理方式显得尤其必要。飞行计划的集中处理就是实现飞行计划的统一申请、统一生成、统一更新、解决飞行计划由各管制中心单独管理而造成的一致性和完整性问题,为区域提供准确统一的飞行计划数据服务[4]。基于航迹的运行是指在4D航迹的航路点上使用“控制到达时间”,即控制航空器通过特定航路点的“时间窗”。实现全国飞行计划集中处理,能够有效地缓解空域压力,基于4D航迹运行能够控制特定航路点的时间窗,来提高航空器的安全性和空域的利用率[5-6]。
航迹规划主要是解决航迹预测和冲突探测与解脱这两个问题。航迹预测方法主要分为两种:①基于飞机性能模型的方法;②基于数据挖掘的方法[7]。冲突探测解脱通常也有两种方式:①确定型冲突探测方法;②概率性冲突探测方法[8]。目前,国内航空器航迹规划研究不多。袁小凯等[9]提出一种利用遗传算法优化ADS-B飞行航迹的规划方法,为未来监视系统发展走向提供了经验;张琴等[10]采用一种离散动态系统的扰动分析方法,通过对系统输入参数引入虚扰动,获得航空器4D航迹规划;王建忠等[11]利用点融合进近技术对航空器进场4D航迹规划方法进行了研究,并通过仿真计算得出此方法可以有效提高终端区运行效率。
现以飞行计划集中处理为依托,根据飞行计划集中处理中共享的报文信息,从中获取的航空器飞行航线,将这些航线划分成若干航段,对航段交叉点进行冲突探测,然后运用调速法对航空器进行冲突解脱,根据航空器预定到达交叉点的时间,按照先到先服务的原则,对不满足安全间隔的航空器4D航迹进行重新规划,最后通过算例仿真验证其可行性。
1 飞行计划集中处理
1.1 飞行计划
飞行计划服务是空管面向航空用户服务的窗口,保障整个飞行过程安全、高效、有序和经济地运行,是用于计划飞行、飞行管制及导航目的的书面文件或电子数据文件,飞行计划文件中详细描述了飞机从起飞到着陆的整个飞行过程中的航路点、航迹、航向等信息[12]。
1.2 飞行计划集中处理概述
中国已在北京、上海设立了两个飞行计划集中处理中心,统一进行全国的飞行计划业务管理。在全国规定区域内进行的所有飞行活动,航空器营运人或其代理将领航计划报直接提交给指定电报地址,由两个飞行计划处理中心按照分工分别审核处理,再分发到负责提供空中交通管制服务的单位以及航空器营运人或其代理要求发送的单位。两个飞行计划集中处理中心协同处理机场离港航班、重复飞行计划和空中提交的飞行计划的有关报文,并且互为备份,接收、检查、处理、发送飞行计划,并跟踪飞行计划全过程[13]。
