基于空三解算技术的树障测量技术研究
2020-12-08 03:38刘汉君吴锦秋林江涛
计算机测量与控制 2020年11期
刘汉君,吴锦秋,林江涛
(广东电网有限责任公司 中山供电局,广东 中山 528400)
0 引言
树木障碍的隐患是指架空电力线与树木之间的距离小于最小安全距离时可能发生的单相接地,电弧短路,断线等故障,以及其他可能发生的故障。法规规定的最大风偏或最大下垂距离;这样的故障将导致一系列安全事故,例如短路跳闸,大面积停电和森林火灾等问题的出现[1-3]。国内外都有许多传输线障碍的事故发生。2006年,由于电线与树木的树枝缠绕在一起,马来西亚东部发生了大范围的电源故障[4]。据统计,近年来广东省电网因树篱引起的绊倒事故占绊倒事故总数的46%。树木障碍的问题已成为维护和保证电网安全稳定运行的主要隐患。为了避免超高树可能对电网造成的危害,有必要及时发现并消除树障碍的这种隐患。传输线,塔和其他单元始终暴露在周围环境中,小巷中的尤其是树木很可能成为对其的威胁。如果不及时刮除,树与电线之间的距离将破坏文件中标准的安全要求。在这种情况下,将导致传动系统停止运转,从而影响正常工作。因此,测量传输线与树木之间的距离并及时清除树木障碍的隐患至关重要。基于问题的严重程度,很多研究学者结合目前科技探究了多种测量树障的方法。
国内外也进行过很多关于树障测量的研究,并且也取得了一定成果。现将情况汇总。2009年,Yoshihiro Kobayashi等[5]介绍了一种创新概念,利用多光谱立体卫星对图像沿着架空传输权识别危险树木和植物。会自动扫描右侧的多光谱卫星图像,并分析每个像素的颜色(波长)。此扫描可识别健康的植被,其中可能包含会危害传输线的树木。使用多光谱立体图像,可以确定每个像素的高度,并计算与导体的距离。当该距离小于导体周围的危险区域时,则认为识别出的物体或树木会危害电线。2016年,Zhang W等人[6]提出了一种基于LiDAR的自动树障预警方法。