
核岛支架安装车升降臂机液耦合动力学建模
2020-12-14 08:58刘志双李科军施发永代四飞张富榕
液压与气动 2020年12期
刘志双, 李科军, 施发永, 苏 杰, 代四飞, 张富榕
(1.中国核工业二三建设有限公司, 北京 101300; 2.中南林业科技大学, 湖南 长沙 410000)
引言
在核电站核岛建设过程中,大量支架(50~300 kg)需要从室内地面搬运到墙顶或墙壁指定的预埋板位置进行焊接安装。传统利用脚手架安装支架的工作方式,将很多时间耗费在脚手架搭建和人工搬运支架上,劳动强度大,作业效率低。且支架进行定位安装时,需作业人员抬起支架对准预埋板上的划线位置进行焊接,当支架重量小时,容易调整位姿,可以保证支架定位精度;但当支架重量大时,难以调整位姿,无法控制支架定位精度。焊接时,焊渣、火星直接掉落在下方托举支架作业人员身上,容易引发安全事故。因此,可以实现支架精准搬运、定位和安装的支架安装车应运而生[1],该设备主要由下车总成、回转机构、升降臂、伸缩臂、飞臂和夹具等组成。其中,升降臂起垂直升降支架作用,其动力学性能对支架定位精度等工作性能参数有很大影响[2]。目前,国内外学者对剪叉式升降台和曲臂式高空作业车的运动学[3-4]、动力学[5]、稳定性[6-7]及其力学性能[8-10]进行了较为深入的研究,但对双四边形连杆机构的研究文献较少,且现有研究大多数基于理论方法,将液压缸驱动简化为活塞杆的理想运动驱动[3,6],没有考虑机械系统与液压系统的耦合效应。多领域建模软件AMESim为机液耦合系统提供了工程设计和仿真分析平台,本研究利用AMESim建立支架安装车升降臂工作过程机液耦合动力学模型,模拟分析升降臂起升过程中油缸的压力响应和双平行四连杆机构的动力学特性。
1 升降臂结构组成与工作原理
