基于压痛耐受力的手柄接触面人机形态设计
2020-12-11 11:58翟广忍
计算机集成制造系统 2020年11期
蒋 超,俞 琳,2,翟广忍
(1.西安工程大学 服装与艺术设计学院,陕西 西安 710068;2.西北工业大学 现代设计与集成制造技术教育部重点实验室,陕西 西安 710072)
0 引言
手柄接触面设计是产品人机形态设计领域最复杂的研究课题之一[1],主要原因为:①手掌曲面形状十分复杂;②手掌曲面在不同工作姿态下也会产生相应的变形;③工作时受到外部机械压力,手掌曲面会发生复杂变形,即接触变形;④疼痛感是接触面主观人机评价的重要因素[2],手掌的感知神经末梢丰富,疼痛感知阈值较低,对疼痛等不良感受的感知更加灵敏。因此,手柄接触面设计具有曲面形状复杂、曲面变化丰富、舒适度要求高、不适感知灵敏等特点。
目前,计算机辅助接触面人机形态设计主要有两种方法:①基于人体形状尺寸的设计方法[3-5],利用不同的测量方式对人体数据进行采集并拟合曲面,再进一步考虑人体曲面的接触形变,利用遗传算法等对初步生成的曲面进行修正和优化,这种方法更适用于人体不发生接触变形或变形轻微的接触面人机形态设计;②基于接触面压力的设计方法,以接触面压力作为设计驱动因素,通过测量接触面压力数据,采用形态映射[6]、能量优化[7-8]等方法求解曲面方程,来进行接触面的人机形态设计,该方法更全面地考虑了人体因接触变形导致的自身形状变化,更符合接触面人机形态设计的实际情况。
为减轻用户痛感,避免局部组织损伤,更好地达到提升产品人机的主观舒适性和客观安全性的目的,本文在考虑人体接触变形的基础上,进一步考虑压强分布的合理性,完善疼痛耐受力测量方法并进行实验,使用疼痛感作为曲面建模的虚拟载荷,提出一种基于压痛耐受力的手柄接触面人机形态设计方法,旨在获得更加合理的手柄接触面人机形态,从而根据手掌各部分疼痛耐受能力的不同更加科学地分配接触面的机械压力。
1 疼痛感知特性和耐受力实验要点
1.1 疼痛感知特性
疼痛研究国际协会定义,疼痛是与实际或潜在的组织损伤相关联的不愉快的感觉和情感体验[9]。根据定义可知,由手柄接触面产生的手掌痛感并非源于手掌组织的真实损伤,应属主观心理预警范畴,因此个体之间的疼痛阈值和疼痛耐受能力存在主观差异。影响个体疼痛耐受力的因素包括年龄、社会文化背景、个人经历、个性心理特征、情绪、注意力、疲劳程度、温度[10]等。
1.2 手掌压痛耐受力实验要点
手掌压痛耐受力实验的目的是通过压力测量设备采集引起手掌各点疼痛感知的机械压力数据,根据人体的疼痛感知特性,为更科学有效地采集实验压力数据,将实验要点整理如下:
(1)实验环境 因为人体疼痛耐受力受外部环境影响,尤其是温度对疼痛耐受力的影响较大,所以实验应在真实工作场景或模拟真实场景的实验室中进行。
(2)测量工具 采用专业压力测量仪。为了使采集点之间互不干涉,探头测量位置应该相切或相离。设受测人员最短指关节的长度为Lmin,施压探头直径为Dhed,一个指节中需采集的插入采集点数据为Ncol个,则Dhed≤Lmin/Ncol。经比较研究发现,探头直径过大会导致采集点疏散或采集点数据相互影响,从而影响数据采集的精度;直径过小,难以对机械压力进行逐步微增,也容易在实验过程中造成组织损伤和不良的心理影响。
(3)样本筛选 在样本选择上,由于疼痛耐受力具有个体差异,应选取真实的目标用户人群进行实验。
(4)样本心理 由于样本的疼痛耐受力受心理因素的影响,为消除样本在实验过程中产生的焦虑、茫然、紧张等影响实验数据有效性的不良情绪,实验前需对样本进行心理辅导。心理辅导主要包括:①充分告知实验的目的、意义、过程、时长、保护措施等信息,增进样本对实验的了解,使样本明确自身任务,从而提高样本的配合度;②告知样本在实验过程中可能产生的不良感受,如疼痛感等;③为了避免他人施加机械压力导致的样本心理紧张,可由样本自主施压;④构建样本的疼痛联想,使样本将实验过程中的痛感联想为实际工作中的痛感,以提升数据采集的有效性。
(5)测量位置 由于个体手掌存在大小、形状的差异,机械压力的施加位置不应采用绝对坐标系表示。手掌骨骼和关节是手掌天然的相对坐标系统,可利用手掌关节位置确定机械压力的主要测量点,并在关节测量点之间插入补充测量点。
(6)过程控制 施压时,机械压力从0开始逐步增大,增压的过程要适当缓慢,避免因意外损伤和突发刺激对样本造成不良的心理影响。另外,实验对样本手掌进行多点测量,每次测量一个点,两次测量需要有一定时间间隔,间隔时间需保证上次测量的疼痛感完全消失。
(7)疼痛量化 采用主诉疼痛分级法[9]。对主诉疼痛分级法进行简化,将实验过程中产生的疼痛分为Ⅲ级:Ⅰ为无痛感;Ⅱ为有痛感,可以忍受;Ⅲ为有痛感,无法忍受。采用Ⅱ~Ⅲ的突变点作为样本的疼痛耐受力数值。实验过程中,样本通过语言随时向实验人员描述疼痛强度。
2 手柄接触面人机形态设计能量优化模型
将实验获得的数据作为外载荷,利用能量优化模型设计静态曲面。能量优化法以曲面拥有的最小物理变形能量为目标,采用约束和施加外载荷的方式控制曲面形状,其优势在于可以通过接触面压力分布驱动曲面形态设计,为手柄接触面设计提供更好的力学依据[1]。曲面物理能量模型为
(1)
式中:w为曲面参数方程;wu,wv为曲面的二阶导矢;wuu,wvv为曲面的二阶偏导矢;wuv为混合偏导矢;α和β为给定的材料特性参数,决定物体抵抗变形的能力;-2wf(u,v)是外加载荷修正项,记为Eforce。

