
风力发电机振动的多普勒激光雷达遥测技术
2020-11-24 01:42石家祥宋小全吴松华戚一麟陈清源张凯临
光学精密工程 2020年10期
石家祥,宋小全,2,吴松华,2,戚一麟,陈清源,张凯临*
(1.中国海洋大学 信息科学与工程学院 海洋技术系,山东 青岛 266100;2.青岛海洋科学与技术试点国家实验室 区域海洋动力学与数值模拟功能实验室,山东 青岛 266237;3.青岛镭测创芯科技有限公司,山东 青岛 266101)
1 引 言
我国风能资源分布广阔,风电技术相对成熟且对我国能源结构与减排降污至关重要。近年来,随着风电场装机容量的大幅增加,风力发电机运行监测和故障检修的难度在逐年提升,各种事故造成的损失难以承受,可靠的状态监测和故障分析技术是机组正常运行的必要保障[1]。目前,风力发电机的状态监测和故障分析方法主要有五种:传感器检测法、红外热成像检测法、声发射检测法、超声波检测法和无人机巡检法。传感器检测法是通过预先在风机重要部位安装传感器,根据传感器反馈信息判断风机是否出现异常,从而达到对风机故障进行预测和诊断的目的[2]。红外热成像法是利用外加热源对风机进行热激励,激励源产生的热量会在目标物表面扩散并形成温度场,热成像仪器采集图像并进行处理,进而获得风机表面的状态信息[3]。声发射检测法是一种遥测法,这种方法通过检测风力发电机内部结构断裂产生的应变波来判断是否发生异常情况[4]。超声波检测法通过检测风力发电机叶片结构缺陷造成超声波传播路径的变化,进而获得缺陷信息,这种方法可用于检测风力发电机表面或内部缺陷[5]。无人机巡检法通常是由无人机携带光学检测仪器对风力发电机进行摄影,通过对图像进行后期处理获得风力发电机的状态信息[6-7]。
随着激光雷达整体性能的提升,它在风电领域的应用也逐渐成熟,可以用于风场湍流测量[8]、风机尾流测量[9]、风机偏航控制[10]、风场风廓线测定[11]、风机功率曲线验证[12]、风场低空风切变测量[13]等。按照安装位置,激光雷达遥测可分为陆基式(或称地基式)、海基式和舱基式(或称机舱式)三类。陆基式通常直接安装在地面[14];海基式通常会安装在舰船、浮筒或海上固定平台[15-16];舱基式的安装位置为风力发电机机舱上方或整流罩内[17]。