图1所示为升降臂的结构组成,从图中可以看出,通过铰点A,B,C,D,连杆1、连杆2分别和转台、铰支座1铰接构成下平行四边形连杆机构;通过铰点E,F,G,H,连杆3、连杆4分别和铰支座1、铰支座2铰接构成上平行四边形连杆机构,两平行四边形连杆机构上下对称布置;通过铰点M,N,中间连杆分别和连杆1、连杆3铰接。升降油缸分别和转台和连杆1铰接,当升降油缸活塞杆伸出缸筒时,连杆1绕着铰点B逆时针转动,转动过程中连杆1通过中间连杆驱动连杆3顺时针方向转动,当中间连杆长度以及与连杆1、连杆2的铰接点位置设计合理时,连杆3和连杆1的转动速度大小基本相等,方向相反。此时,与铰支座1铰接的伸缩臂等机构将与铰支座2一起垂直上升,这有利于支架的姿态调整,以便支架的定位焊接。
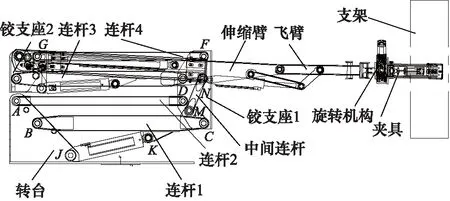
图1 升降臂结构组成和工作原理
2 升降臂机液耦合动力学建模
2.1 升降臂机械系统建模
AMESim的平面机构库是AMESim标准机械库的扩展,包含运动副、刚体杆件、终端约束、力及力矩转换器等建模单元。根据升降臂的结构组成和工作特点,对升降臂进行建模时主要用到刚体杆件、转动铰、移动铰和终端约束4种建模单元。刚体杆件用于模拟连杆和铰支座;转动铰用于模拟连杆与连杆、连杆与铰支座之间的铰接;移动铰作为连接机械系统和液压系统的桥梁,用于模拟油缸缸筒和活塞杆的相对运动;终端约束用来模拟升降臂和转台的铰接位置。
1) 刚体杆件动力学建模
如图2所示,把体坐标系固定在刚体杆件的重心上,杆件上任何一点(第i个点)位置可以用体坐标系原点坐标(xG,yG)和体坐标系相对绝对坐标系的旋转角度θG来表示,可以得到如下关系式:
(1)

(2)
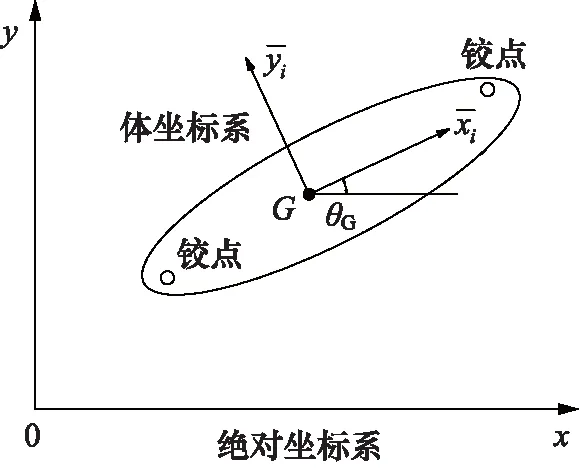
图2 刚体杆件简图

式(2)可以简化为:
(3)
杆件的动力学平衡方程为:
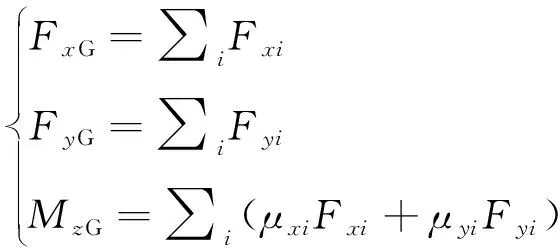
(4)