1.3 报文样例
飞行计划集中处理主要依托是飞行计划,处理即是对飞行计划进行预接受、再处理、再发送,下面给出2019年10月8日川航8379由成都双流飞至西安咸阳的领航计划报(FPL),如图1所示。由样例可知:本电报为加急报,发送时间是10月8日13:11,领航计划报主体报文包含:航空器识别标识川航8379,为定期航班,且采用仪表飞行规则;航空器为空客319(中型机);起飞机场为成都双流机场,起飞时间为10月8日6:05,飞行总时间为80 min,目的机场为西安咸阳机场,备降机场为银川贺兰山机场;航路相关信息。
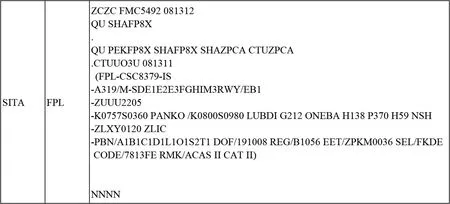
图1 领航计划报样例
2 航空器全飞行剖面混杂模型建立
飞行剖面指在三维立体坐标系中将飞行轨迹中的横向位置(飞行方向所指)去除,投影所得到的高度-航程二维图像生成的轨迹。航空器空中飞行过程主要分为推出、起飞、爬升、巡航、下降、着陆6个阶段,整个过程可描述为航空器物理状态的连续变化和航段与航段之间动态转变过程的总和。全飞行剖面混杂模型建立主要分两步完成。首先建立航空器航段转变模型,然后建立混杂系统模型。
(1)建立航空器航段转变模型,需给出一个Petri网定义,参照定义1。航空器从一个航段进入下一个航段的过程是离散的,但是航空器在每一个航段内的状态演变过程是连续的,这就使得航空器的运动模型是一类典型的混杂模型。
(2)建立混杂系统模型,在第一步的基础上,也需给出一个混杂Petri网定义,参照定义2。航空器全飞行剖面混杂模型,如图2所示。在航空器全飞行剖面混杂模型中,航空器初始时刻的飞行阶段的航段标识为
M0=(1,0,0,0,0,0,0,0,0)T
(1)
航空器状态为
S0=(W0,0,H0)T
(2)
式中:W0表示航空器的起飞重量;H0表示起飞机场所处的标高。

t1、t2…表示航空器变迁激发时所处位置的时间;q1、q2…表示各飞行航段地标识
