
基于北斗导航通信技术的无人艇运动导航控制系统设计
2020-12-08 03:15:22车常昕张永波
计算机测量与控制 2020年11期
车常昕,张永波
(延安大学 物理与电子信息学院,陕西 延安 716000)
0 引言
北斗导航通信系统由用户段、地面段、空间段三部分结构共同组成,在全球范围内可为各类用户主机提供全天时、全天候的高精度定位服务,且在高水准短报文通信技术的作用下,该系统已经具备了完善的区域导航与授时定位能力,特定情况下,独立定位精度可达分米或厘米级别,平均测速精度也能达到0.2米/秒[1]。导航通信系统的空间段包含若干个地球静止轨道卫星、一个中圆地球轨道卫星和一个倾斜地球同步轨道卫星;地面段包含一个监测站、一个时间同步注入站、一个主控站和若干个地面站,且各级主机只有在星间链路运行管理设施的作用下,才能实现导航信息的传输与交流;用户段包含可兼容其它卫星的北斗导航芯片、天线、终端模块等各类基础服务型设备产品[2]。
无人艇是一种常见的海中军事武器,其应用实质就是在海中作业的行进机器人。随行进器运动时间的延长,与之相关的导航应用策略可能会出现一定程度的执行偏差,从而导致失控运动行为的出现。为避免上述情况的发生,基于惯性测量技术的导航控制系统利用ARX时间序列建模原理,确定无人艇的实际运动路线,再通过计算机动性能指标的方法,实现对行进器运动姿态的精准控制。但此系统的应用续航时间较短,很难满足核心导航主机对于无人艇运动方向的连续化精准控制需求。为解决此问题,设计基于北斗导航通信技术的无人艇运动导航控制系统,在硬件电路结构体的支持下,确定接口数据传输协议的基本应用格式,从而实现对报文加密密钥参数的设置与完善。
1 硬件电路设计
无人艇运动导航控制系统的硬件执行电路由电源模块、方位监测模块、电机测速模块几部分共同组成,通过北斗导航通信技术实现对硬件电路结构的连接与调试,由ARM Cortex-M3 STM32F103芯片和外围设备结构体共同组成中央处理单元,设置双电源结构体形式保持系统电源模块“双电压输入、单电压输入”的连接应用形式,通过以MPU6050设备实现无人艇运动姿态际方位的监测,最后通过MX1208型的双路有刷直流电路结构搭建电机驱动电路,实现电机测速。硬件电路具体搭建方法如下。