国外涉及到风电领域的商品化激光雷达主要有法国ZephIR公司的ZephIR 300、ZephIR 300M、ZephIR DM;法国 LEOSPHERE 公司的WindCube V2、WindIris、WindCube 100S/200S;英国SgurrEnergy公司的Galion G250与Galion G4000。国内主要有南京牧镭激光科技有限公司的Molas B300、Molas NL、Molas M300等;青岛镭测创芯科技有限公司的WindHorizon H400、WindMast WP350等,以及首台国产海上漂浮式测风激光雷达WindMast 350-MB。
由于风力发电机的振动有高频和低频之分,在遭遇强风等瞬态冲击载荷事件时,机体会形成类似于扭动的低频振动[18],受数据更新频率的限制,激光雷达更适合对低频振动进行探测。激光雷达的遥测方法在拥有传统遥测方法优势的同时,受地形和操作人员水平的限制更小。在激光雷达性能快速提升的前提下,风力发电机振动的多普勒激光雷达遥测技术展现出良好的实际应用价值。
本文采用合理的遥测方式与数据处理方法,利用多普勒激光雷达系统实现了风力发电机低频振动的远距离测量,获取了风力发电机的振动速度及振动频率等信息。
2 多普勒激光雷达系统及遥测原理
2.1 多普勒激光雷达系统
试验中使用的激光雷达型号为Wind3D 6000,这是一种由中国海洋大学与青岛镭测创芯科技有限公司联合研制的多普勒激光雷达。它利用光学拍频原理实现多普勒效应的探测,利用脉冲测距原理实现距离测量[19],具有速度分辨率高、灵敏度高等优势[20]。
Wind3D 6000带有伺服系统,具有地面以上全方位探测的能力,扫描模式包括PPI、RHI等[21],还可根据需要自行设定扫描模式。图1为Wind3D 6000激光雷达。

图1 Wind3D 6000激光雷达Fig.1 Photo of Wind3D 6000 lidar
