
平流层飞艇载雷达跟踪HGT性能分析
2020-12-03 00:55曲智国刘宜恒
航空兵器 2020年5期
冯 耀,王 红,曲智国,李 凡,刘宜恒
(空军预警学院,武汉 430019)
0 引 言
高超声速滑翔飞行器(Hypersonic Gliding Vehicle,HGV)一般指由空气动力控制、飞行马赫数大于5、在临近空间实现远距离滑翔的飞行器,它突破了常规的弹道式飞行模式,具有较强的突防能力[1]。美俄等军事强国对HGT的研究认为,可依托现有的反导预警系统实现对HGT的探测跟踪。传统的弹道导弹防御系统开始于同步轨道的红外预警卫星,依靠导弹发射时的红外尾焰发现目标,并在导弹关机前将目标大致位置和发射方向交接给远程预警雷达,引导其对目标进行跟踪[2]。与弹道导弹不同的是,HGT的预警探测存在以下难点:第一,HGT飞行高度较低,红外预警卫星将目标交接给远程预警雷达时,预警雷达的探测性能受地球遮蔽的限制而无法发现目标;第二,HGT具有纵向跳跃和侧向偏移的机动能力,这使得预警雷达即使获知HGT关机时的发射方向也无法有效预测其轨迹。因此,迫切需要一种预警手段来辅助红外预警卫星及远程预警雷达对HGT的探测跟踪。
平流层飞艇与HGT同属临近空间,它依靠浮升气体提供净升力,通过推进系统和控制系统实现操纵飞行,能够长期工作在平流层平均风速较小的高度范围,并执行特定任务[3-6]。在平流层飞艇上搭载雷达不仅有着天然的高度优势,而且可以凭借良好的机动性能机动至边境前沿,实现前伸部署,有效提升对HGT的预警时间,为HGT的连续稳定跟踪提供了新思路和新方法。
国内外围绕HGT的跟踪问题展开大量研究,文献[7-10]对HGT滑翔段弹道特性进行了仿真分析,揭示了各运动参数之间的关系;文献[11-13]提出了一系列针对HGT高速高机动特性的机动模型和跟踪算法,从模型及算法方面有效提高了HGT的跟踪精度;文献[14-16]针对HGT巡航段轨迹预测问题,提出了基于控制律预测和基于最佳机动模型的轨迹预测算法。但公开文献中未见基于平流层飞艇载雷达的HGT跟踪问题研究。本文采用Singer模型和Kalman滤波算法分别基于地基雷达和平流层飞艇载雷达对HGT轨迹进行跟踪,并对二者的跟踪性能进行了仿真比较。
1 HGT弹道及目标视距分析
1.1 HGT弹道分析
根据控制律不同,高超声速滑翔弹的弹道可分为平衡滑翔式和跳跃滑翔式两类,一般高超声速滑翔飞行器初始运动状态难以满足平衡滑翔要求的控制律[10],在此约定本文所讨论的HGT均指跳跃式HGT。图1为HGT的跳跃滑翔弹道与其他几种弹道的比较示意图,飞行器在重力、升力和离心力的作用下沿着平衡滑翔弹道衰减振荡,形成跳跃滑翔弹道。

图1 几种弹道比较示意图Fig.1 Several trajectories comparison
由于弹道导弹的预警拦截系统较为成熟,所以当前研究多依托弹道导弹预警系统对HGT进行探测跟踪。但是由图1可知,与弹道导弹相比,HGT的飞行高度相对较低,且机动性较强。针对HGT的强机动性,研究人员提出了相应的跟踪模型和滤波算法,但是对于其飞行高度低这一探测跟踪难点,未能提出有效的解决途径。
1.2 雷达视距分析
图2为三部雷达的视距示意图,其中A雷达为地基雷达,B1雷达为与A雷达同一经纬度部署的平流层飞艇载雷达,考虑到平流层飞艇良好的机动性和当前临近空间还没有国界划分[17],在边境前沿另外部署一部艇载雷达B2。设地基雷达架高为1 km,艇载雷达架高为20 km。雷达直视距离d0(km)与雷达天线架设高度ha(m)和目标高度ht(m)有以下关系:

图2 雷达视距比较示意图Fig.2 Radar visual range comparison
(1)
由式(1)可得,架高为1 km的地基雷达对飞行高度为20 km和100 km的HGT最大探测距离分别为713 km和1 433 km;高度为20 km的平流层飞艇载雷达对飞行高度为20 km和100 km的HGT最大探测距离分别为1 165 km和1 885 km。因此,在分秒必争的反导拦截中,对于探测威力相同的地基雷达和平流层飞艇载雷达,后者能够更早地捕获HGT,进而更早地起始跟踪。
2 HGT跟踪模型及滤波算法
本文折中考虑跟踪效果和模型的复杂度,选用稳定性较强的Singer运动学模型对HGT进行建模,并采用Kalman滤波算法对HGT进行弹道跟踪。
2.1 Singer运动学模型
针对目标运动时随时会发生转弯、闪避等机动,Singer于1970年提出了著名的Singer模型[18],将机动加速度描述为时间相关的过程,假设目标加速度为指数自相关零均值随机噪声过程,其连续模型状态方程为
(2)

由于机动目标跟踪时一般使用离散的滤波器,所以需要对式(2)进行离散化处理,设系统的采样周期为T0,则离散化后的Singer模型的状态转移矩阵F为[19]
(3)
连续模型状态方程离散化后的过程噪声方差为
(4)
式中:
(5)
2.2 Kalman滤波算法
卡尔曼滤波器利用前一时刻对当前时刻的预测值和当前时刻的量测值来更新对状态变量的估计,获得当前时刻的滤波值,通过“预测—更新”实现递归滤波[20]。
假设线性离散系统的状态方程和量测方程如下:

(6)
式中:x(k)是待估计量;z(k)是通过雷达测得的量测数据;F(k)为过程矩阵,表示状态变换的关系;ω(k)为过程噪声;C(k)为测量矩阵;ν(k)为测量噪声。假设ω(k)和ν(k)为零均值、不相关白噪声,其协方差矩阵分别为Q(k)和R(k),即

(7)
在递归滤波之前需要对Kalman滤波器的状态估计值及状态估计方差进行初始化,即

(8)
Kalman滤波算法的具体实现步骤如下:
(9)
3 仿真分析
将地基雷达A部署于E110°N45°,架设高度为1 km,与地基雷达相同经纬度的位置部署一部平流层飞艇载雷达B1,另外在E110°N50°处前沿部署一部平流层飞艇载雷达B2,两架飞艇高度均为20 km。三部雷达参数设置相同:最大探测距离为3 000 km,距离误差为100 m、方位角和俯仰角误差为0.001 rad。Singer模型的机动频率设置为0.05。
3.1 实验一
参考美国洛克希德·马丁公司设计的CAV-H模型设置飞行器的基本参数[21]:质量m=900 kg,空气动力参考面积S=0.48 m2,热流密度、动压、过载的约束分别为6 000 kW/m2、45 kPa和4,假设飞行器保持固定的攻角和倾侧角飞行,取最大升阻比下的攻角值α=11.6°,倾侧角φv=0°。采用指数型大气模型[22],仿真时间t=700 s。设飞行器滑翔段初始运动状态的飞行马赫速度为15,初始位置为E110°N78°,飞行高度为80 km,航迹倾角为0°,航迹方位角为180°。
3.1.1 三部雷达视距与目标距离仿真分析
分别仿真A,B1和B2三部雷达的直视距离与目标距离,如图3所示,只有目标距离小于雷达直视距离时才能够探测到目标。将图3(a)与图3(b)~(c)进行对比可得,对于相同飞行高度的目标,平流层飞艇载雷达比地基雷达多出500 km左右的直视距离优势。由图3(a)可知,HGT飞行618 s后出现在地基雷达A的视距范围内,此时目标距离为880 km;由图3(b)可知,HGT飞行458 s后出现在艇载雷达B1的视距范围内,此时目标距离为1 530 km;由图3(c)可知,HGT飞行314 s后出现在艇载雷达B2的视距范围内,此时目标距离为1 610 km。在700 s的仿真时间内,艇载雷达B1对HGT的跟踪持续时间大约是地基雷达A跟踪时间的3倍,艇载雷达B2对HGT的跟踪持续时间大约是地基雷达A跟踪时间的5倍,所以相对于地基雷达而言,平流层飞艇载雷达可以更早地探测到目标并起始跟踪,为拦截系统提供更充足的目标信息。