获取走廊中传输线和其他类型物体的分类信息。然后,在相应线段的极端天气条件下模拟导体下垂和风向偏航。为了提高计算效率,该方法基于DB-Scan将属于树型的点分成几组。最后,通过计算电线与树木之间的最小距离并结合树木生长周期模型来实现预警。2018年,Chen Q等研究小组[7]提出了一种双目视觉测距方法来测量输电线路与树木之间的距离。基于双目视觉测距原理,使用标记的棋盘格作为校准板对双目相机进行校准。然后,将SAD区域匹配算法应用于预处理后的图像,并获得视差图。最后,根据两个目标点的三维坐标信息,可以得到树与传输线之间的距离。2019年,Mao H.S.等团队[8]在Steger算法的基础上,设计了一种自动检测算法,可以自动提取架空电力线的中心线及其像素坐标。根据双目视觉原理,通过立体匹配算法分别获得架空电力线和树冠轮廓线的三维坐标,然后计算出树障的值。
关于树障测量的研究已有很多,鉴于以上研究,本文在相关算法的基础上,设计了另一种计算树障测量的相关研究,本文利用无人机的遥感数据进行空中三角剖分,立体模型建立和基于MapMatrix软件[9]的双目立体视觉高度提取,然后获得电线与树冠之间的准确而有效的测量,可以实现对传输线势垒值的测量,并通过调整参数,使得最终的测量误差精度可以满足测量树木与输电线路之间距离的需要,至今未有人将这一算法使用在树障测量研究上,在一定程度上有所创新。这项研究不仅符合要求的安全距离,也具有高检测效率,维护成本低,风险低,坚固可操作性等优点。
1 电线路对树冠的距离限值
为了测量电线路与树冠之间的距离,首先需要明确安全范围。根据《架空输电线路运行规程》[10]中的相关规范,电线在其最大垂直弧度和最大风力偏向时和树冠之间的安全距离如表1所示。由图可以看出,不同电压下的最大垂直距离和最大风偏时的安全距离是不一样的。随着电压的增高,安全距离也在增大。
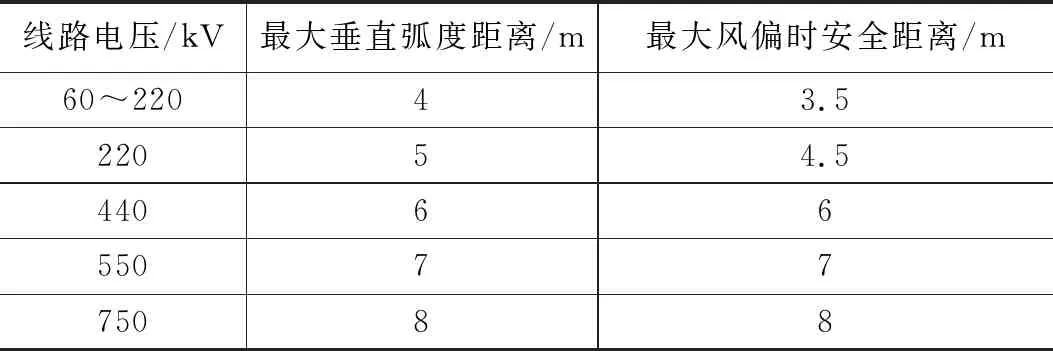