Wind3D 6000系统的种子源选用的是分布反馈式掺铒光纤激光器(Distributed Feedback Er+Dopted Fiber Laser,DFB-EDFL),激光波长为1 550 nm,属于近红外波段[22]。最大径向数据更新率为10 Hz,根据奈奎斯特采样定律,可对5 Hz以下的低频振动进行探测。速度探测范围约为-37.5~37.5 m/s,对大气目标的探测距离为45~6 000 m,测速精度为0.1 m/s,当用于探测风力发电机时,由于回波信号的信噪比会有较大提升以及增加了离散频谱校正,其测量精度得到进一步的提高。表1为激光雷达系统的性能指标。
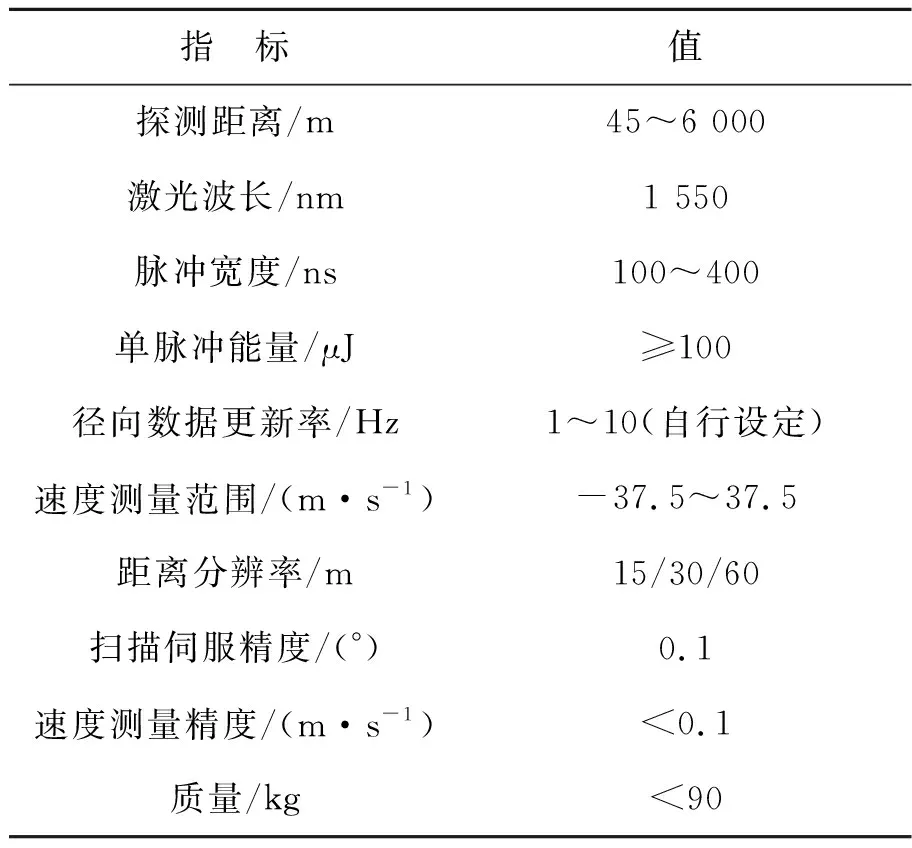
表1 激光雷达系统的性能指标
2.2 风机振动的多普勒激光雷达遥测原理
风力发电机各部位常见的低频振动形式通常有4种:(1)叶片的左右摆动;(2)塔筒(塔架)的左右摆动;(3)叶片的前后摆动;(4)塔筒(塔架)的前后摆动[23]。图2为风力发电机低频振动示意图。本文在试验过程中,使用激光雷达对风力发电机塔筒的振动进行了探测,获得了风力发电机在激光光束方向的径向振动信息。
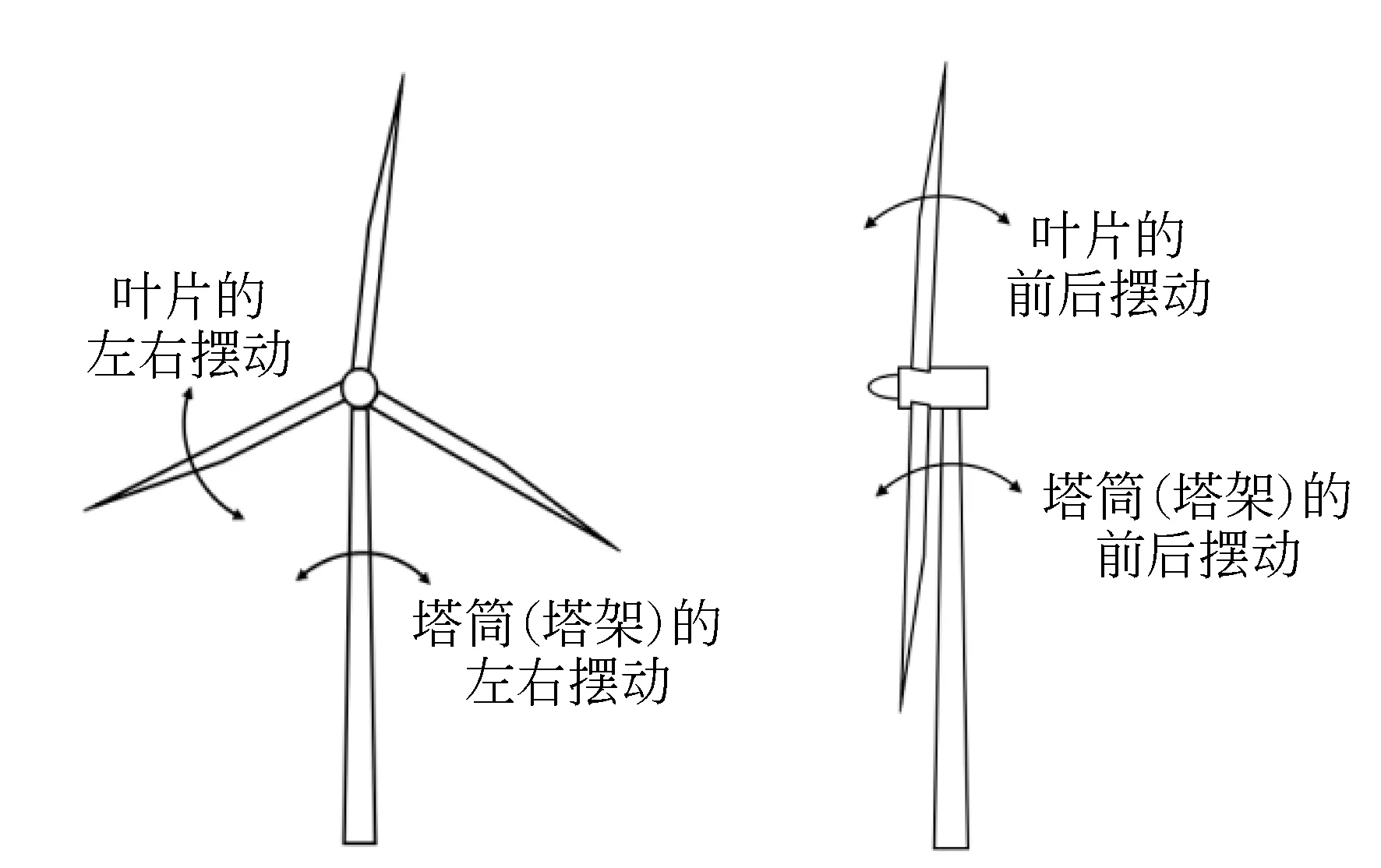
图2 风力发电机低频振动示意图Fig.2 Schematic diagram of wind turbine in low-frequency vibration
当激光光束照射在风力发电机表面时,风力发电机振动产生的多普勒效应使激光频率发生变化,通过检测频率的变化量获得对应的振动速度。假设风机振动方向与激光视线方向的夹角为θ,出射激光的波长为λ,则风机振动速度v与多普勒频移Δf的关系为:
(1)
当风力发电机塔筒静止或其运动方向与激光光束方向垂直时,激光雷达测得的径向振动速度为0;当风力发电机运动方向与激光光束不垂直、有夹角时,定义远离激光雷达的径向振动速度为正值,朝向激光雷达的径向振动速度为负值。
图3为激光雷达测振系统原理。系统的种子激光器发射的线偏振光经由分束器分为出射光和本振光,假设中心频率均为f。声光调制器(Acousto-Optic Modulator,AOM)将出射激光经调制为中心频率为f+fL的脉冲光,再经由光纤放大器、光开关和光学天线望远镜,最终照射在风力发电机表面。假设风力发电机振动造成的多普勒频移为fD(激光视线方向),则激光雷达接收到的信号光频率变为f+fL+fD。信号光与本振光通过光纤耦合器后形成拍频信号,经由光电平衡探测器后变为中心频率为fD+fL的模拟信号。ADC(Analog-to-Digital Converter,模拟数字转换器)将模拟信号转换为数字信号,此时的数字信号为时域信号。