以Bezier曲面为例,设Pij(i=0,1,2,…,m,j=0,1,2,…,n)为(n+1)×(m+1)个空间点列,则n×m次张量级形式的Bezier曲面定义为
u,v∈[0,1]。
(2)

(3)
整理式(1)~式(3),求解最小能量即求Esurf的最小值,采用数学规划法,以C2曲面为例,优化目标有(n+1)×(m+1)个变量Pij,可用拉格朗日乘子法求解,即
(4)
式中:X为有控制点坐标分量组成的N维向量,N=3[(m+1)+(n+1)],m+1,n+1分别为曲面控制点的行数和列数;H为N阶对称正定方阵,用于确定能量函数的二次项;g为N维向量,用来确定能量函数的一次项;H和g为α和β的函数[6]。文献[7-8]对C2曲面能量法的求解过程进行了详尽地阐述。
最小能量计算结果对应曲面的函数记为Surf(u,v),其与外载荷有相同的起伏趋势,需进行镜像处理;另外,在不造成伤害的前提下,手掌能够产生的最大变形是一定的。因此,曲面的峰值需控制在一定范围内。对Surf(u,v)进行处理和优化,获得的最终曲面为
Surf′(u,v)=-γSurf(u,v)。
(5)
式中γ为变形系数,可以有效控制值曲面Surf′(u,v)上的点的Z轴坐标范围,使其高度极差符合皮肤变形量,从而满足和释放皮肤的变形能力。
3 骨粒串主导的曲面变形关键技术
通过能量优化模型获得的静态曲面需根据手掌的工作姿态进行变形,才能更好地应用在产品设计中。骨粒串主导的曲面变形技术在曲面上根据人体骨骼设置骨粒串,通过骨粒串模拟工作状态下的骨骼姿态,不但可以在没有人体解剖的基础上高度真实地驱动曲面变形,而且能够有效防止曲面直接变形中存在的塌陷、萎缩等问题[10]。
将关节记作O,骨粒记作b;Oi表示第i个关节,i=1,2,3,…,n,n为关节数量;bij表示第i个关节控制的第j个骨粒,j=1,2,3,…,m,m为关节对应的骨粒数量。因为骨粒不仅自身运动,还驱动曲面变形,所以每个骨粒不仅具有空间坐标值,还需构建局部坐标系,以计算在局部坐标系中相应曲面坐标点的变化。
b=POS,LC,∑sij;
(6)
s=POSL。
(7)
式中:POS为骨粒的世界坐标;LC是以b为原点的局部坐标系;s为附着在b上的曲面点;POSL为曲面点s在局部坐标系LC中的坐标值。
一般来说,关节运动通常分解为绕X轴、Y轴、Z轴的旋转,但曲面点位移需通过骨粒来扭转,因此采用扭转分量T、扭转角度δ、旋转分量R、旋转角度θ表示关节运动。M(t,k)表示人体第k个关节Ok在第t帧的运动姿势,
M(t,k)=T(t,k)R(t,k)。
(8)
式中扭转分量T只影响骨粒点的局部坐标系朝向,用于计算曲面点的新坐标,并不影响骨粒点的坐标。