式中,Fxi,Fyi表示第i个节点x,y轴方向上的力,FxG,FyG,MzG表示质心上x,y轴方向上力及通过质心绕z轴的转动力矩。
2) 转动铰动力学建模
如图3所示,两刚体杆件通过转动铰连接,将体坐标系分别固定在两杆件上。两刚体杆件在转动铰铰接处端口2和端口1沿x,y轴的作用力分别为:
(5)
式中,kx,ky为铰接处x,y轴方向的接触刚度系数;bx,by分别为铰接处x,y轴方向的运动黏性阻尼系数;xa2,ya2,vx2,vy2分别为刚体杆件端口2在x,y轴方向的位移和速度;xa1,ya1,vx1,vy1分别为刚体杆件端口1在x,y轴方向的位移和速度。
转动铰铰接处转矩计算如下:
(6)
式中,T1,T2分别为转动铰铰接处端口1,2的转矩;kz为铰接处扭转刚度系数;bz为铰接处转动黏性阻尼系数;θ1,θ2,ω1,ω2分别为端口1,2的转动角度和角速度。
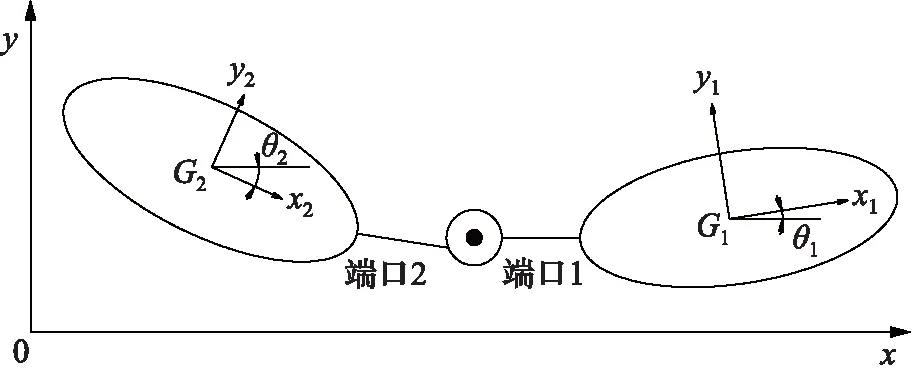
图3 转动铰简图
3) 移动铰动力学建模
如图4所示,两刚体杆件通过移动副连接,将体坐标系分别固定在两杆件上。通过计算两端口的几何约束和运动约束关系,可以求得油缸的压力,而油缸的高压液压油又驱动两刚体杆件发生相对运动,完成执行机构的作业动作,其驱动力大小为油缸两腔液压油有效作用力之差。
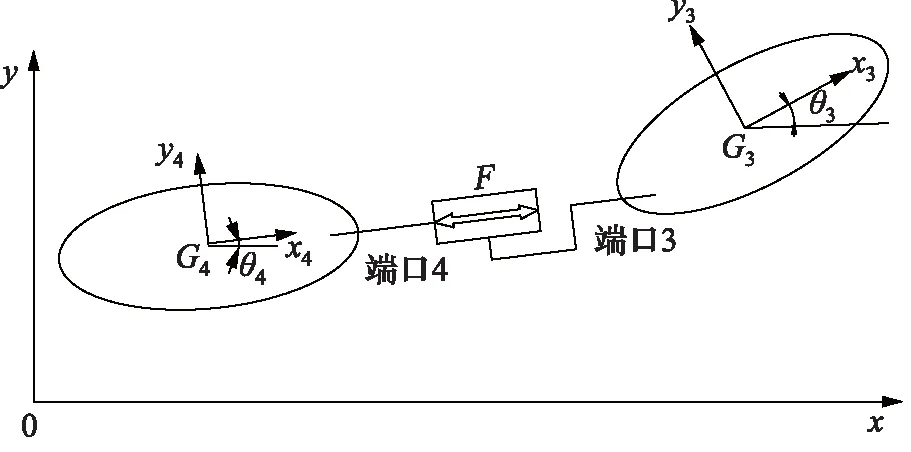
图4 移动铰建模
移动铰角度约束关系式为:
res(l1)=θ4+α4-θ3-α3
(7)
式中, res (l1)为两刚体杆件的相对转角;θ3,α3,θ4,α4分别为端口3,4所在刚体杆件和移动铰运动轴的转角。
端口3必须在端口4的ui轴上,可得:
(8)


(9)
式中,xr3,yr3,xr4,yr4分别为端口3、端口4在刚体杆件体坐标系上的相对坐标;x3,y3,x4,y4分别为端口3、端口4在绝对坐标系上的运动位移;ui为端口4所在刚体杆件体坐标系的x轴。
从而得到移动铰位移约束关系式如下:
res(l2)=-xr4sinα4+yr4cosα4+
(x3-x4)sin(θ4+α4)-
(y3-y4)cos(θ4+α4)+
xr3sin(θ4+α4-θ3)-
yr3cos(θ4+α4-θ3)
(10)
式中, res (l2)为端口3和端口4的相对距离。
4) 升降臂机械系统建模
图5所示为利用平面机构库建立的升降臂双平行四边形连杆机构动力学模型,为简化建模过程,其余与升降臂连接的构件如飞臂等,相关质量和转动惯量均等效到伸缩臂上。在升降臂起升过程中,变幅油缸不参与运动,可用刚体杆件等效。从图中可以看出,平面机构库建模单元和升降臂实际连杆机构一一对应,建模过程具有快速、准确、规则化的特点。
9.价值观等方面的认知错乱。多元文化使学生价值观形成多元化,在面对价值观的判断和选择时,统一的标准难以形成,引起在价值观等方面的认知错乱。

图5 升降臂机械系统建模
2.2 升降臂液压系统建模
核岛支架安装作业车采用蓄电池驱动,为提高设备能量利用率和连续作业时间,采用负载敏感液压控制系统[11]。利用AMESim的标准液压库建立如图6所示升降臂液压系统。从图中可以看出,升降臂的液压回路主要由负载敏感阀、负载敏感泵、平衡阀和升降油缸组成。升降油缸活塞杆在高压液压油作用下进行伸缩运动,2个工作油口的压力信号通过负载敏感阀的反馈回路传递到负载敏感泵的流量控制阀,流量控制阀根据感受到的压力变化动态调整阀芯工作位置控制斜盘倾角,使得变量泵排量实时满足升降油缸运动速度需求。平衡阀可以保持升降臂稳定地停靠在任意工作位置,并提供背压控制升降臂下落速度,防止出现负值负载超速运动[12]。

图6 升降臂液压系统建模
2.3 升降臂机液耦合动力学建模
升降油缸输出端和移动铰输入端连接后,建立起升降臂机液耦合动力学模型如图7所示。升降油缸活塞杆输出位移给移动铰,从而驱动整个升降臂的起升,而在起升过程中,连杆1通过移动铰将整个升降臂重心位置改变引起的负载变化传递给升降油缸活塞杆,升降臂负载敏感液压系统感受升降臂外负载变化,仅提供执行机构所需的压力和流量,具有较高的能量利用率。