图3 三部雷达的视距与目标距离仿真Fig.3 Visual range and target distance simulation of three radars
3.1.2 三部雷达跟踪精度比较及分析
以3.1.1中目标进入三部雷达视距的时间作为跟踪起始时间,运用Singer模型和Kalman滤波算法分别对三部雷达下的HGT轨迹进行跟踪,蒙特卡洛仿真次数为100次,跟踪效果以均方根误差(Root Mean Square Error,RMSE)来评价[23]。三部雷达的位置RMSE及速度RMSE分别如图4~5所示。
由图4可知,三部雷达在跟踪起始阶段均有较大的位置跟踪误差,而后会逐渐收敛,其中前沿部署的平流层飞艇载雷达B2对HGT的跟踪持续时间最长,且位置RMSE一直比其他两部雷达的位置RMSE低,一方面是因为跟踪时间越长,跟踪精度越容易收敛至一个比较小的量级,另一方面是因为艇载雷达B2的目标距离一直小于其他两部雷达的目标距离。由图5可知,与位置跟踪精度类似,三部雷达在起始跟踪的很短一段时间内,速度跟踪精度很差,而后都会趋于收敛。其中,平流层飞艇载雷达B2的速度RMSE一直比其他两部雷达的速度RMSE低,可实现对HGT速度的长时间稳定精确跟踪。

图4 三部雷达的位置RMSE比较Fig.4 Comparison of position RMSE of three radars

图5 三部雷达的速度RMSE比较Fig.5 Comparison of speed RMSE of three radars
由实验一可以得出结论:同一经纬度部署的地基雷达与艇载雷达跟踪精度相差不大,前沿部署的平流层飞艇载雷达能够获得更长的跟踪时间和更高的跟踪精度,所以在实战运用中,可以根据HGT的来袭方向前沿部署平流层飞艇载雷达,为反导拦截系统更早地提供更精确的HGT轨迹信息。
3.2 实验二
地基雷达对HGT进行探测时,目标滑翔段的纵向跳跃很可能造成小部分轨迹被地球遮挡,从而导致情报中断,文献[14-16]提出了针对这种被地平面遮挡轨迹的预测补偿算法,且算法具有较高的预测精度。实验二就是为了比较这种情况下,地基雷达与平流层飞艇载雷达的跟踪性能。飞行器参数设置同实验一,飞行器滑翔段初始运动状态的飞行马赫速度为15,初始位置为E143°N58°,飞行高度为80 km,航迹倾角为0°,航迹方位角为-90°。
3.2.1 两部雷达视距与目标距离仿真
采用部署于同一经纬度的地基雷达A和平流层飞艇载雷达B1对HGT进行探测跟踪,首先仿真得到两部雷达直视距离与目标距离之间的关系,如图6~7所示。
由图6可知,HGT飞行430 s后出现在地基雷达A的视距范围内,随着目标的跳跃滑翔飞行,在580 s时由于目标跳跃至地基雷达视距线以下,造成雷达失跟、情报中断,到640 s时目标又跃起至雷达视距线以上,雷达重新发现目标并开始跟踪。

