
中值小波阈值混合滤波在粗对准中的应用
2020-12-08 03:37:24许建国王少蕾
计算机测量与控制 2020年11期
许建国,周 源,王少蕾
(海军工程大学 兵器工程学院,武汉 430033)
0 引言
捷联惯性导航系统(strap-down inertial navigation system,SINS)初始对准是实现武器装备高精度导航定位的关键技术。初始对准过程一般分为粗对准和精对准两方面进行,在进行短时间的静基座粗对准之后,使姿态角误差收敛在较小的范围后,采用卡尔曼滤波进行精对准[1-3]。粗对准过程常用的方法是采集一段时间的信号后进行平均,然后求解粗对准姿态角,车载SINS在进行静态初始对准时,受车辆发动机振动、人员上下车走动等外界环境影响,陀螺和加速度计测量误差较大,考虑干扰影响,一般选择采集较长一个时间段内的信号用于粗对准过程,由此带来对准时间增加、精度偏差变大的问题。
综合小波阈值滤波在惯导系统信号采集处理中的应用研究[4-6],并参考小波阈值滤波和中值滤波在液压、医学和图像处理等其他领域中的应用[7-8],针对粗对准过程中由于外界环境干扰引起的信号采集噪声,提出了采用中值滤波和小波阈值滤波相结合的混合滤波方案对信号进行滤波,有效地降低了外界环境干扰带来的噪声,在对采集信号完成处理后,可以更快地实现粗对准计算,对准精度也有了较大的提高。
1 粗对准原理
静基座粗对准采用解析对准方法,利用重力矢量和地球自转角速率的测量值,用解析的方法直接计算出载体系到导航系的变换矩阵[9],详细推算如下:
对于某一纬度L(L<90),有:
fn= [0 0 -g]T
(1)
(2)
(3)
(4)
由于捷联姿态矩阵为正交矩阵,即:

(5)
构造新矢量求解姿态矩阵:
令r1=f,r2=f×w,r3=f×w×f,则有:
(6)

根据式(6)可知,在理想状态下进行静态粗对准,采用一组结果即可以实现对准的要求,但是由于信号采集过程中受外界环境的干扰,一般采用N组数据求平均值的方法,消除采集过程中的随机噪声后再进行计算。
此方法存在着一定的弊端,假设车辆静态对准过程中理想姿态角为[0 0 30°],采集100组数据后进行平均计算,求解初始姿态矩阵。如果前99组采集数据较为理想,但是第100组数据时受外界干扰,y向陀螺上增加了-0.01°/s的角速度,根据公式(6)计算后得到的粗对准姿态角为 [0.006° -0.005 9° 168.269 7°],水平姿态角误差仍然较小,但是方位失准角增大了约140°,造成了明显的偏差。初始失准角越大,则在后续过程中进行精对准的滤波收敛时间就越长,滤波收敛精度也越低。因此考虑在短时间内的粗对准中,应该尽可能地实现高的对准精度,为下一步高精度、快速收敛的精对准做准备。
2 信号滤波方案
2.1 信号来源
根据车载SINS粗对准时所处环境,分别在车辆静止状态、发动机启动、人为干扰等条件下进行数据采集和分析。车辆静止状态下,SINS采集数据后进行粗对准计算精度最高,考虑外界干扰因素,对发动机振动、人员上下车及走动等环境下的数据进行采集处理与分析。惯导输出的有效信号主要为低频直流信号,当外界产生干扰时,主要有突变噪声信号及平稳噪声信号。其中,突变噪声主要是由人员上下车,开关车门等干扰引起,平稳噪声信号由发动机振动等干扰引起。
2.2 信号处理方案
根据对采集信号的分析,要实现精确快速的粗对准,就要对信号采集过程中出现的突变噪声、平稳噪声等信号进行滤波处理,使粗对准计算使用的数据偏差尽可能降低。
针对信号采集过程中出现的突变噪声信号,采取中值滤波方案,其主要应用于对脉冲噪声信号的抑制,并能较好地保持信号边缘特征[10-11],但难以滤除白噪声信号。小波阈值滤波去噪适用于白噪声和宽带噪声,对于在复杂环境下采集的信号(如含有脉冲噪声等),得不到很好的效果[12]。
综合中值滤波和小波阈值滤波的优点,采取混合滤波方案,首先采集信号经中值滤波滤除强脉冲噪声信号后,再采取小波阈值滤波,滤除中值滤波后残留在有效信号中的平稳随机噪声分量。
3 数据采集与处理
3.1 数据采集方案设计及信号分析
为验证算法的有效性,进行如下的试验:SINS固连在车上,分别在车辆无振动干扰、车辆发动机振动和人员上下车走动3种情况下进行信号的采集,时间均为600 s。第一种情况下,车辆保持静止不动,此时发动机不工作,人员在车辆附近保持安静;第二种情况下车辆发动机启动,人员在车外保持静止;第3种情况下仍然保持车辆发送机启动,人员正常保持活动,其中,230 s左右,人员开启车门上车,并在车内走动坐下,持续时间大约30 s,330 s左右,进行持续的车内晃动,持续时间约15 s,此后进行偶尔较快时间的车内移动,520 s左右,人员开启车门下车,并在570 s左右时,推动车辆侧面晃动。
陀螺和加速度初始测量输出值为脉冲信号,为方便对比观察,经测量转换后变成角速度信号和加速度信号进行显示,如图1至图3所示为3种情况下SINS采集信号结果图,表1为x向陀螺和加速度计3种情况下的采集信号分析对比。