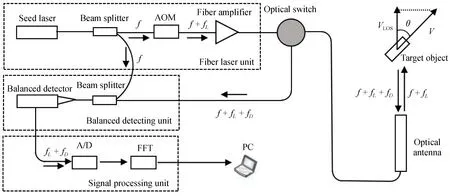
图3 激光雷达测振系统原理Fig.3 Schematic diagram of lidar system for vibration measurement
3 测振频谱数据处理
3.1 处理方法概述
在进行风机振动的遥测试验时,为了获得不同距离对应的多普勒频移量,需要将时域信号按照距离划分距离门(或称距离库),每个距离门内的时域信号单独进行FFT获得频域信号,检测出不同距离门的多普勒频移量。
在时域信号处理过程中,以15 m为一个距离门对时域信号进行1 024个点的FFT得到频域信号,对应的激光雷达距离分辨率即为15 m。在得到每个距离门的频域信号后,每个距离门取100个采样点,得到重组后的频谱数据(离散的频率谱数据)。
由于FFT产生的栅栏效应会造成PC端接收到的频谱数据产生较大的误差[24],因此需要对测振频谱数据进行处理。本文介绍了一种以离散频谱校正技术为核心的测振频谱数据处理方法,其步骤为:频谱数据预处理、风机位置搜寻、离散频谱校正和振动信息提取。
3.2 频谱数据预处理
激光雷达系统的出射激光经由光纤端面以及光学天线镜面时,介质变化会导致菲涅尔反射,其反射信号强度远高于大气后向散射或风机的反射信号强度。实际测量中,菲涅尔反射会影响约前6~8个距离门的谱数据。若风力发电机距离激光雷达较远,可采用直接剔除前6~8个距离门数据的方式来消除菲涅尔反射的影响。
消除菲涅尔反射的影响后,需要进行本底噪声的抑制与扣除。由于激光雷达远端的大气后向散射信号强度极低,通常选取远端数个距离门信号求平均,以平均值作为本底噪声,然后对其他数据相应扣除本底噪声。
3.3 风机位置搜寻
试验中,在相同的距离下,风力发电机作为一种硬靶目标,其反射率远大于相同距离下气溶胶的后向散射系数。图4为回波信号强度,图中每100个点代表一个距离门,第36~42个距离门即风力发电机形成的谱数据信号,其强度陡增几百倍甚至上千倍。