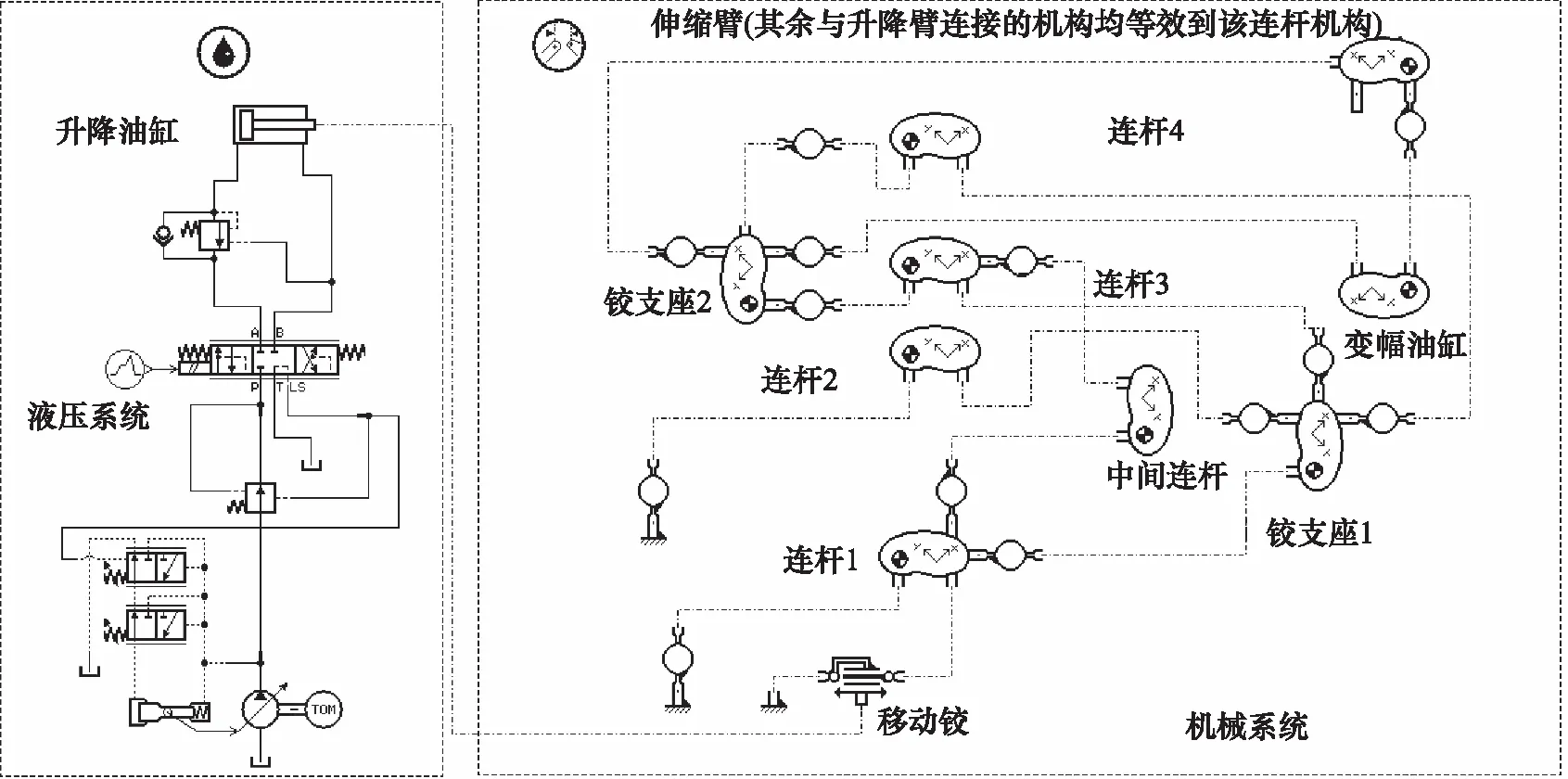
图7 升降臂机液耦合动力学建模
3 仿真分析
通过AMESim建立的升降臂机液耦合动力学模型,不仅可以用来观察升降油缸工作油口压力变化等容易测量的状态变量,也可以用来研究铰接点约束力等不易测量的状态变量,以便确定载荷以及对升降臂连杆等机构进行有限元强度校核。表1所示为升降臂主要参数设置。
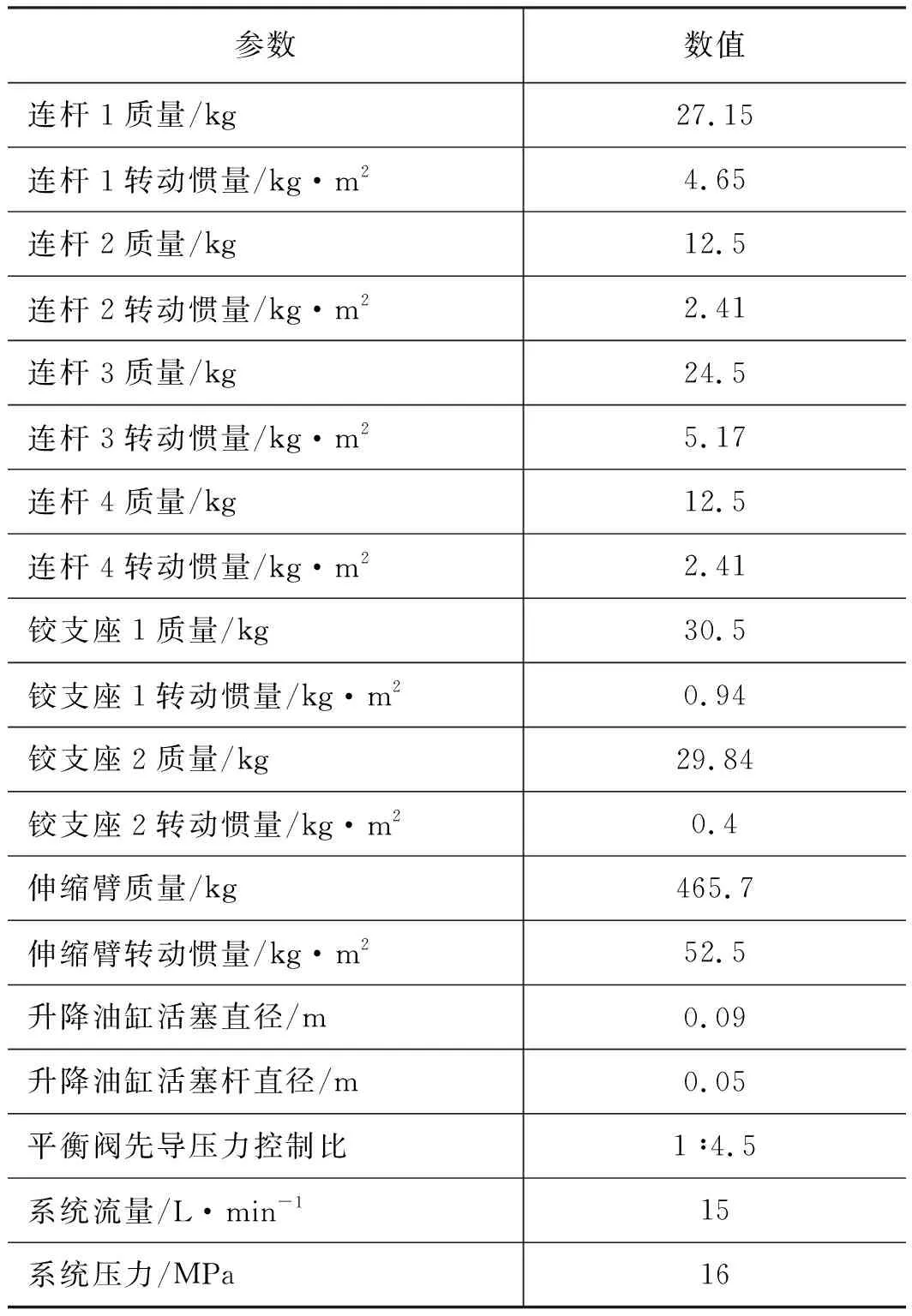
表1 升降臂主要参数
升降臂系统仿真时间10 s,仿真步长0.01 s,所得仿真结果如图8所示。从图中可以看出:
(1) 在0~2 s时间内,由于升降臂启动时的惯性冲击,兼之液压系统压力建立需要一定时间,负载敏感阀进出口明显出现压力波动,经过2 s时间的反复振荡后,系统压力趋于稳定。由于定差减压阀的压力补偿作用,负载敏感阀进出口压差基本保持在1.5 MPa左右,使得系统出口流量稳定在15 L/min,杆件1、杆件3稳定转动, 铰接点D,H在竖直平面内稳定上升。铰点B的约束力变化规律和系统压力相似,这表明对升降臂机构进行强度校核时,必须考虑系统启动瞬间机液耦合作用引起的冲击力;
(2) 在2~8.6 s时间内,升降臂稳定上升,负载敏感阀进出口压力变化平缓,进口压力由8 MPa稳定减至5.7 MPa,出口压力由6.5 MPa减至4.2 MPa,进出口压差保持在1.5 MPa,系统出口流量稳定在15 L/min,连杆1、连杆3稳定转动,两者转动方向相反,转动角度大小基本相等。这是因为随着升降臂油缸活塞杆伸出位移增大,负载虽然没有明显变化,油缸的作用力臂却逐渐增大,系统压力随着缓慢减小。铰接点D的y轴方向位移由0.755 m增至1.5 m,x轴方向位移由0.38 m减至-0.2 m;铰接点H的y轴方向位移由1.4 m增至2.87 m,x轴方向位移保持在-0.76 m不变。