影响低空无人机航测露天矿地质成图精度的因素分析
2020-11-30 06:12魏亚峰
世界有色金属 2020年18期
魏亚峰
(河北省煤田地质局第二地质队,河北 邢台 054000)
因为地理信息数据的变换比较频繁,诸多大型建设工程均需要及时更新数据信息,而测绘工作在技术性的高要求,生产规范方面的严格,所以导致地理数据的采集周期比较长,成本偏高。优化测绘方法,提升测绘作业效率,降低成本,已发展为现实生活中我们急需解决的重要问题。传统的无人机航测,一般会受到空域申请、航摄时长等因素的影响,在快速回应和大面积精准测绘中是无法满足行业要求的。低空无人机航测具备一系列优势,如机动灵活、方便有效、成本低廉、时间短等优势,这就使其发展了传统航测[1]。现今为止,伴随航空技术的迅速发展,无人机逐步被推广应用,通过无人机对影像资料进行及时的采集,会大幅度降低航拍的作业难度。另外一方面,无人机飞行高度偏低的话,可以采取性价比比较高的数码相机,其也可以满足测绘数据的要求,所以就能够在很大程度上降低工作难度和运营成本,可是因为无人机在飞行时很难保证其姿态的稳定性,利用的相机发生畸变的可能性比较大等问题,怎样确保测绘产品最终的精度,就需要我们进行有关的研究和实践。
1 无人机航测高度对露天矿地质成图精度的影响
无人机航测的高度对露天矿地质成图成图精度具备非常重要的影响,高度直接和低空无人机航测过程中获取的影像像素之间存在极其紧密的联系,同时高度在上下方向的变动还和影像相幅大小之间存在一定的关联。一般状况下,低空无人机在实际飞行中,高度是作为一个从低至高的变化过程,在获取影像的作业中,像素值实际上是一个从大至小的过程。另外,露天矿地质成图图像精度也会随之降低,这就要求在低空无人机的航测中,有关技术人员必须充分考虑到低空无人机航测露天矿的地形状况,科学确定其飞行高度,进一步保证地质成图的精度。
2 相机像素的影响
相机作为测量工具的一种,其自身像素的大小会直接影响到成图的质量,像素越大,图像越发清楚,像素越小,图像就越模糊,所以在无人机起飞时,必须充分考虑到相机自带的像素对飞行高度进行初步确定。相机聚焦和曝光时间的长短很大程度上也会影响到最终的成图精度,所以准备工作中也需要对相机进行聚焦,飞行高度设定为500m时,就必须寻找到一个500m的地标物进行对焦。曝光时间的选择主要是和能见度相关,光线不佳时,需要尽可能延长曝光时间。数码相机自身就存在畸变的可能性,这会大大影响到成图的精度,因此航测时必须对其进行有关的参数检校,使其方位值和畸变参数保持统一。一般,绝大部分情况下是采取低空无人机数据后处理软件对相机进行自我检校处理。
3 像片倾角的影响
通常情况下,一个地面设置点在上下两张相片上,会构成纵点坐标,其差值一般称之为上下视差值,标准立体相对影像的上下视差值常规情况下是0。一个地面设置点在左、右两张相片上,会构成横点坐标,其差值一般称之为左右视差值,标准立体相对影像的左右视差值常规情况下也是0。两个地面设置点的左右视差之差即为左右视差较值,左右视差比较值是由两个像素点之间的实际高度误差造成的[2]。左右视差值可以借助理想相对影像间的左右视差比较值来表示,从而将其优化为理想相对影像的上下视差比较值。
4 像控点设置的影响
在低空无人机对露天矿进行航测的实际拍摄过程中,像控点的设置会导致最终成图精度受到很大程度的影响,选取适宜的像控点,能够有效提高最终的地质成图精度,否则就会降低成图质量。
无人机航测在准备环节,就必须合理设定像控点,并保证像控点的布防数目实际应超过6个。因为地形地貌的起伏变化比较大以及植被覆盖率比较高的时候,像控点非常容易被其部分或完全覆盖,进而导致低空无人机的航测工作很难开展下去,造成成图翘曲的出现,且同时伴随着获取到的航测数据在精度上不满足要求,影响到航测的最终成图精度。所以,一旦遭遇到地形比较复杂多样的航测任务,就必须全面分析露天矿的实际地形。
5 无人机飞行姿态的影响
无人机的飞行姿态在很大意义上会对最终的航测成图精度产生不良影响:通常,飞行方向的倾斜角度会对高程产生误差影响。这是因为一旦飞行方向出现变化,会影响图像的幅值;而实际作业过程中,获取的立体图像出现偏差主要是由于偏向倾斜和正向倾斜在图像上的叠加,造成图像上出现一个双面曲线抛物线。