图1 静止状态下SINS输出信号图

图2 发动机振动状态下SINS输出信号图
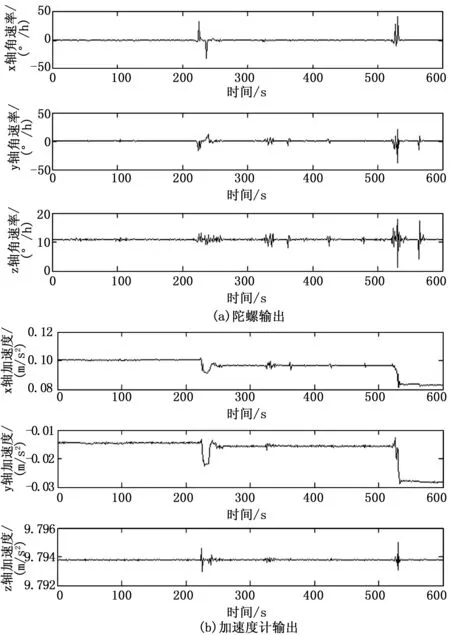
图3 发动机振动状态加人为干扰下SINS输出信号图

表1 陀螺和加速度计x轴采集信号对比
综合图1至图3结果和表1对采集信号的对比说明,可知:
1)车辆没有启动时,静态采集3个方向上陀螺和加速度计的输出值,由于外界干扰较小,输出波形比较稳定;
2)发动机启动的情况下陀螺仪信号的均值变化不大,但是标准差增大约16倍,加速度值均值也略有增大,但标准差相比陀螺,变化较小;
3)外加人为干扰的情况下,陀螺采集信号均值和方差均变化很大。加速度计信号均值变化较小,标准差也有所增加,但是相比陀螺信号变化,在总体值上较小。
3.2 数据处理及信号分析
分别采用小波阈值滤波和混合滤波方法对后两种采集信号进行处理。采用混合滤波器方案时,中值滤波窗口长度的设置为L=13,可以较好地实现对突变信号的消除。对中值滤波后的信号进行小波阈值消噪处理,采用db4小波作为小波分解的基函数,对信号5层分解,消噪效果较好。图4为采用小波阈值滤波对陀螺信号处理后的结果,图5为采用混合滤波对陀螺信号处理后的结果。

图4 小波阈值滤波结果

图5 混合滤波结果
表2所示为3种状态下x向陀螺采集信号经过两种滤波方法处理后的结果,综合对比表1中x向陀螺信号未经任何处理时的结果,可知:

表2 两种滤波方案下x向陀螺信号对比
1)静态无干扰下的采集信号,两种滤波方法的结果基本相同;
2)单独发动机振动干扰状态下的采集信号,受发动机振动或其他原因造成的信号突变影响,小波阈值滤波无法将其进行有效的消除,信号的均值基本相同,信号的标准差相比混合滤波结果较大;
3)发动机振动加人为干扰下的采集信号,小波阈值滤波方法已不能很好地实现干扰信号的消除。采用混合滤波方案,则仍然可以较好地实现信号的滤波功能,信号均值变化较小,方差保持在较小的误差范围内。
4 粗对准实验设计
4.1 粗对准方案设计
为了验证混合滤波方案对粗对准结果的影响,进行如下的实验设计,采用上节中采集的第三组数据作为目标数据,选取其中一段400 s信号值进行分段粗对准实验,每一次粗对准时间为20 s,将整段测量数据作为20次粗对准的输入数据。粗对准过程分为无滤波处理信号、小波阈值滤波处理信号和混合滤波处理信号3种方式下进行,分别计算并对比3种处理方法下粗对准的结果。
为了特别说明突变信号对结果的影响,将信号中突变的部分作为信号的开始和结束,同时也考虑将某一段突变信号完全作为一次粗对准观测量进行计算。经过分析,选取第170 s至第570 s中的数据作为测量值。其中,在第3、4组数据中的结束和开始中出现了突变信号,第330~350 s、370~390 s信号段中包含了较为完整的小突变信号,后三段数据中均含有较大的突变信号,粗对准仿真计算结果如表3所示。

表3 粗对准结果对比
4.2 粗对准结果及分析
1)3种方法下水平姿态角求解结果差别较小,方位姿态角的求解结果对比偏差较大,无滤波和小波阈值滤波情况下,标准差均达到47°,显示的结果极度不稳定性。采用中值小波阈值混合滤波方案,对准结果标准差为1.588 0°,最大偏差小于3°,证明了采用混合滤波方案的有效性;
2)对第3、4、5、18、19、20组数据的粗对准结果分析,在这六组数据的粗对准计算过程中,陀螺信号在开始或结束部分均发生了较大的突变,导致结果偏差较大,而混合滤波方案仍然能够较好地实现粗对准结果。在第9、11组数据中仍然包含有突变信号,但是由于突变信号起始均包含在20 s的数据中,3种方法下的粗对准结果都比较稳定。
分析原因,主要是水平姿态角的对准结果受加速度计测量值影响,而静止状态下,车辆的角运动比较剧烈,线运动基本可以忽略,加速度计测量值受到的影响较小,因此求解的水平姿态角比较精确。方位姿态角的求解受角速度的影响,在开始或结束时受到突变信号干扰的情况下,采用平均值求解的方法会造成较大的误差,因此第3、4、5、18、19、20组数据粗对准结果偏差较大。由于测量时车辆处于坚固的水泥地上,稳定性较好,车辆的晃动是来回摇摆的,当发生人为干扰时,角速度在出现大的正向变化的同时,也会出现反方向的大变化。因此陀螺信号的突变偏差也是在均值附近上下浮动。当整个突变信号均处于一个粗对准时间周期里时,信号叠加后求平均值结果和无突变时结果差别不大,因此第9、11组数据中偏差较小。
5 结束语
针对SINS初始对准过程中对准精度和对准速度的需求,论文采取中值滤波和小波阈值滤波相结合的混合滤波方法来实现粗对准计算。通过将输出信号首先经中值滤波消除信号中的突变噪声后,利用小波阈值消噪滤除振动噪声和白噪声,从而有效地消除外界环境干扰带来的噪声。实验表明,采用中值小波混合滤波方案,能够较好地滤除信号采集过程中的突变噪声、平稳随机噪声等噪声信号。对采集信号处理后,粗对准精度有了较大的提高,为后续进行快速精对准提供了更好的数据支持,同时提高了装备的快速反应能力。
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
当代陕西(2018年12期)2018-08-04 05:49:20
快乐语文(2018年36期)2018-03-12 00:56:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
探测与控制学报(2015年4期)2015-12-15 15:01:00