1.1 硬件电路结构组成
基于北斗导航通信技术的无人艇运动导航控制系统沿用传统模块化设计思想,以系统功能分类作为核心执行需求,自上而下地将系统结构中的独立功能部件分解出来,再按照既定导航需求进行连接与重组,从而精细化分析各功能模块的结构要素,一方面指导系统内其它硬件电路设备架构的搭建,另一方面实现对通用性电源接口执行功能的调试与维护[3-4]。硬件电路结构设计一般遵循以下原则:(1)清晰的功能区域划分,即电路模块的分解规模应适当,结构体组合要符合“结构化规则”。(2)固定的模块,即硬件电路结构的“接口规则”。(3)相关电路模块功能必须符合无人艇运动导航控制系统的测试要求,即模块化的系统“评定规则”。在后续设计过程中,结合无人艇运动导航控制系统的实际应用需求,在北斗导航通信技术的支持下,实现对硬件电路结构的连接与调试。
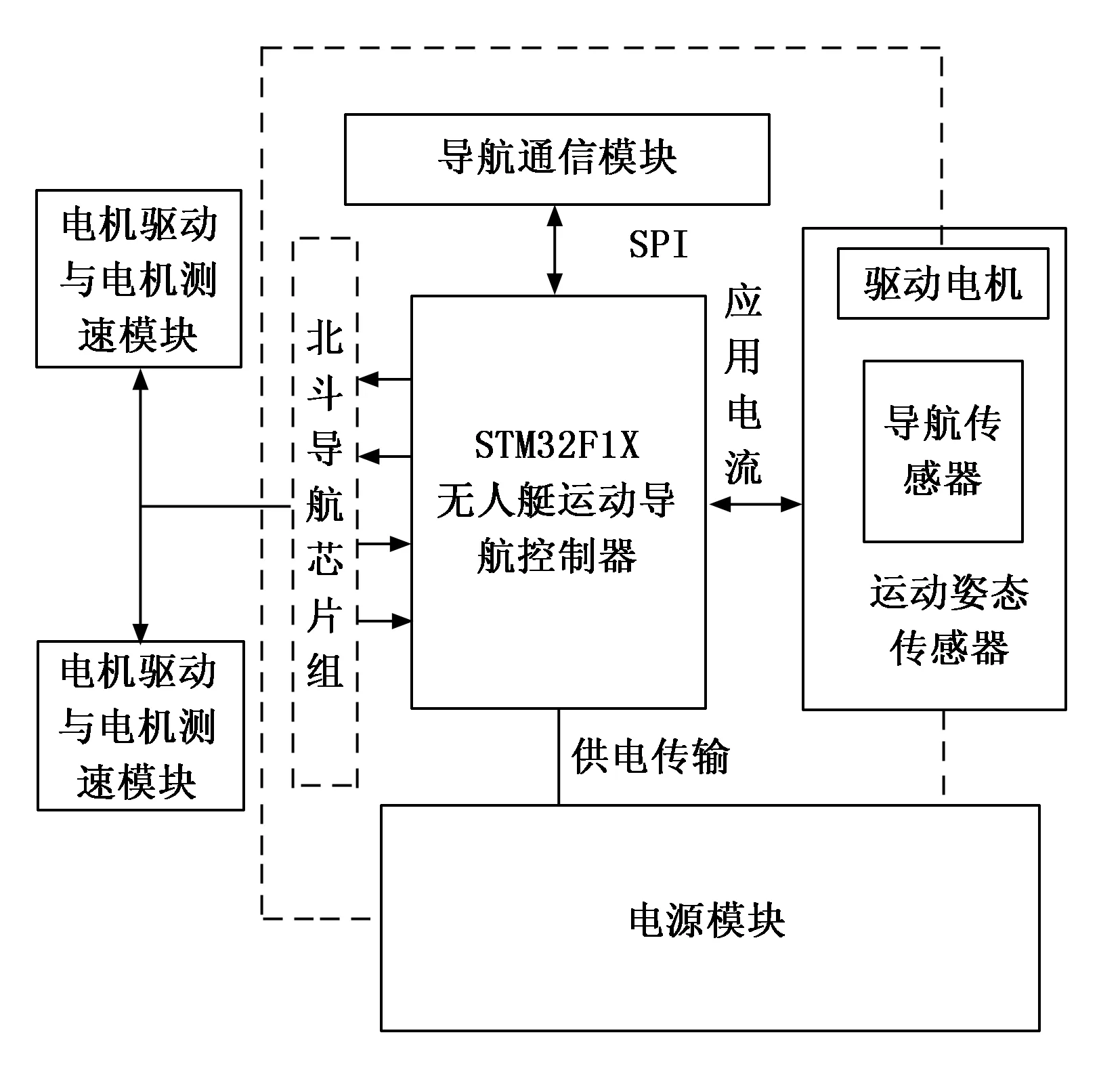
图1 无人艇运动导航控制系统硬件电路组成结构
1.2 中央处理单元与电源模块
无人艇运动导航控制系统的中央处理单元由嵌入式ARM Cortex-M3 STM32F103芯片和外围设备结构体共同组成。其中,STM32F103芯片包含内核、外设两个组成结构,前者负责对AHB、DMA、SRAM、Flash等系统总线进行集成化控制处理,并可按照北斗导航通信技术的实际处理需求,将系统电动机设备的最大运行速度提升至72 MHz/s[5]。在中央处理单元的作用下,系统电源模块始终保持“双电压输入、单电压输入”的连接应用形式,即在一次完整的无人艇运动导航控制处理流程中,始终有两个电源结构体对系统电源模块保持输入作用状态,但却只有一个电源结构体负责输出系统内的已存储应用电量。