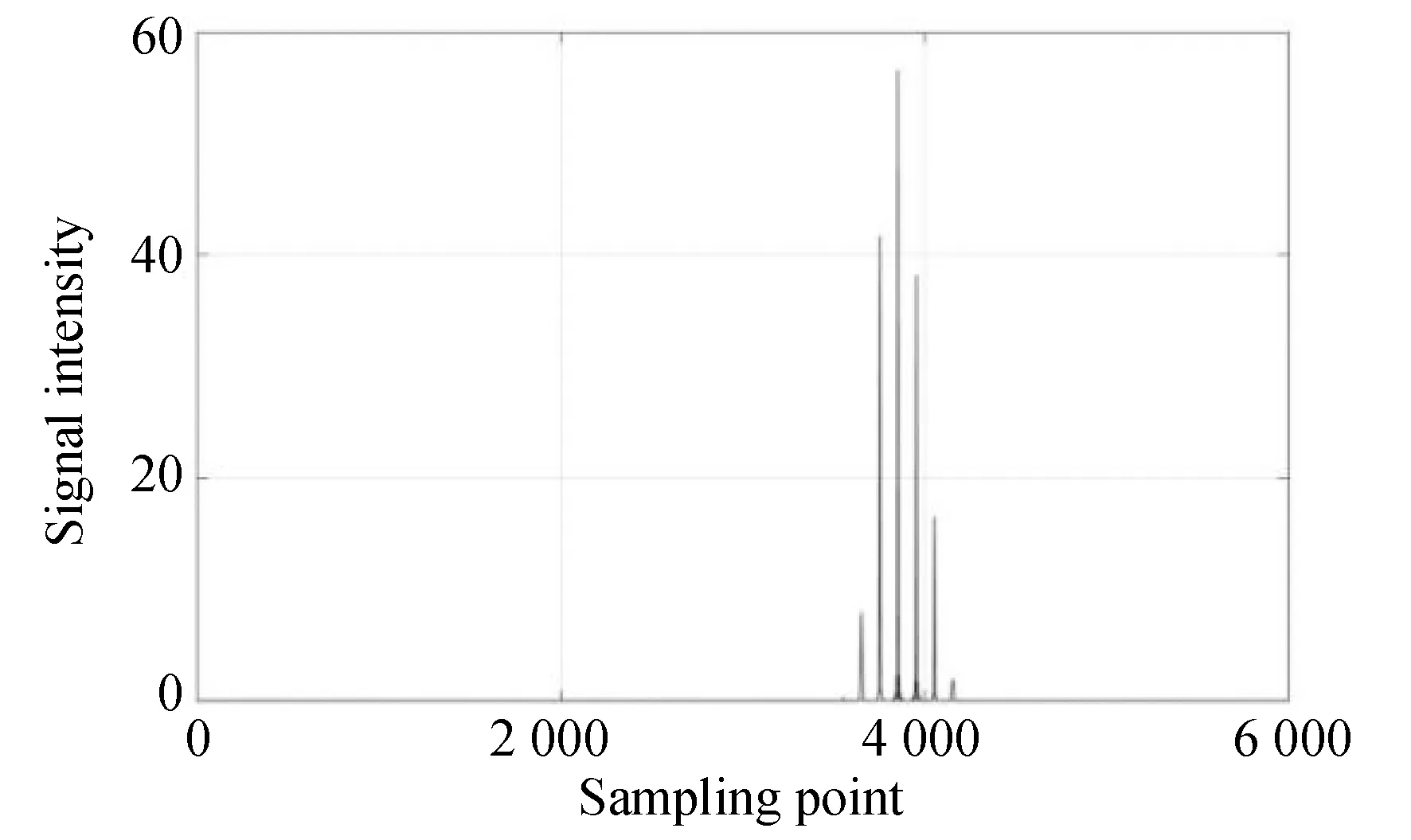
图4 回波信号强度Fig.4 Intensity of echo signal
将图4中的信号强度坐标转换为对数坐标,回波信号的变化趋势更加明显,图5为对数坐标下的回波信号强度。前36个距离门的回波信号强度随着探测距离的增加逐渐衰减,从第36个距离门开始,信号强度陡增2~3个数量级,选取信号强度最大的距离门作为风力发电机位置。试验中受风力发电机影响的距离门总数通常为6~9个,风机前后几个距离门信号强度的增大与激光的拖尾现象有关[25]。

图5 对数坐标下的回波信号强度Fig.5 Intensity of echo signal in logarithmic coordinates
3.4 离散频谱校正
经过快速傅里叶变换(Fast Fourier Transformation,FFT)产生的频域信号由于栅栏效应会产生较大误差,无法满足探测精度要求,故需要进行谱峰位值的校正。图6为风机所在距离门的频谱数据,其顶部出现折线,而真实回波信号应当为光滑的曲线,表明频谱数据出现的偏差需进一步校正。

图6 风机所在距离门的频谱数据Fig.6 Spectrum data of distance gate where located wind turbine
目前,常见的离散频谱校正方法有最大似然估计法[26]、插值法[27]、比值法[28]、能量重心法[29]、FFT+DFT傅里叶变换法[30]和三角形法[31]等。本文在综合考量这些算法的优缺点后,采用三角形法。这种方法具有稳健、运算量小、抗噪声能力强的特性,适合激光雷达的数据处理[32-33]。图7为三角形法原理图。实线1,2,3为回波信号的谱线,假设虚线4为真实回波信号谱峰所在谱线,将谱线3以虚线4为对称轴进行平移获得顶点为B的虚线,在三角形ACD中利用等比原理求得BE的长度,假设BE长度为1-d,则校正量即为d。
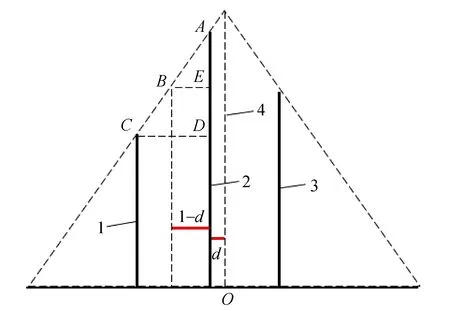
图7 三角形法原理Fig.7 Principle diagram of triangle method