表1 输电线在最大垂直弧度、最大风偏时与树冠之间的安全距离
根据表1所示的不同电压下的不同安全距离,从而制定了相应的树障隐患等级,共分为三个隐患等级,分别为普通隐患、严重隐患、紧急隐患。表2给出了详细的等级分类。
根据表2可以看出国家电网对于三个等级的安全距离归类,依据表格内容进行树障测量的研究具有现实意义。
2 基于空三解算的树障测量
2.1 图像测量原理
本研究使用无人机获得高分辨率架空电力的可见光图像采集物体。基于航空视觉开发软件MapMatrix,一站式空中三角剖分和立体模型建立获取的图像[11]。电源线在电力走廊中的地面高度被提取,并且获取树冠与地面之间的高度,并对获取的高度信息进行评估和分析。在这项研究中, 无人机总共进行了一次飞行,获得的高分辨率无人机遥
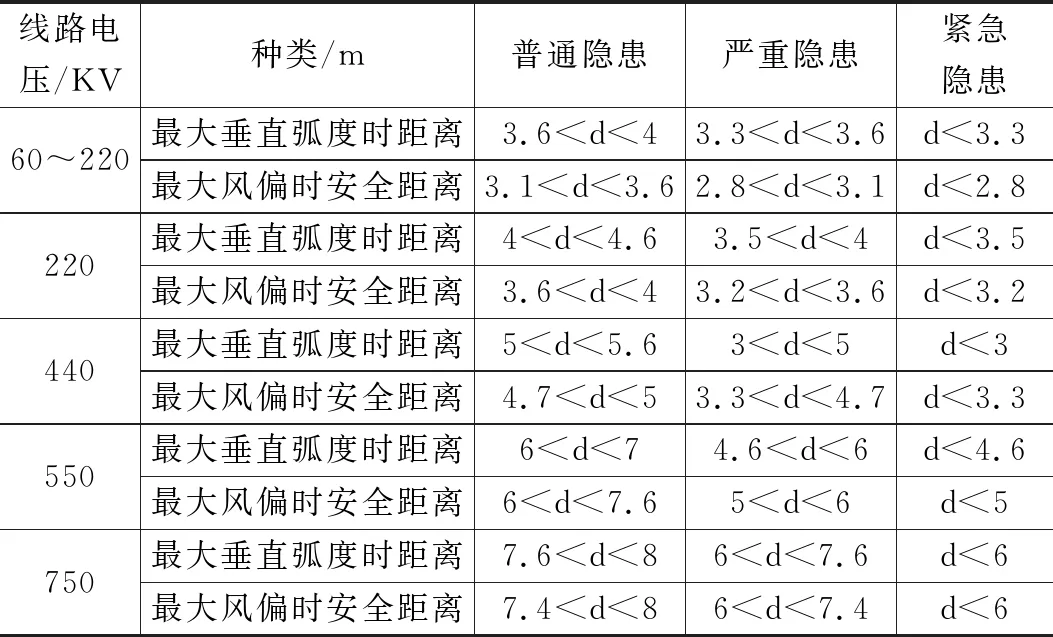
表2 输电线在最大垂直弧度、最大风偏时与
感图像约为10平方千米,如图1所示。在航拍过程中,海拔约为220米,图像的地面分辨率约为5厘米/像素。 为了提高以后的数据质量加工,航向重叠率和侧面重叠度设置为75%。无人机航拍完成后,检查航空摄影图像数据所必需的,主要是检查图像重叠度,云雾度,航向角度和倾斜角度等。最终获得相机参数数据,部分POS数据,图像数据和控制点。

图1 航拍面积图

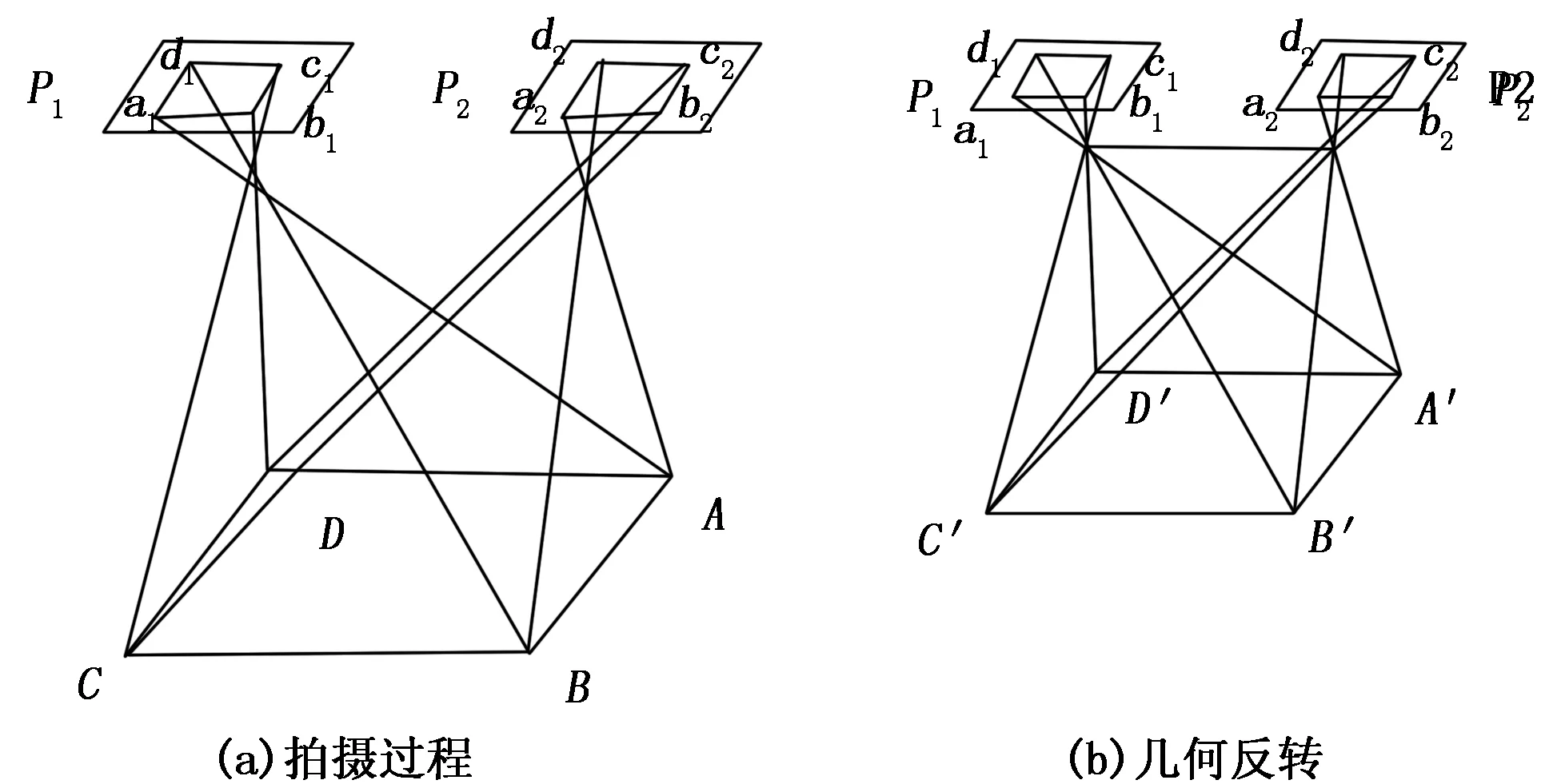
图2 双图像立体映射原理
立体图像的两个图像重叠范围内的任何地面点分别在两个图像上具有其同名图像点,并与相应的摄影中心形成同名射线。同名的摄影射线彼此相交。因此,在摄影基线中,同名图像点和地面点之间存在固定的几何关系。为了对图像对进行立体映射,有必要重建与场相似的几何模型,并符合比例尺和空间方向,如果可以恢复图像对的内外取向元素,则上述固有的几何关系可以恢复,因此可获取3D重建和电力线高程点。