飞行姿态具体包括飞机航测作业时的俯角、仰角、横角、滚角以及偏角,简而言之,航测地质影响成图的飞行姿态主要是和无人机的飞行状态、当时环境下的风速、风力等有着莫大的关联。在飞行器稳定性表现较佳的前提下,影响因素最大的即为风。起风时,会造成飞机为了有效抵达风的影响而作随之作出恰当的反应,飞机姿态就会产生一定程度的变动,特别是当风向复杂的状况下,飞机姿态变得更加不稳定。如此极易导致航低空拍摄影像时因为拍摄姿态角过大而造成影像重叠度过低、影像匹配失败率过高、航摄漏洞过多或连接性不强等问题。同时因为拍摄姿态角太大,非常容易导致最后的航拍影像出现畸变更大,由此带来最后成图模型质量较差[3]。低空无人机在航测露天矿地质成图应用过程中,避免在风速过大或风向复杂的天气下拍摄。
6 相机放置方式的影响
为了进一步研究相机摆放位置对地质成图成像精度的影响,这里设定以数码相机CCD阵面为矩形阵面,为了统一计算,假定CCD矩形阵面的基本像素是5616×3774,像元尺寸一般是6.4um,初始焦距设为35.5093mm,航拍相机的飞行比例尺为1∶23533;同时假设低空拍摄时像素之间的重叠度为70%,那么就能够按照图1所示的立体观测误差示意图获取到影像基线的长度与像点相交角,他们分别为:

上式,Lx代表航测影像片幅面的基本宽度,θ代表像元,f代表飞行角度,b代表比例尺。一般状况下,为了利于统计,可在对基本航向方向进行测量时,假设作业人员的左右视差误差值大概是像元的1/3。假若以来代表视差误差值,那就可以获得由于人为测量误差而出现的平面误差Δx和高程误差Δh:

式中,m代表航拍比例尺分数的分母。通过计算可知,测得的平面精度和比例尺之间为正比相关,和CCD阵面的摆放位置没有关联;CCD阵面的长边和飞行方向垂直时的高程精度要比短边和飞行方向垂直时的高程精度要高一些,这就代表当对矿区进行大范围航测时,CCD阵面的长边和飞行方向垂直时的获得的地质作图要更为精良。
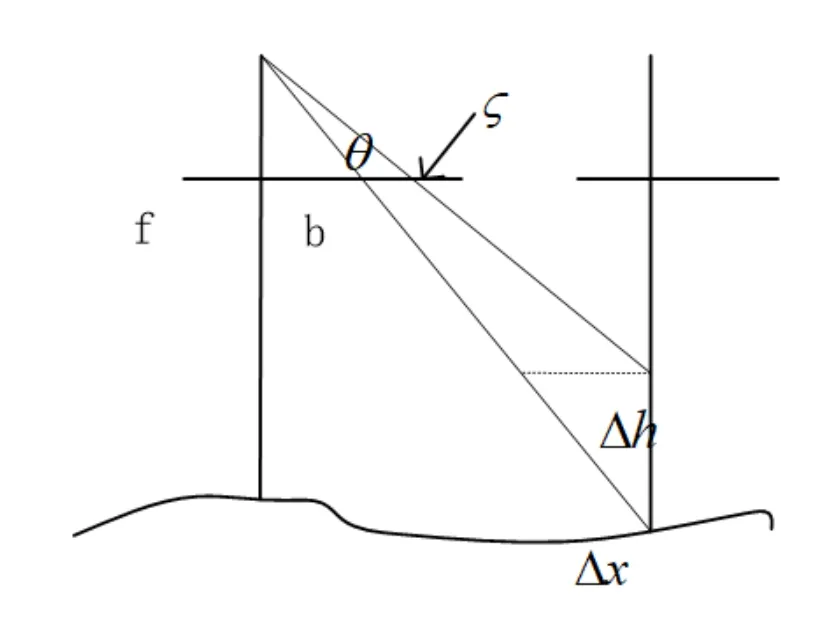
图1 立体观测误差示意图
7 无人机平台的影响
无人机航测一般需要搭载非量测型单反设备,其像幅比较小,为了能够获取露天矿整体地质图像,我们可借用改变航向和旁向重叠度的方法,但使用该方法会造成整个航测矿区影像数目的叠加,通常会对测量作业产生一定影响。近年来,国内低空无人机航测技术不管是在实用性还是在稳定性上均有着长足进步,其技术上的改进和创新势必可以提高航测成图的质量,有效记录飞机在航拍时拍摄的各项数据,并利用后期专业软件对其进行完善加工,进一步保证计算的准确性,如此一来就可以在很大程度上避免低空无人机平台对航测数据准确度的不良影响。
8 结语
本文对影响低空无人机航测露天矿地质成图精度的因素进行分析,低空无人机航测技术拥有一系列使用优势,如实用性、综合性强等特点,伴随以后我国科学技术的继续发展,无人机航测技术势必会改良诸多缺陷,逐步克服影响成图精度的不利因素,从而有效实现了我国航测技术的迅猛发展,待其功能完善以后,广泛应用在社会诸多行业。低空无人机航测技术很大程度上克服了传统测量方法的缺陷,使其测量精度进一步提升,可以在一定程度上满足矿山等工程测量的一系列技术要求。希望本文对影响低空无人机航测露天矿地质成图精度的因素的相关研究可以为航测技术的发展提供一定的理论依据。
猜你喜欢
计算机应用与软件(2022年1期)2022-01-28
小型微型计算机系统(2022年1期)2022-01-21
有色金属(矿山部分)(2021年4期)2021-08-30
有色金属(矿山部分)(2021年4期)2021-08-30
电子乐园·上旬刊(2021年8期)2021-05-16
军民两用技术与产品(2021年10期)2021-03-16
计算机与数字工程(2020年11期)2020-12-23
疯狂英语·新悦读(2020年6期)2020-06-28
北京航空航天大学学报(2017年9期)2017-12-18
南方文学(2016年3期)2016-06-12