两个电压输入端分别位于U33 LMZ12003结构体两侧,在多个R0执行电阻的共同作用下,核心电源应用设备首先将输入电流转变成交变传输形式,再在线路组织的作用下,将这些流量电子暂时存储于PW1 1117-3V3设备之中[6]。随着已接入R0电阻数量级水平的提升,GND传感器两端的应用电压数值也会逐渐增大,直至系统电源模块能够完全负载中央处理单元的电量应用需求。
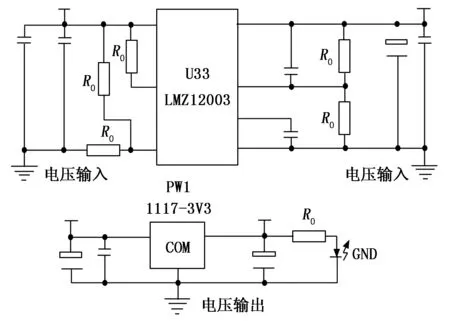
图2 无人艇运动导航控制系统的电源模块
1.3 无人艇运动姿态与方位监测模块
无人艇运动姿态与方位监测模块是具有高度集成能力的惯性测量传感器,以MPU6050设备作为核心应用元件。一般情况下,MPU6050设备结构体同时与两类传输导线相连,其中CAN总线实现了核心主机与北斗导航中心之间的连接,二总线实现了核心主机与系统检测器与控制器的连接。安装在无人艇行进器内的运动姿态测量单元可实现实时采集船体航向、翻滚、俯仰三个方向上的导航控制量,可为北斗导航通信主机提供行进运动所需的原始应用数据。但由于北斗导航中心结构的存在,MPU6050设备在使用过程中容易受到温度、噪声等多项环境因素的干扰,从而导致最终的控制精准性不断下降[7-8]。为避免上述情况的发生,MPU6050设备可根据无人艇运动角速度的变化情况,累积与北斗导航通信传输相关的物理应用信息,再在保证实际偏航角不出现明显偏差的基础上,将这些信息参量按照导航需求,传输至系统各级执行主机之中,直至无人艇终端、水下终端、地面终端三类设备元件之间的连接传输关系不再发生改变。
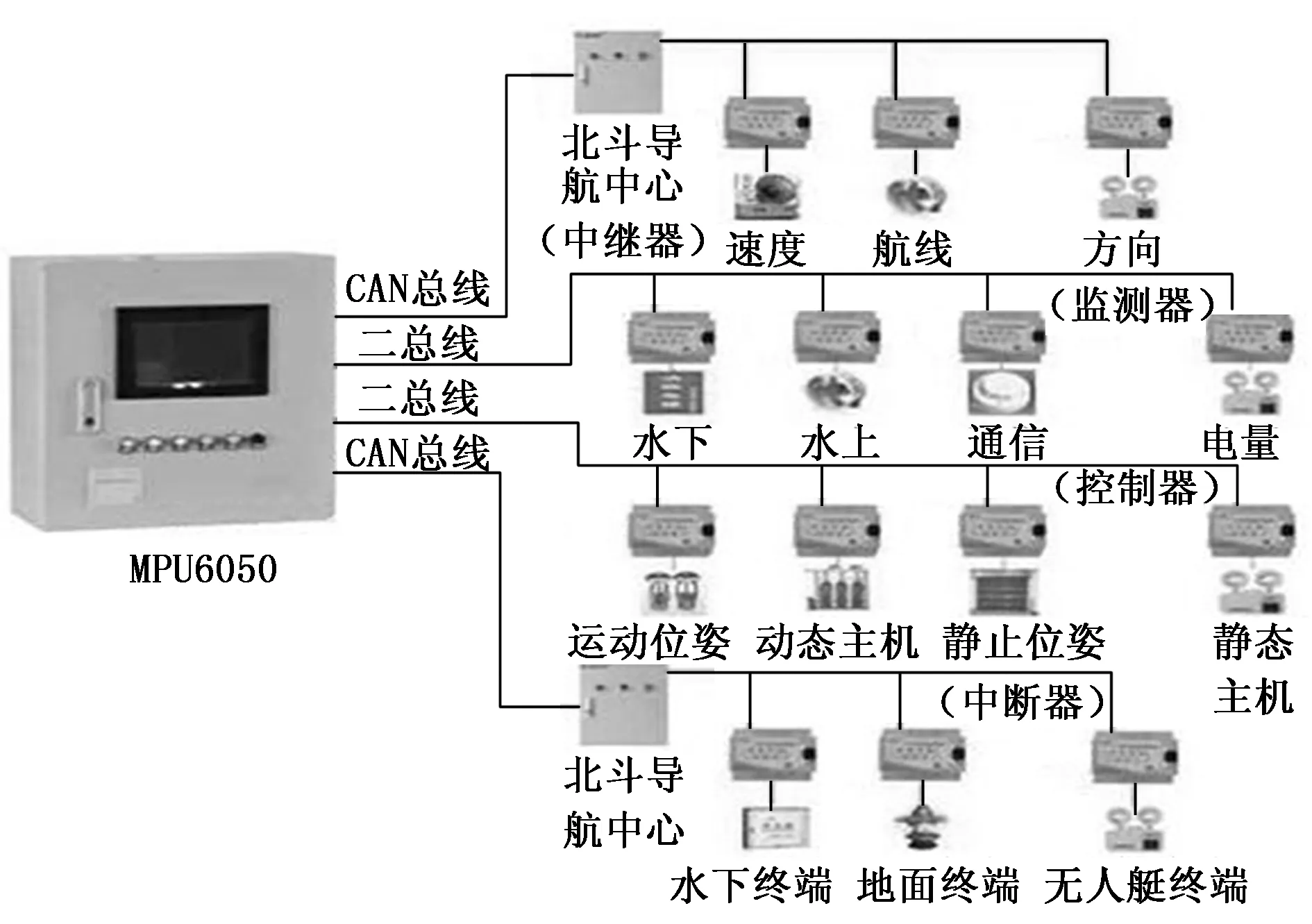
图3 无人艇运动姿态的方位监测模块
1.4 电机驱动与电机测速模块
电机驱动与电机测速模块采用MX1208型的双路有刷直流电路结构,内部集成有C类、B类两种电子驱动结构,在运转执行过程中,可根据无人艇行进器的实际运动速率,更改电路两端的承载电压数值,一般情况下,工作电压的覆盖范围可从2 V过渡到9.6 V,由于多个M电机的物理调节作用,测速模块的最大峰值输出电流始终不会超过1.5 A。