定义1Petri网Net=(P,R,Pw,Pf,M)。其中:Net表示航段转变模型;P表示飞行航段总的集合,且P={q1,q2,…,qn},n表示航段个数;R表示飞行状态参数(如速度、高度)的变化点;Pw表示航路连接关系;Pf表示航路点连接关系;M表示航段标识。
定义2混杂Petri网Nhp=(Net,S,E,F)。其中:Nhp表示航空器运行状态的模型;S表示Petri网Net在航段标识M下航空器的运行状态;E表示Petri网Net在航段标识M下航空器的动态变化过程;F表示变迁激发完成特征函数。
S=(W,L,H)
(3)
式(3)中:W表示为航空器的重量;L表示为航程距离;H表示航空器到达指定高度时的垂直距离。
E=(V,A)
(4)
式(4)中:V表示航空器在航段转移点的当前速度;A表示航空器本身的加速度。
在上文所述的基础下,为了能够精确描述航空器的动态过程,给出变迁时间t的使用条件为∀q∈*t,若M(q)>0,则变迁ti使能并开始激发。其中,q表示飞行航段。假设激发积累所用时间为T,变迁激发所形成的行为特征变化为
E′=[V′(ti),A′(ti)]
(5)
式(5)中:

(6)
航空器运动状态变化为
S′=[W′,L′,H′]
(7)
式(7)中:航空器重量W为
(8)
航空器航程距离L为
(9)
航空器所处高度H为
(10)
式中:φ(t)、vgs(t)、vh(t)分别表示飞机燃油消耗率、地速和上升率(或下降率)。
航段激发完成特征函数F决定了激发变迁积累所用时间T,如果F满足条件要求,那么变迁激发完成结束,此时航空器激发演变状态为M′,航段标识M′的取值为
(11)
否则,飞行时间需要向后延长,此时需令:tN=t+T,重新迭代计算航空器运行过程的离散型状态与连续型状态参数。
3 无冲突航迹规划
3.1 航迹预测方法
采用的航迹预测方法是基于前文所述的全飞行剖面混杂模型,将航空器飞行航线根据不同的飞行剖面划分成若干个航段,再对各个航段进行航迹预测,然后利用混杂模型将各个飞行阶段进行转换连接,最后整合航空器整个飞行过程的航迹预测。具体流程,如图3所示。
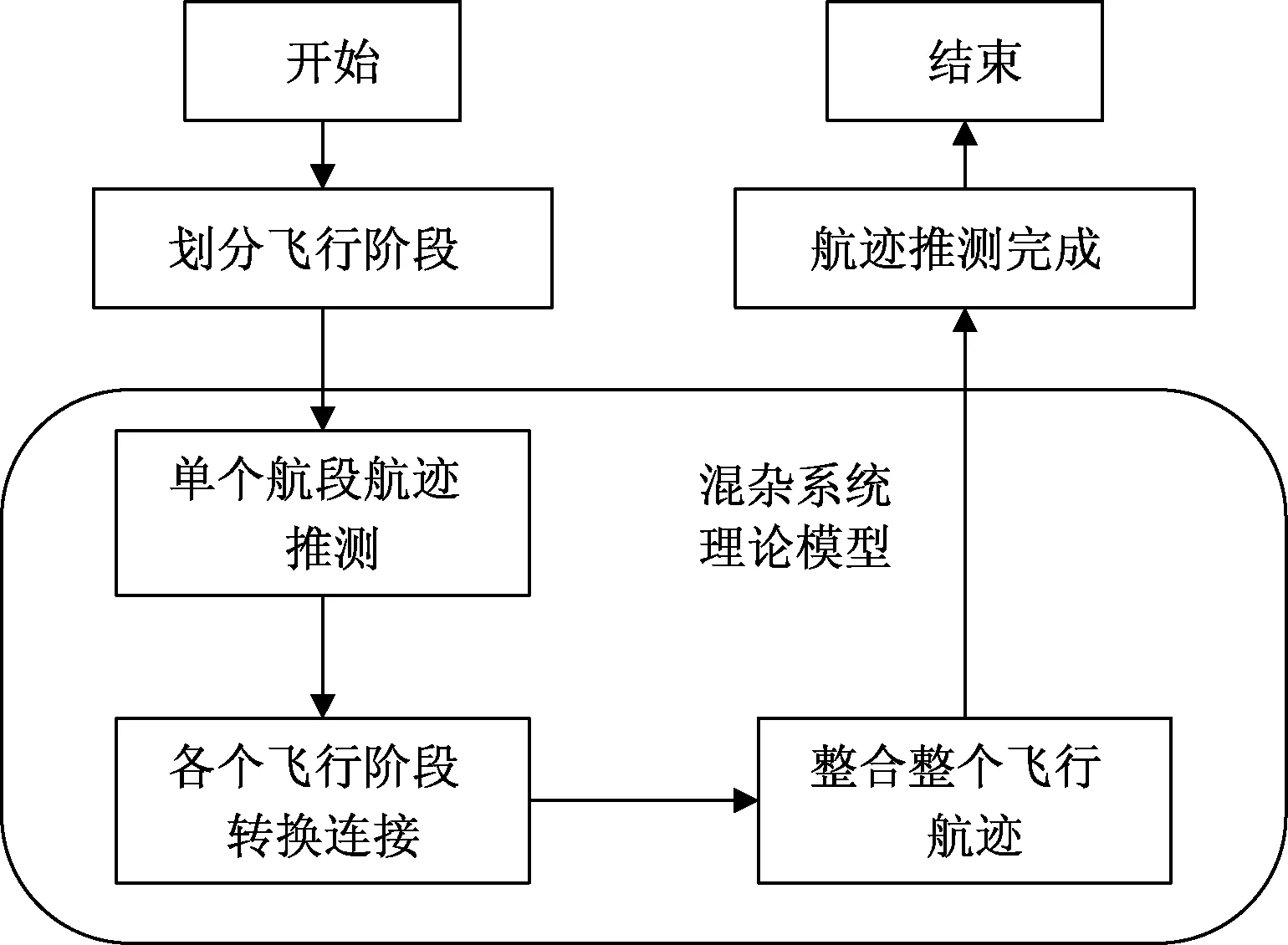
图3 航迹预测示意图
3.2 冲突探测方法