2.2 空三解算剖析
2.2.1 内部方向
内部方向是根据照片的帧标记坐标和相应的照相机校准参数恢复照片和照相机的相对位置,即建立照片坐标系。在执行内部确定之前,必须设置图像的扫描分辨率和相机参数。对于数字图像,MapMatrix的HAT模块可用于全自动内部定向,这将同时自动刷新图像的坐标。执行完后,蓝色投影中心标记将显示在具有成功内部定向的图像中间,如图3所示。对于胶片图像,如果未进行自动校准,则在执行“自动内部定向”操作后,在框架标签的中心,需要人工干预才能进行内部方向编辑校正[14-15]。
图3 内部定向结果
2.2.2 相对方向
当两个摄像机在同一地面上拾取一个立体声对时,任何一对立体声对相同名称的两条光线在对象点处相交,即存在一种现象,即相同名称的一对光线相交,如果保留两个图像,则相对位置和姿态关系不变,将两个图像移动,旋转并更改基线长度,并且同名光线对的特征不改变[16]。分析方法的相对方向基于同名立体图像对的内部几何关系。通过测得的图像点坐标,解析计算出相对方位元素,建立与地面相似的立体模型,确定模型点的三维坐标。相对方向与照片的绝对位置无关,并且不需要地面控制点。相对定向的目的是建立三维模型。空三的操作过程主要取决于相对取向,其质量直接影响绝对取向的结果,进而影响立体效果。
2.2.3 连接点生成和筛选
连接点是用于连接相邻模型的相同名称的图像点。连接点的地面坐标是未知的,但是可以在两个或多个图像的重叠区域中进行识别和测量。连接点还应均匀分布在该区域的图像上,最典型的是每个图像9个连接点。在一个调查区域中,如果有60%的航向重叠和30%的侧向重叠,则每个图像上的9个连接点足以连接整个导航带并获得更高的精度。如图4所示。
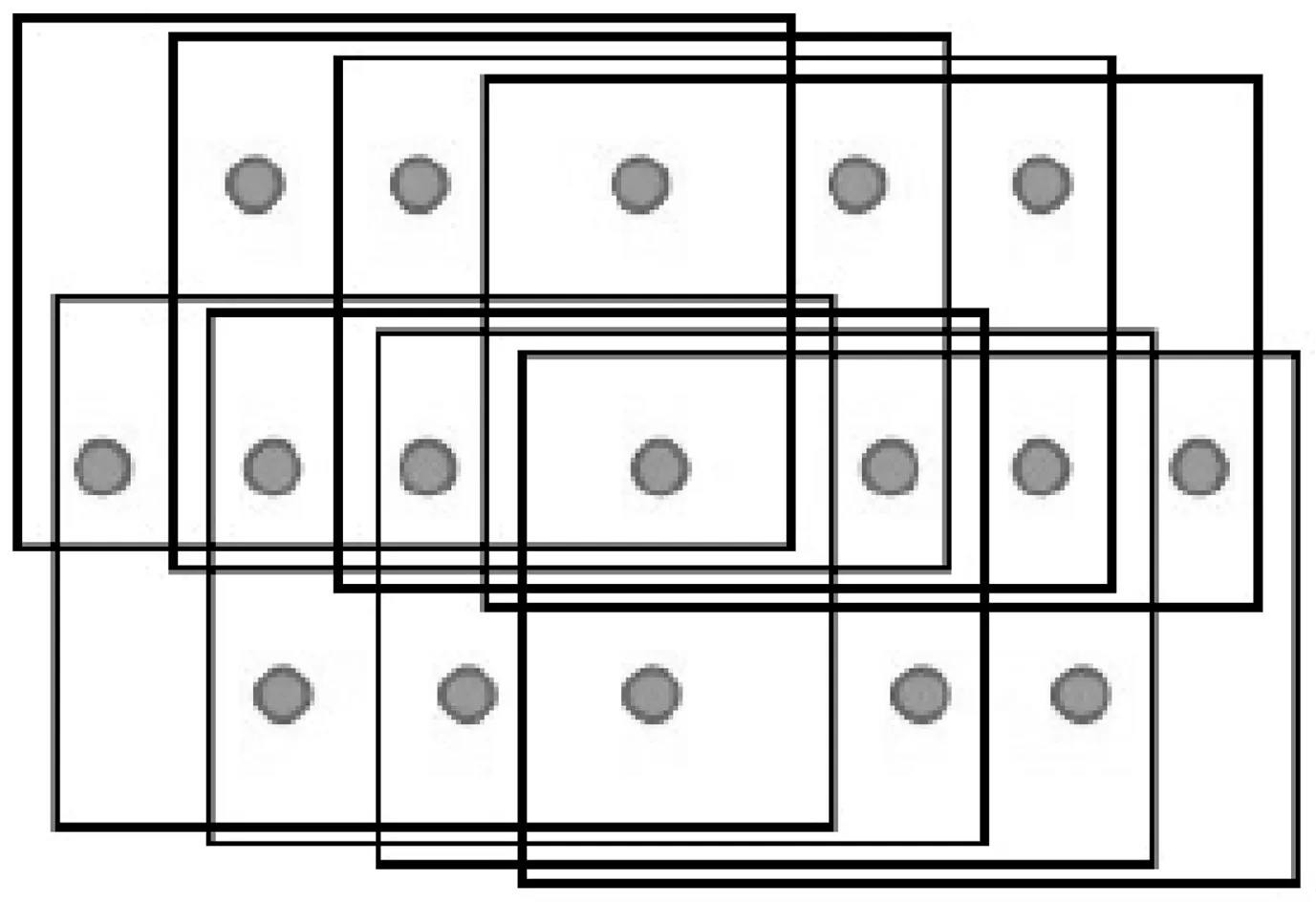
图4 连接点的分布