3.5 振动信息提取
校正后的谱峰频率与出射光的频率相减,即可得到目标物体在激光光束方向的径向振动速度。径向振动速度v的计算公式为:
(2)
式中:X为校正后的谱峰频率,Xmax为出射激光的频率,fN表示激光雷达的采样频率,N表示进行FFT变换的点数,λ为出射激光的波长。径向振动速度v以远离激光雷达的方向作为正值,朝向激光雷达的方向为负值。以振动速度的数值从正到负,再从负到正的一个变化过程作为一个振动周期,记作周期T。根据振动周期可以求得振动频率f=1/T。
4 试验与结果分析
4.1 风力发电机实测试验
为了评估多普勒激光雷达探测风力发电机振动的能力,试验选取真实的风力发电机作为探测目标,风力发电机的高度约为80 m,风轮直径约为151 m。
试验采用了一种依靠多普勒激光雷达和手持激光测距仪的遥测方法,具体步骤如下:
(1)首先进行安装位置的选址。安装位置应位于平整的地面,确保风力发电机位于激光雷达的有效探测距离以内,同时需要综合考虑激光雷达的伺服扫描精度、风力发电机高度等因素,安装位置过远会导致激光光束无法照射在风力发电机上,安装位置过近则会导致振动速度的径向分量过小;
(2)调节激光雷达机体的方向,使激光雷达基准方向的朝向为正北方向,调节激光雷达支撑脚的高度,确保激光雷达的机箱处于水平状态。使用手持式激光测距仪对照射点位置进行测距;
(3)以激光雷达为基准,适当估算风力发电机的方位角范围和俯仰角范围;
(4)激光雷达根据估算的俯仰角范围,依次对每一个俯仰角角度进行横向扇面扫描,每一个扇面的俯仰角固定不变,根据雷达回波信号的信噪比判断风力发电机对应的方位角范围;
(5)激光雷达进行纵向切面扫描。激光雷达在准确的方位角范围内,依次对每一个方位角角度进行纵向切面扫描,每一个切面的方位角固定不变,俯仰角在估算的俯仰角范围内。根据雷达回波信号的信噪比判断风力发电机高度对应的俯仰角范围;
(6)在确定风力发电机对应的准确方位角与俯仰角后,选取照射点进行一次定向照射,根据回波信号的信噪比计算激光雷达与照射点的距离,并与手持式激光测距仪的测距结果进行比对。随后,激光雷达以Point to Point模式(定点模式)对照射点进行定向扫描,记录扫描数据,采用测振频谱数据处理方法进行后期处理。