图6 地基雷达A的视距与目标距离仿真Fig.6 Visual range and target distance simulation of ground-based radar A
由图7可知,平流层飞艇载雷达由于天然的视距优势,在HGT飞行230 s即发现目标,且目标能够一直保持在其视距范围内,可实现HGT的连续稳定跟踪。
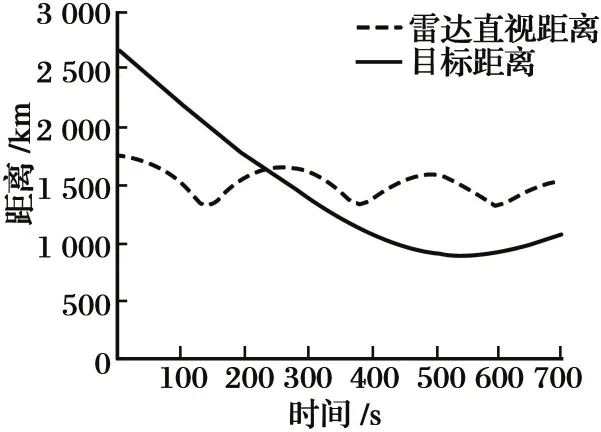
图7 艇载雷达B1的视距与目标距离仿真Fig.7 Visual range and target distance simulation of ship-based radar B1
3.2.2 两部雷达跟踪精度比较及分析
以3.2.1中目标进入两部雷达视距的时间作为跟踪起始时间,运用Singer模型和Kalman滤波算法分别对两部雷达能够探测到的HGT轨迹进行跟踪,蒙特卡洛仿真次数为100次。对于图6中580~640 s地基雷达丢失的这部分轨迹,参考文献[14],基于HGT跳跃滑翔的控制律具有一定的规律性,对后续控制参量进行预测,从而达到轨迹预测的目的。跟踪及预测效果均以RMSE来评价。两部雷达的位置RMSE如图8所示。

图8 雷达A与雷达B1的位置RMSE比较Fig.8 Comparison of position RMSE between radar A and radar B1
由图8可得,地基雷达A于430 s开始对HGT进行跟踪,跟踪精度逐渐收敛并趋于稳定,在持续跟踪150 s后目标从地基雷达视线消失,而后雷达基于前面150 s的跟踪数据对HGT的轨迹进行预测,预测精度如图中红色虚线所示。可以看出预测位置RMSE近似为线性增大,640 s时预测位置RMSE增大至1 300 m,如此大的预测位置RMSE除了受预测算法本身局限外,还因为此时的HGT轨迹是其跳跃点,跳跃点的强机动性增加了轨迹预测的难度。HGT飞行640 s时重新出现在雷达视距范围,地基雷达跟踪精度重新经历一个短暂的收敛过程并趋于稳定。艇载雷达B1于230 s开始对HGT进行跟踪,跟踪精度逐渐收敛并趋于稳定,可明显看出在目标从地基雷达视线消失期间,艇载雷达仍然能够稳定跟踪目标,跟踪精度远高于地基雷达的预测精度。
另外,地基雷达探测HGT时,被地平线遮挡的轨迹段大多处于其跳跃点左右,这对轨迹预测算法的适用性提出了更加严格的要求。对于相同的HGT轨迹,与地基雷达同一经纬度部署的平流层飞艇载雷达凭借其视距优势,不会因为HGT的纵向跳跃而丢失目标,能够实现HGT的长时间连续稳定跟踪。
4 结 束 语
随着美俄等军事强国多型高超声速滑翔飞行器的试验成功,构建有效的预警体系显得十分迫切。平流层飞艇载雷达对HGT的探测跟踪有着独特优势,是红外预警卫星与远程预警雷达探测跟踪HGT的有效辅助手段。本文首先对HGT弹道及雷达视距进行了分析,然后基于Singer模型和Kalman滤波算法建立了平流层飞艇载雷达跟踪HGT的数学模型,最后仿真比较了平流层飞艇载雷达与地基雷达对HGT的跟踪性能。结果表明,平流层飞艇载雷达前沿部署时,跟踪精度要优于地基雷达,且在地基雷达下的HGT轨迹被部分遮挡而需要进行预测时,平流层飞艇载雷达能够连续无间断地跟踪目标,且跟踪精度优于地基雷达的预测精度。研究结果证明了平流层飞艇载雷达跟踪HGT的稳定性和精确性,为更好地发挥平流层飞艇载雷达探测跟踪HGT的作战效能提供一定的参考意义。
猜你喜欢
大自然探索(2022年7期)2022-08-26
北方交通(2022年6期)2022-06-18
北京航空航天大学学报(2022年5期)2022-06-06
大气科学学报(2022年2期)2022-05-12
中国计算机报(2020年9期)2020-03-25
现代农业科技(2019年8期)2019-09-06
环球时报(2019-08-20)2019-08-20
科技视界(2018年8期)2018-06-08
琴童(2018年1期)2018-03-26
居业(2017年5期)2017-07-24