根据导航带的内外方位元素,摄像机参数,控制点等数据,生成连接点后,需要对连接点的错误点进行过滤和去除,主要是消除重叠度小于2的点和综合Max的总差值。删除的点不参与无效的三位运算,并不影响结果的准确性。
2.2.4 调整计算
调整计算基于数学模型,使用现场测量的几个控制点,进行摄影测量操作所需的所有控制点(称为固定点或加密点)的调整计算(加密)。每张照片的外部方向元素,飞机跑道方法,独立模型方法是更常用的调整模型[17]。还根据加密区域进行分类,可以分为单跑道方法和区域网络方法。本研究中,PATB调整软件用于调整计算。它使用理论上最严格的自检波束调整算法,可以补偿系统误差。同时,它增加了先进实用的粗差检测算法,因此可以通过有效的粗差检测获得高精度的调整结果。在自动生成连接点之后,可以在工程区域的四个角附近准时插入几个控制点(当没有POS信息时,至少要有三个ID控制点),并且应在尽可能多的相关图像上进行准确标记使用HAT模块插入控制点时可以使用。插入控制点后,可以首先计算调整值以了解连接点的精度。如果调整是收敛的,则添加其他控制点很方便。控制点给定的值越小,表示的重量值越大,反之亦然。计算调整后,通常会编辑争议点,然后通常进行调整计算,直到没有明显的争议点的信息为止。另外,有必要在最后一次调整计算的功能中检查“通过反演计算后验方差”中的“输出后验方差”。同时,如果出现“通过自动错误检测”的检查,则可以不进行检查。在连接点没有明显的大错误点,并且可以确定控制点没有问题。
2.3 数据处理
空中三角剖分完成后,MapMatrix可以输出项目文件,在中打开创建的项目文件MapMatrix主页,立体图像对和DLG创建项目文件,并针对输电线垂直弧度创建立体图像对模型进入DLG项目文件,并对树障进行分析。 数字化DLG项目文件以打开Feature One模块,并将图形比例设置为500。上文制作的模型用于提取输电线路和树冠之间的高度和地面特征。然后使用MapMatrix的Feature One模块收集输电线和树障对象。危险要素的高程点是要素的最高点,以及每15m收集一次传输线。