MX1208驱动主机中同时存在VDD型、INA型、INB型、PGND型、PGND型等多种电子传输接口。其中,VDD1、VDD2、VCC1、VCC2接口同时存在于MX1208驱动主机上部,可在INA1、INA2、INB1、INB2接口的作用下,释放暂存于电机测速模块中的应用电子量,再借助与电源模块的连接通道,调取大量的待处理北斗导航通信数据[9-10]。PGND1、PGND2、PGND1、PGND2接口同时存在于MX1208驱动主机下部,可按照OUTA型、OUTB型接口中电流的实际输出速率,更改原接口内的电子输入量,从而实现对无人艇运动导航行进路径的精准化控制。
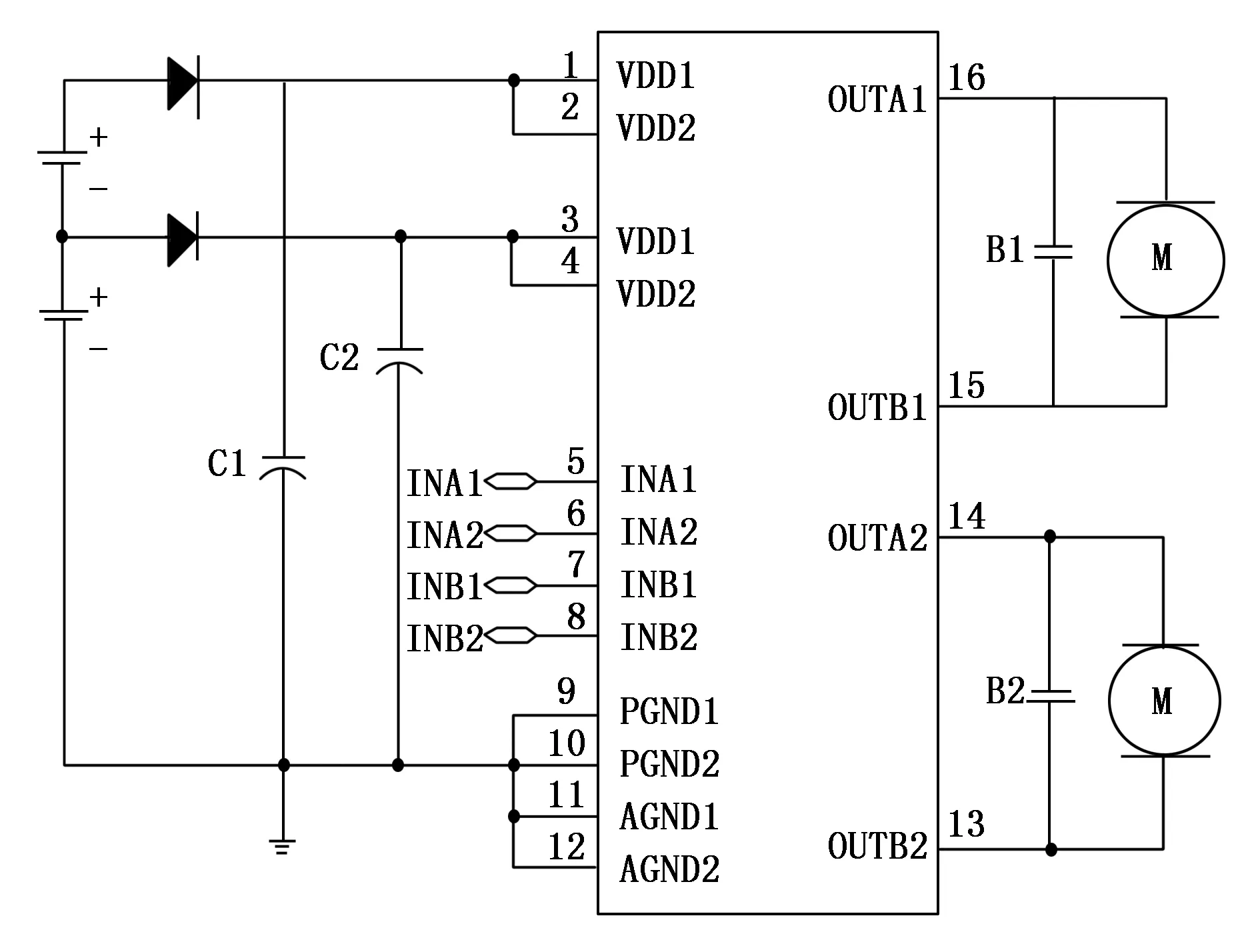
图4 电机测速模块内的驱动电路
2 基于北斗导航通信技术的系统短报文加密
在硬件电路结构体的支持下,按照短报文传输特征分析、传输协议格式定义、加密对象获取、密钥参数计算的处理流程,完成基于北斗导航通信技术的无人艇运动导航控制系统设计。
2.1 短报文传输特征
短报文传输是一类双向的简短报文通信行为,在无人艇运动导航控制系统中,用户数据长度、信息传输时间、数据编码量等都是最大的传输特征参量。结合北斗导航通信技术原理和具体数据传输路径,可将系统内的短报文传输特征总结为如下几方面。
1)无人艇运动导航短报文数据只能以明文形式进行传输:
导航短报文数据在系统各阶层间只能保持安全性传输的应用形式,同时导航控制系统的调制频率始终与导航通信数据的传输周期保持一致,在系统中导航信息属于一种公开型的资源数据,因此整个传输行为均具有较高的安全隐患等级[11]。
2)无人艇运动导航短报文数据始终保持固定的传输格式:
无人艇运动导航控制系统中的报文数据只能依照通信协议进行传输,且每条报文只具有单一的传输格式,因此无论北斗导航通信环境发生怎样的改变,报文中的数据信息结构均保持稳定。
3)无人艇运动导航控制系统的单条报文数据转发量有限