航迹冲突探测是空管自动化系统冲突探测中的一部分。当空中两架或两架以上航空器间不满足各自之间安全间隔要求时,它们就会出现冲突情况,因此,在航空器起飞前需要对航迹进行冲突探测。
目前,根据探测结果的不同,冲突探测方法大致可归为2类,分别是:①确定型冲突探测方法;②概率性冲突探测方法。确定型冲突探测方法是根据航空器当前航迹(如位置、速度等),不考虑其他因素影响,预测未来航迹并判断是否发生冲突[14]。概率性冲突探测方法考虑航空器受到雷达定位、风、导航、飞行员人为因素等影响,根据航迹预测的期望值和误差分布,计算每两架航空器未来发生冲突的概率[15]。确定型冲突探测方法较为简单,但应用效果极好;概率型冲突探测方法普适性较高,但计算量极大,效率极低。综上所述,采用确定型冲突探测方法中的相对运动方法,对航空器冲突进行探测预判。
首先,根据飞行计划集中处理得到各个航空器的飞行计划,飞行计划中包含了每架班次的航行路线,将航线根据航向变化划分成诸多航段,各个航段都定义一个安全区域,即宽度为最小水平安全间隔,长度为航段长度的长方形区域。然后,对航空器航迹进行交叉判断,探测不同的航迹之间是否存在冲突。最后,若交叉点存在冲突,则对交叉点范围内的航路点进行冲突探测。
以图4为例,通过调节速度来避免飞行冲突。假设两个航空器在同一高度层上飞行,将航空器b的安全距离(即圆形区域)投影到a的航向上,当与航空器的a的安全距离相切时,此时投影与x轴的夹角分别是α和β,规定夹角处于α和β之间时,航空器存在冲突。航空器a和航空器b的速度分别为va和vb;航空器a和b的相对夹角为λ;航空器航向角为θ;航迹角为φ;航空器之间的航向差为ε;O为航段交叉点。
γ=arcsin(S/D),α=λ-γ,β=λ+γ
(12)
式(12)中:S为最小水平安全间隔;D为航空器之间的距离。
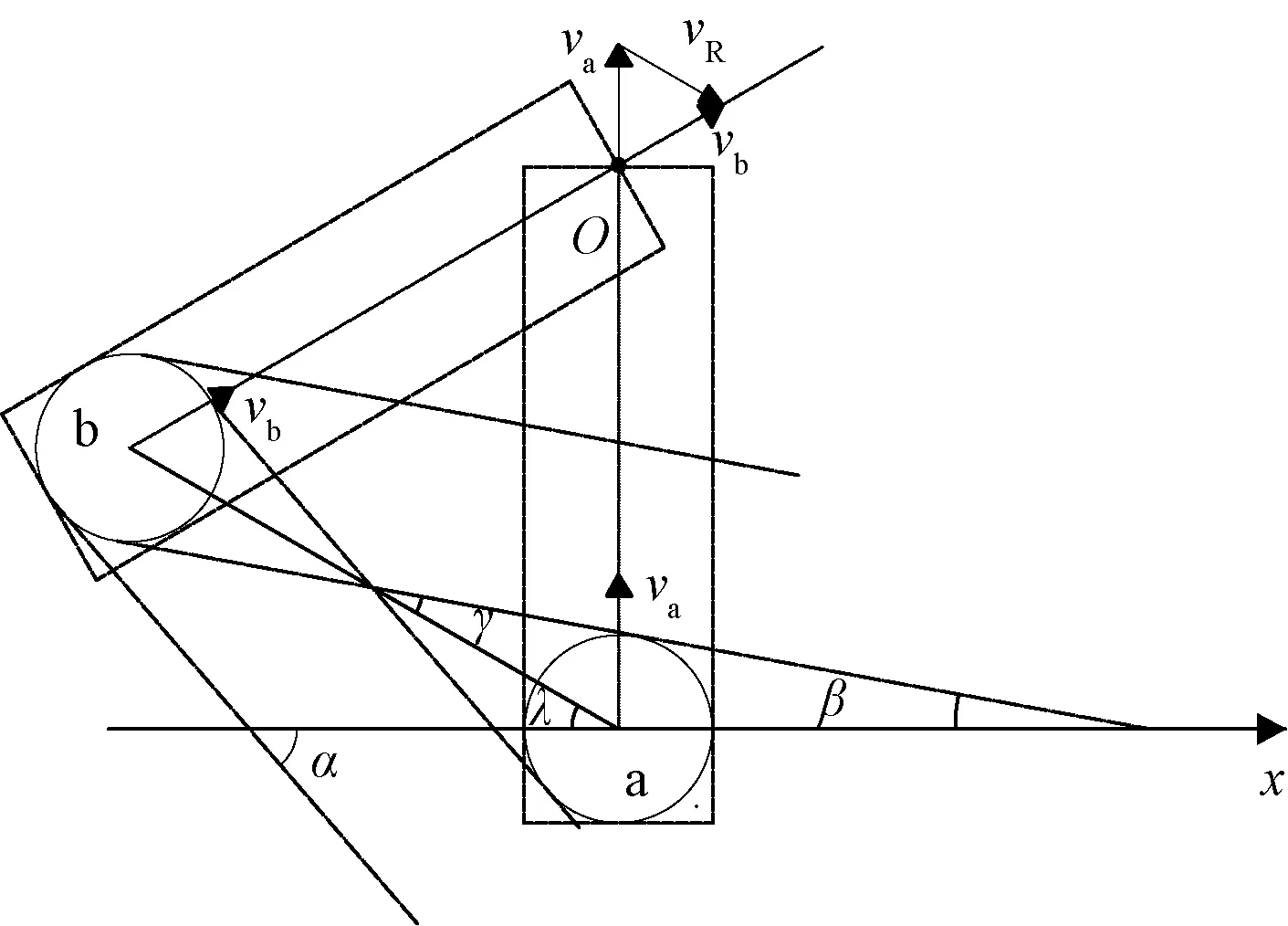
图4 交叉点冲突示意图
调速法就是改变飞行速度的数值大小,即保持航向角θ和航迹角φ保持不变,从而达到冲突解脱。如图4所示,若通过调节航空器b的速度来避让航空器a的飞行冲突,方法主要有以下两种。
(1)航空器b计划在a的后面通过交叉点,vb数值必然要减小且必须满足:
(13)