3 实验结果
通过MapMatrix软件进行实验分析,并通过比对对本次实验进行精度验证。对比试验是2016年,中国能源建设集团在100 km范围内,基于可见光影像的输电线与树冠之间安全距离的测量技术进行研究,并结合了高精度的激光雷达对指定范围进行精度验证。由对比可知,本次实验所做出的输电线与树冠之间安全距离的测量满足电线运营和维护的工作要求。实验数据如表3所示。
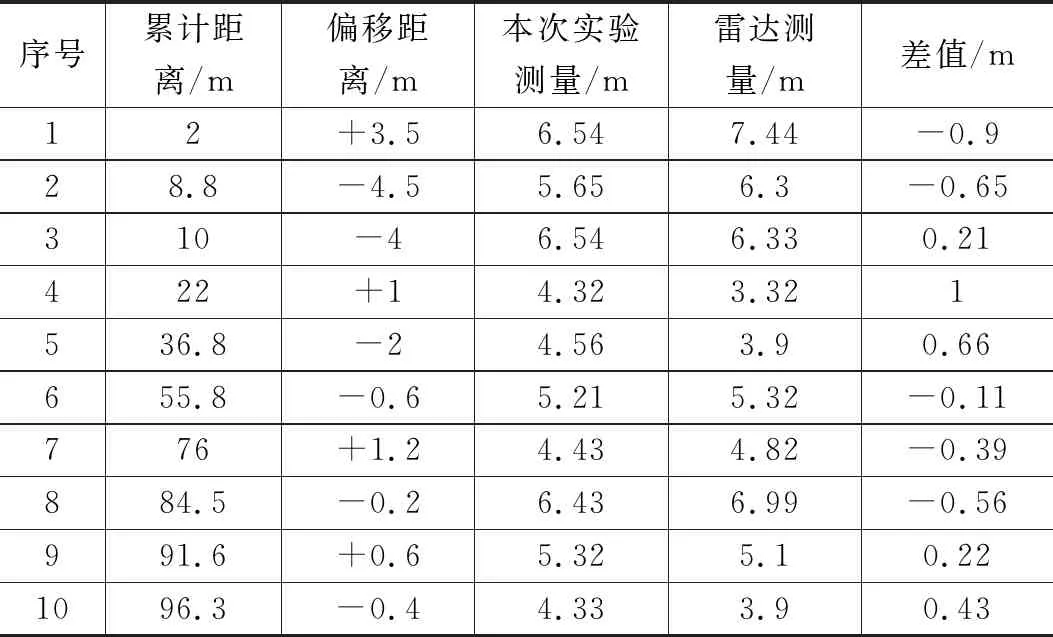
表3 实验数据距离差值
由于无人机图像采集的灵活性,实时性和低成本等优点,无人机遥感在电力巡逻中的应用越来越广泛[18]。使用可见光影像进行树障测量之间的精度取决于很多因素,例如:影像质量、连接点选取、空三解算法的数据读取精度等都会对树障测量产生影响。有效运用空三解算方法测量树障距离能够提高精度不足的问题。
4 结束语
本文建立了基于空三解算技术的树障测量技术研究,通过无人机图像采集技术获取了相关影像信息,提高了电力巡线的效率和质量。本研究针对当前电力线高度和树冠高度的净高进行分析,分析了树障安全距离,并对电力线风险进行评估。这一研究有效避免了更多树木障碍事故的发生,并且能够保障工作人员以及小区环境的安全。
猜你喜欢
电子技术与软件工程(2021年18期)2021-11-03
现代电子技术(2021年7期)2021-04-08
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
文学港(2019年5期)2019-05-24
现代商贸工业(2018年15期)2018-05-07
青年文学家(2017年28期)2017-11-28
新课程·小学(2017年8期)2017-09-20
职工法律天地·下半月(2016年3期)2017-05-23
IT经理世界(2017年4期)2017-03-25