3.1 骨粒新坐标计算方法
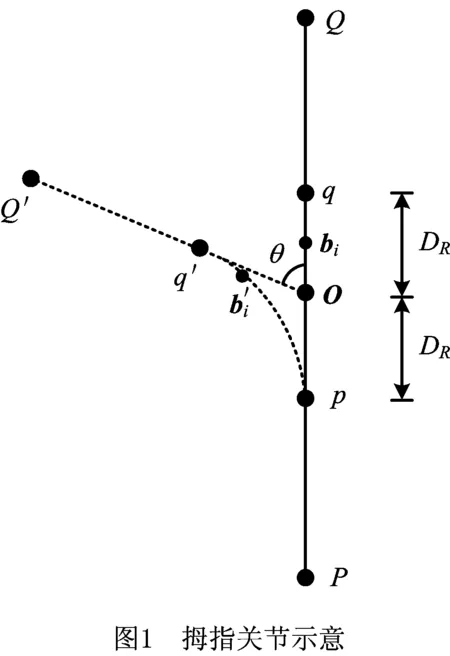
以拇指关节为例(如图1),为方便表述,记O为拇指第1关节,OP为第2指节骨粒串(连接手掌的指节),OQ为第1指节骨粒串。Q绕指关节旋转θ到达Q′时,原OQ骨粒串上的每一骨粒坐标的计算方法如下:
(1)确定变形范围DR运动时,将靠近关节处的骨粒串段运动视为塑性变形,远离部分的骨粒串段视为刚性运动。在OP,OQ上设定临界点p,q,则Pp,qQ为刚性运动段,pq为塑性变形段。
(2)骨粒旋转权值计算 为使曲面弯曲更加自然光顺,将圆弧pq′作为pq的变形结果,pq′的两端与pP,q′Q′相切。使旋转角度θ均匀分布在每个骨粒上,则骨粒bi的旋转权值
(9)
如果wi(wi∈[0,1])在pq段骨粒上线性分布,则骨粒bi的新坐标为
(10)
式中:O′为圆弧pq′的圆心,O′B为垂直于平面pO′q′的旋转轴,Rotate(O′B,wiθ)表示绕O′B旋转wiθ的旋转矩阵。
3.2 曲面点新坐标计算方法
计算曲面点新坐标时,需在骨粒点新坐标的基础上计算局部坐标系LC的转向矩阵Ci:
Ci=Rotate(IT,wiδ)Rotate(IR,wiθ)。
(11)
式中Rotate(IT,wiδ)和Rotate(IR,wiθ)分别表示局部坐标系绕扭转轴IT旋转wiδ的变换矩阵和绕旋转轴轴IR旋转wiθ的变换矩阵。
设si,k为附着在bi上的第k个曲面点的坐标。将si,k在LC中的新坐标叠加到b′上,则si,k的新坐标
(12)
4 手柄接触面人机形态设计过程
手柄接触面人机形态设计过程十分复杂,上述内容仅涉及设计过程中的关键技术,勾勒出设计过程的3个重要阶段:①手掌疼痛耐受实验和实验数据的获取;②将手掌疼痛耐受实验数据作为外载荷,利用曲面能量优化法求解曲面,获得静态曲面模型;③采用曲面变形技术将解出的曲面根据手掌的操作姿势进行变形和应用。另外,设计过程还包括构建实验环境、评价应用效果、优化设计等内容。设计过程如图2所示。

5 实验数据和实例验证
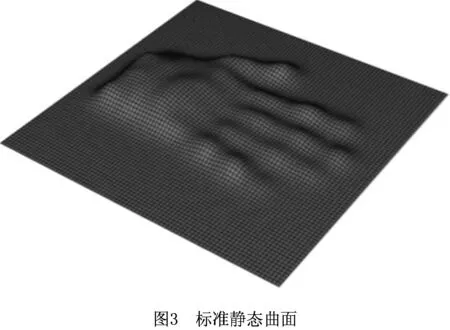
本文采用艾普压力测试仪SF-100,由于受测人员小指指节的最小长度为17 mm,为方便插入3个互不干涉的测试点,选用设备自带直径5 mm平底探头,利用峰值测量模式,对160名男性搬运工的指部(61个采集点)和掌部(56个采集点)进行疼痛耐受力实验,受测人员年龄在21~30岁之间。为确保数据的有效性,将实验数据分为两组,信度检测克朗巴哈系数为0.883,大于0.8。其中最大值为66.1 N,最小值为15.3 N,数据的归一化结果如表1和表2所示。