(2)航空器b计划在a的前面通过交叉点,vb数值必然要增大且必须满足:
(14)
上述调速法尤为重要的是必须满足航空器飞行性能的要求,即在飞机性能允许的范围内调整速度的大小,且如果Δv满足要求,那么Δv越小越好。
3.3 航迹规划方法
航迹规划方法是建立在航迹预测与冲突解脱的基础上进行的,主要采用调整航空器的速度来规避交叉点冲突,换言之,调整速度就是为了控制时间,航迹规划主要要采取的是控制航空器到达时刻,保证航空器能高效、安全地运行。航迹规划流程,如图5所示。

图5 航迹规划流程
4 算例仿真
4.1 航迹预测算例
以2019年10月8日川航8379航班的飞行计划为参考,讨论航空器起飞爬升阶段的航迹预测。参考图1的FPL报文并结合相关进离场程序可得到航空器飞行路线如下:ZUUU→CTU→OMGUS→JTG→PANKO→LUBDI→OMEBA→NSH→ZS→ZLXY,航线全长大约650 km。4D航迹输入信息:机型为A319,起飞重量约为60 t,巡航高度为10 100 m,离场程序为“JTG-01D”,起飞方式采用减推力起飞。
取仿真步长Δt=10 s,得到航空器爬升状态的水平航迹预测图(图6)和航空器爬升状态垂直航迹预测图(图7)。

图6 航空器爬升状态的水平航迹预测图
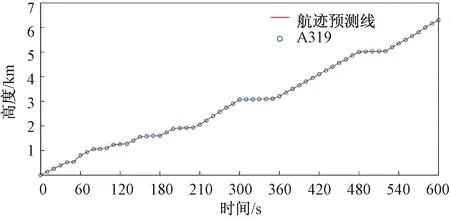
图7 航空器爬升状态垂直航迹预测图
4.2 冲突解脱算例
以航路A和W为例,截取交叉点附近航段进行冲突状况分析,参照图4。输入相关信息如下:航空器a和b的速度均为600 km/h,飞行速度限制为500~800 km/h,航空器之间最小水平安全间隔为10 km;λ=50°,D=80 km,ε=70°,γ=6°,通过上文算法,计算所得结果如表1所示。由计算结果可知:α=44°<θ=55°<β=56°,航空器a和b之间存在冲突,需要进行冲突解脱(速度调配)。调配策略如下。
(1)如果只对航空器a进行速度调配,则速度增大至625 km/h,即航空器a较b先过冲突点,从而达到冲突解脱。
(2)如果只对航空器b进行速度调配,则速度增大至696 km/h,即航空器b较a先过冲突点,从而达到冲突解脱。

表1 调速法的计算结果
4.3 无冲突航迹规划算例