北斗导航短报文通信需要5颗GEO卫星的共同配合,虽然系统在上下行报文接收频率方面没有设备限度条件,一个导航控制主机可同时接收多个终端输出的无人艇运动报文信息,但受到卫星信道数量级水平的限制,导航控制主机需要同时建立与方位监测模块和电机测速模块的物理连接[12]。由于终端用户服务的存在,北斗短报文传输必须接受导航控制等级的限制,具体分类标准如表1所示。
2.2 接口数据传输基本协议格式
在无人艇运动导航控制系统的短报文服务中,不同的通信申请协议能够实现不同的导航控制服务,从而得到不同类型的应答信息数据。若北斗导航定位申请协议能够帮助无人艇运动目标获取当前的行进时间、经纬度等信息参量,则可认为暂存导航数据能够完全满足系统的基本传输需求[13]。一般情况下,一个完整的接口数据传输协议由指令、报文长度、用户地址、报文内容、校验和五类限制条件共同组成。
1)“指令”是指由地面导航终端发出的报文通信标志,一般以“φ”作为起始编写符号,在传输过程中,与无人艇运动导航控制信息相关的ASCII码输出形式始终保持不变,且每个ASCII码只保留一个独立的应用字节。
2)“报文长度”仅用来表示北斗导航通信报文的字节传输长度,可方便导航控制主机对当前已接收报文数据的完整度进行清晰判断。
3)“用户地址”描述了北斗导航通信报文在实际传输时的终端ID号,一般情况下其长度水平一直维持在24bit左右,绝大多数当前终端所显示的ID号只能保留在接收方地址内部,再根据目标导航地址生成独立的发送报文[14]。
4)“报文内容”包含导航传送方与导航接收方的所有用户数据信息,能够根据协议功能具体格式的不同,更改已成型报文的长度、类别及编写内容,再根据北斗导航通信技术的实用需求,将传输数据调整为字节形式,从而满足无人艇运动导航控制主机对于数据信息的补零处理需求。
5)“校验和”可对前四类条件进行总结,并以此执行所有运算指令,从而检验系统内当前运行的无人艇运动导航控制指令是否存在错误。
设B0代表指令编写系数,X0代表报文长度条件,W0代表用户地址信息,P0代表报文内容的编码实值,χ0代表校验和实值。联立上述物理量,可将接口数据传输基本协议格式的标准定义式表示为:
(1)

2.3 通信协议加密对象
北斗导航通信短报文协议的加密对象具备交互申请、顺向接收两种连接形式。其中,交互申请型通信协议加密对象在短报文用户交互过程中,可直接对申请协议中的报文内容进行加密处理,再借助输入信道,将信息反馈至接收终端,从而实现完整的信息协议获取与密文信息解密处理流程。通常情况下,这种类型加密对象的申请协议报文内容格式并不完全固定,且每部分无人艇运动导航信息所对应的物理含义也均不相同,在处理加密指令时,系统核心控制主机所需执行的协议数量相对较大,易使用户端主机出现通信混乱的处理行为[15-16]。顺向接收型通信协议加密对象可直接进入系统导航基站,当控制主机接收到足量的信号参量后,通信协议可同时转发导航信息内容与目的接收地址,随系统内累积信号总量的不断提升,最终输出协议参量的基本格式也逐渐趋于统一[17]。设θ1代表交互申请型通信协议的加密处置系数,θ2代表顺向接收型通信协议加密处置系数,联立公式(1),可将基于北斗导航通信技术的通信协议加密对象定义为:
(2)

2.4 报文加密密钥参数
为实现对无人艇运动导航短报文数据的加密处理,对密钥参数与协议加密对象间的映射关系进行分析。加密映射的建立基于一个完整的迭代分段函数,由映射公式的多次迭代处理可生成报文加密所需的密钥序列(既定密钥参数分布形式如图5所示)[18-19]。其特性本质上取决于初始运动参量d0和加密参数μ两个重要物理值,且这两个应用系数可同时看作报文加密体系中的密钥参数。其原始数学模型可表示如下:
(3)
其中:ξ代表报文加密编码原量,Nmax代表最大加密权限值,Nmin代表最小加密权限值。至此,完成各项软、硬件执行环境的搭建,在北斗导航通信技术的支持下,实现无人艇运动导航控制系统的顺利应用。
3 实验结果与分析
3.1 实验环境及原理