这是因为升降臂是由2个机构尺寸相同的平行四边形对称布置,铰接点D在x轴方向有位移变化,但铰接点H在x轴方向无明显位移变化,这保证和铰支座2铰接的伸缩臂等机构只在竖直平面垂直升降。在2~7.2 s时间内,铰接点B的约束力由31000 N减至3300 N,在7.2~8.6 s时间内,铰接点B的约束力又逐渐增大;
(3) 在8.6~10 s时间内,由于伸缩臂油缸的活塞杆运动到最大位移,液压系统开始憋压,此时负载敏感阀出口压力由4.2 MPa突增至16 MPa,进口压力由5.7 MPa突增至16 MPa, 进出口压力相等, 定差减压阀失去压力补偿作用,伸缩油缸压力反馈到变量泵,使得变量泵的压力控制阀工作,斜盘倾角为0(仿真中没有考虑泵的泄漏),系统不再输出流量。连杆1,3的转角、铰点D,H的位移以及铰点B的约束力保持不变。
4 试验分析
在支架安装车上搭建试验测试平台,将压力传感器安装在升降油缸与平衡阀之间采集无杆腔工作压力,将倾角传感器安装在连杆1上采集转动角度。设置传感器的采样周期均为0.1 s,连杆1的初始角度等于0。升降油缸由电比例先导操作手柄控制,操作手柄进行升降臂的起升控制,当升降臂到极限位置时,停止供油。通过数据采集卡和计算机对升降油缸无杆腔油压和连杆1转角数据进行采集、存储和绘图。试验结果与仿真结果对比如图9所示。
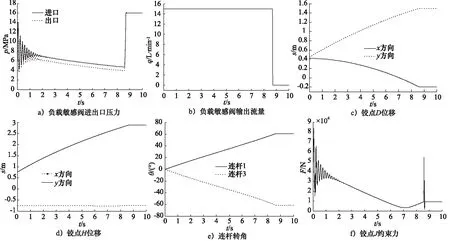
图8 升降臂系统响应曲线
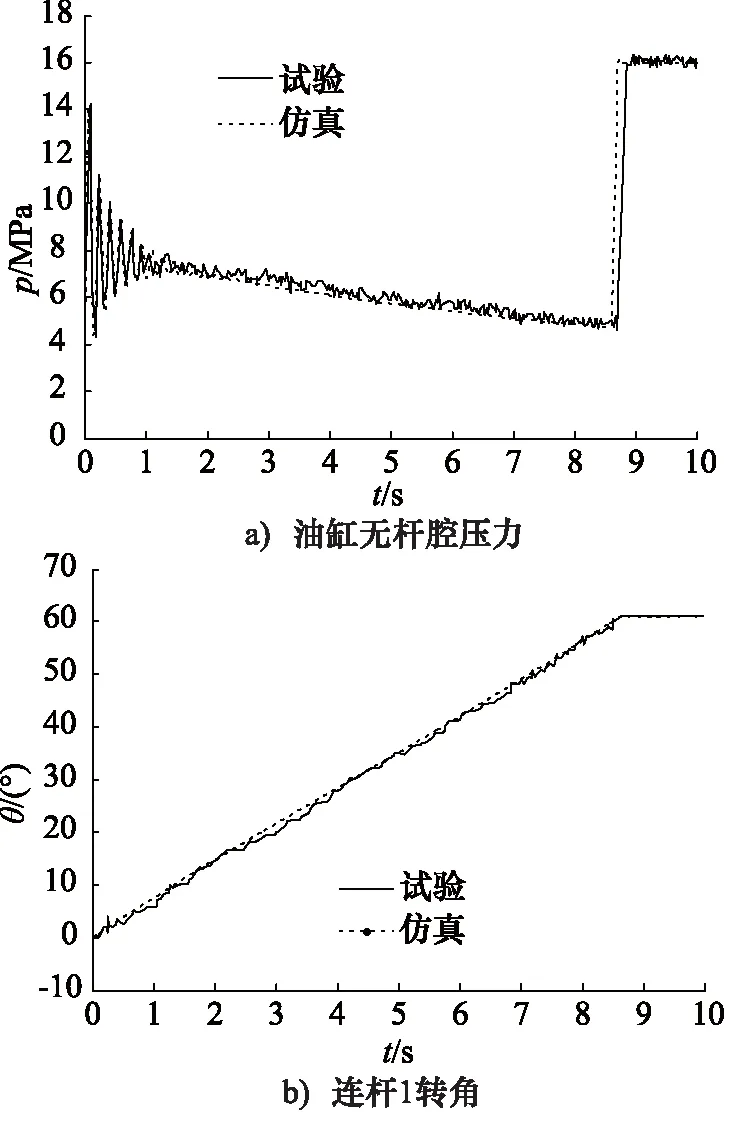
图9 升降臂试验与仿真结果对比