结合前文所述的航迹预测与冲突解脱,同时考虑实际操作过程中的操作不稳定性,采用调整速度与进入航段入口的时刻协调对航空器无冲突航迹进行规划,具体操作方案如图8所示。
基于前文冲突解脱的算例基础下进行无冲突航迹规划。输入的相关信息如下:航空器a机型为A319,航空器b机型为A320,A319的初始重量为60 t、速度为600 km/h,且在航路A上飞行,A320的初始重量为65 t、速度为600 km/h,且在航路W上飞行,该两架航空器在同一高度上飞行。取仿真步长Δt=15 s,根据冲突探测结果,预计两航空器大约300 s在航路交叉点O附近发生冲突。
航迹规划调整如下:若仅调整A320的速度来避免冲突,则将A320在此航段中的飞行速度增大到696 km/h,即推迟了A319到达冲突点O附近的时间为75 s。经过分析调整后,A320能够先于A319,大约在375 s时能够安全通过冲突点区域,从而完成了冲突解脱。规划前后的对比如图9所示。
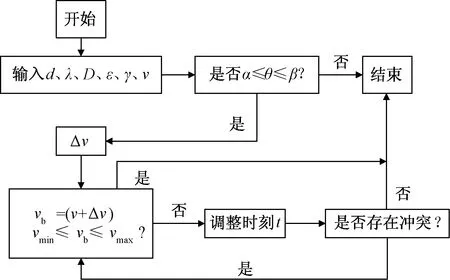
图8 航迹规划调整方案
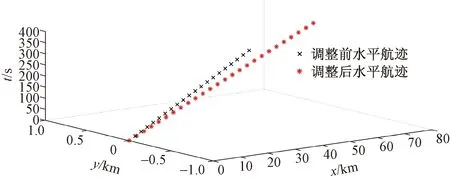
图9 A320航迹规划前后对比
5 结论
研究了在基于飞行计划集中处理下的航空器航迹规划,利用飞行计划以及航空器动态行为的混杂模型从航迹预测、冲突探测与解脱和航迹规划方法三个方面对航空器无冲突4D航迹规划进行了讨论,进一步提高了航空器航迹预测的精度。算例表明,基于飞行计划集中处理下的航空器无冲突航迹规划方法能够实时有效地解决飞行冲突,合理地给出规划方案,保证空中交通安全高效地运行,为未来优化空中交通流量管理措施奠定基础。
猜你喜欢
西华大学学报(自然科学版)(2022年2期)2022-03-17
计算机应用与软件(2021年6期)2021-06-21
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
航空工程进展(2019年5期)2019-11-05
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
大社会(2016年5期)2016-05-04