表1 指部压痛耐受力数据

续表1
表2 掌部压痛耐受力数据
将手掌压痛耐受力实验数据作为外载荷,由于受测对象皮肤的变形深度为3 mm,将变形系数γ设置为0.3,采用能量优化模型获得的标准静态曲面如图3所示,所获得的新曲面高度极差为3 mm。
针对提手手柄形态设计,截选工作接触面,利用Dexmo手部变形设备和骨粒串主导的曲面变形技术对标准静态曲边进行变形,经完善设计后,得到提手手柄形态设计方案,如图4所示。

利用3D打印技术将设计方案实体化,并选取5名非实验人员对新方案和传统提手手柄进行比较试用和评价。评价通过两个实验完成:
(1)有效接触面染色实验 在提手工作受力面薄涂染色剂,通过接触对手掌进行着色来测量有效工作接触面积。接触面染色结果如图5所示。图中,新设计的提手在小指和手指两侧的接触面积均明显增加。经测量计算,传统提手的有效接触面积约为16.28 cm2,新设计提手的有效接触面积约为27.74 cm2,有效接触面积增大了约70.4%。

(2)单手静态提力测量实验 测量新设计的提手能否有效提升受测人员的静态提力,以及静态提力的提升效果。单手静态提力测量结果和提升效果的数据如表3所示。
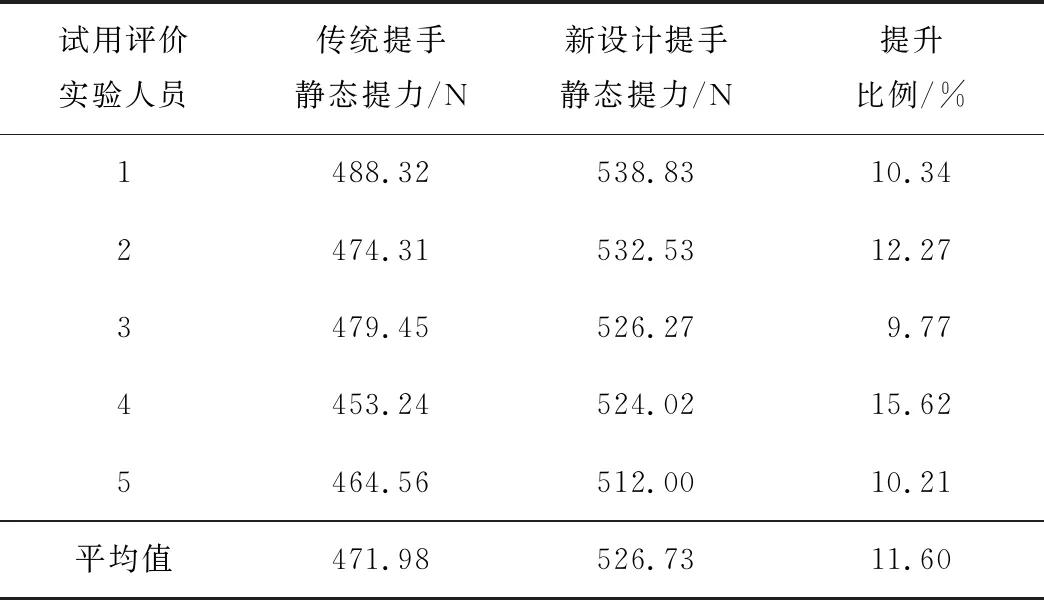
表3 单手(右手)静态提力测量实验数据
实验结论显示,在手掌工作接触变形时,新设计的提手手柄方案的有效工作接触面积更大,而且相对于传统手柄,采用新方案能够显著提升单手静态提力,可认为新设计的提手在平均压强和受力分布方面具有更高的人机性能。
6 结束语
疼痛感是制约人体工作能力的重要因素,也是主观舒适度评价的关键因素。以手掌疼痛耐受力为研究的出发点,本文采用能量优化模型和骨粒串变形技术进行手柄接触面人机形态设计,为接触面人机形态设计提供了新的思路。验证表明,基于压痛耐受力的手柄接触面人机形态设计方法具有可行性,为手柄人机形态造型设计提供了更为科学的生理学和力学依据。
本文研究还在验证阶段,仍存在一些缺陷和遗憾,例如限于实验条件和设备,无法直接准确测量接触工作状态下触面各点的压力数值,仅能通过接触面积实验和静态提力实验在一定程度上反映新设计把手的人机优势,这也是未来继续研究的方向。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
南都周刊(2021年3期)2021-04-22
中国保健营养(2019年4期)2019-09-10
儿童故事画报(2019年12期)2019-01-07
小学生导刊(2018年22期)2018-08-21
小溪流(画刊)(2017年1期)2017-03-16
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
灾害医学与救援(电子版)(2016年4期)2016-03-11
灾害医学与救援(电子版)(2016年3期)2016-03-11