为验证基于北斗导航通信技术无人艇运动导航控制系统的实际应用价值,设计如下对比实验。在两艘相同的无人艇行进器中放置同型号的信号收发器,借助北斗导航通信技术实现行进器与岸基设备间的信号连接,其中实验组岸基设备搭载基于北斗导航通信技术无人艇运动导航控制系统,对照组岸基设备搭载基于惯性测量技术的导航控制系统。
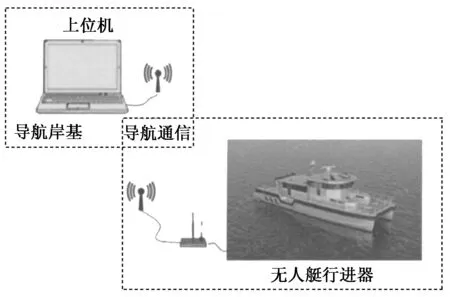
图5 导航通信控制原理
已知系统续航时间、UDI系数指标均能反映导航主机对无人艇运动方向的精准化控制能力。通常情况下,系统续航时间越长、UDI系数指标越大,导航主机对无人艇运动方向的精准化控制能力越强,反之则越弱。
3.2 结果与讨论
控制导航数据输入量分别等于1.5×108T、3.0×108T、4.5×108T、6.0×108T、7.5×108T,记录在各个数据输入水平下,实验组、对照组无人艇运动导航控制主机续航时间的具体变化情况。
分析图6可知,理想状态下无人艇运动导航控制系统的续航时间不会随数据输入量的增加而产生变化,始终保持为8 h。实验组无人艇运动导航控制系统的续航时间在小幅度下降后,开始出现明显上升的变化趋势,在整个上升过程中虽也有小幅数值下降行为出现,但对整体上升行为的影响趋势并不大,全局最大值达到18 h,与理想化数值相比,上升了10 h。对照组无人艇运动导航控制系统的续航时间一直保持下降、上升交替出现的变化趋势,最终结束数值远低于起始数值水平,全局最大值仅达到13 h,与实验组极值相比,下降了5 h。综上可知,在北斗导航通信技术的作用下,无人艇运动导航控制系统的实际续航时间出现明显增大的变化趋势,可从根本上增强导航主机对无人艇运动方向的精准化控制能力。
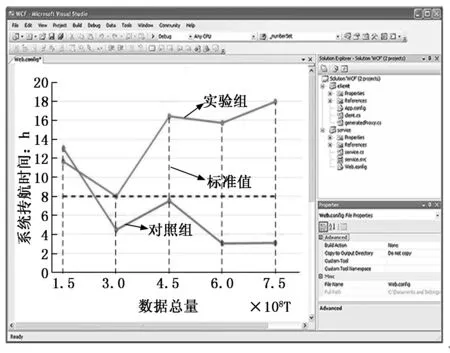
图6 系统续航时间对比图
表2记录了实验组、对照组UDI系数指标数值的具体变化情况。
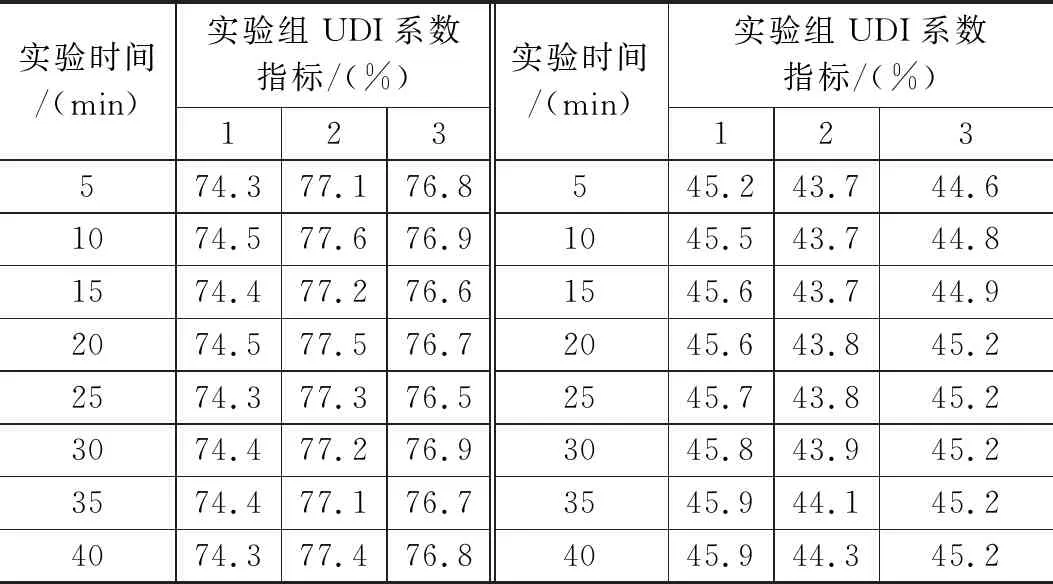
表2 UDI系数指标对比表