从图9中可以看出,在升降臂起升开始和结束时,试验结果与仿真结果基本相同,在整个运动过程中,两者的变化趋势也基本相同,但由于设备在运转过程中,受液压系统和实际操作的影响,试验数据会有一定振荡,且无杆腔实际工作压力大于仿真值。这是因为在仿真过程中没有考虑变量泵输出油液的脉动性及平衡阀阀芯振动对系统影响,兼之传感器测量精度、仿真变量与实际参数取值的差异,这些都对仿真结果造成了影响,但油缸无杆腔工作压力和连杆1转角的仿真结果与试验数据最大偏差率在10%以内,可以认为本研究建立的动力学模型和仿真分析结果的正确性,利用该动力学模型能够较为准确的预测升降臂升降的动力学特性。
5 结论
根据核岛支架安装车升降臂的结构组成和工作原理,基于AMESim建立升降臂起升过程机液耦合动力学模型,并进行仿真分析和试验研究,可以得出如下结论:
(1) 在升降臂起升开始阶段,由于负载惯性和建压延迟响应,液压系统的压力冲击较大,但最终趋于稳定,且最大工作压力小于变量泵压力切断设定值,满足设计要求;
(2) 在整个升降臂起升阶段,系统输出流量稳定,连杆1和连杆3的转动角度大小基本相等,可以保证伸缩臂及其连接结构的垂直升降,便于支架安装定位;
(3) 利用建立的AMESim模型可以获得铰点约束力等难以测量的状态变量变化规律,为升降臂连杆结构有限元分析时准确施加作用力提供指导;
(4) 仿真结果和试验结果比较吻合,验证了所建模型的准确性,为进一步分析和优化升降臂动力学性能提供参考。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
交通科技与管理(2022年9期)2022-05-24
工程力学(2022年2期)2022-02-11
四川建筑(2021年1期)2021-03-31
装备制造技术(2020年2期)2020-12-14
建筑机械化(2020年7期)2020-08-15
北京航空航天大学学报(2017年1期)2017-11-24
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年3期)2017-06-23
科技创新与品牌(2016年8期)2016-09-29