分析表2可知,实验组UDI系数指标的变化趋势相对较为稳定,第1组实验数值的平均水平较低,仅达到74.4%,第2组数值的平均水平较高,达到了77.3%,二者间差值为2.9%。对照组UDI系数指标的波动幅度相对较大,虽基本呈现不断增大的变化趋势,但整体上升幅度较小,第2组数值的平均水平较低,仅达到43.9%,第1组数值的平均水平较高,达到了45.7%,二者间差值为1.8%,远低于实验组数值水平。综上可知,在北斗导航通信技术的作用下,无人艇运动导航控制系统的UDI系数指标数值确实出现了明显的增大,不仅满足了导航主机对无人艇运动方向的精准化控制需求,也能够促进系统导航应用策略快速趋于完善。
4 结束语
与基于惯性测量技术的导航控制系统相比,基于北斗导航通信技术导航控制系统的实际续航时间更长、UDI系数指标数值水平更高,可使已制定导航应用策略快速趋于完善,从而加速导航主机对无人艇运动方向的精准化控制。从搭建流程的角度来看,中央处理单元与电源模块可在方位监测模块、电机测速模块的作用下,满足硬件电路结构的实际搭建需求,且随着短报文传输特征的逐渐清晰,通信协议加密对象可快速建立与加密密钥参数之间的对应关系,从而使接口数据的传输协议格式得到定向性规划,实现导航主机对无人艇行进器的运动控制与路程划分。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
汽车电器(2022年9期)2022-11-07 02:16:24
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
铁道通信信号(2020年4期)2020-09-21 09:15:24
当代陕西(2019年18期)2019-10-17 01:48:50
中国外汇(2019年11期)2019-08-27 02:06:30
成都信息工程大学学报(2017年5期)2018-01-23 02:45:38
太空探索(2016年3期)2016-07-12 09:58:47
铁道通信信号(2016年8期)2016-06-01 12:10:21
广东石油化工学院学报(2016年6期)2016-05-17 05:17:26