图8为遥测流程。激光雷达依靠信噪比计算照射点距离的原理为:当激光雷达照射在硬靶目标上时,回波信号的信噪比会远大于照射在大气分子或气溶胶上,硬靶目标指的是类似于风力发电机的固体目标。
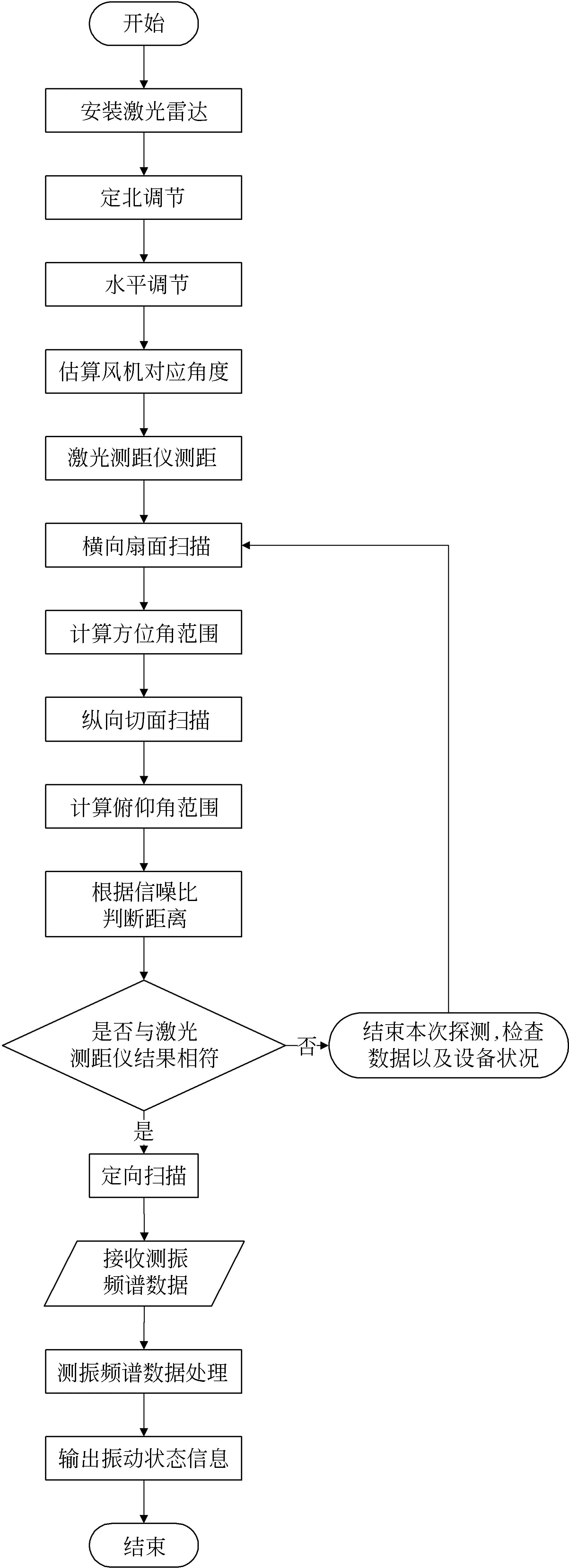
图8 遥测流程Fig.8 Flow chart of telemetry method
试验共进行7次测量,结果如表2所示,其中径向振动速度均值为取绝对值后的均值。试验中使用的多普勒激光雷达具有探测大气风场的能力,在探测风力发电机振动的同时,也会记录下激光光束方向的风速信息。选取距离风力发电机上风向150 m处的风速作为风机入流或环境风速参考。

表2 试验结果汇总
试验测得风机振动速度在0.1~3 m/s以内,除试验6中的振动频率出现较大的浮动,其余6次试验的振动频率大致稳定在0.25~0.5 Hz以内,这与参考文献中传感器测量数据相符[34-35]。当风速增大时,风力发电机的振动速度会相应的增加,平均风速与平均振动速度存在一定的对应关系。图9为部分试验的径向振动速度。图9(a)中,风力发电机径向振动速度相对稳定,数值多在0.04 m/s以下。图9(b)中,风力发电机的径向振动速度的变化幅度较大,这与风力发电机在瞬间强风影响下产生的瞬态响应有关。这种瞬态响应的表现形式为初期振动速度迅速增大,在阻尼的消耗作用下,振动逐渐衰减,最终达到阻尼与外界风载荷平衡的状态[36]。
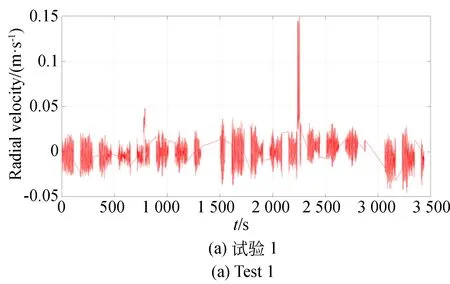
图9 径向振动速度Fig.9 Radial vibration velocity on laser line of sight
图10为风力发电机的径向振动频率,该时段的风机振动频率较为稳定,在0.5 Hz上下浮动。
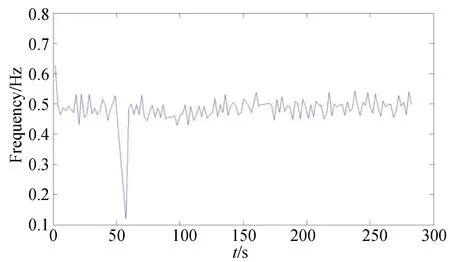
图10 径向振动频率Fig.10 Radial vibration frequency
风力发电机塔筒顶部的振动则类似于复摆的过程[37]。这种复摆指的是塔筒绕底座做微小摆动的动力运动体系,其运动路线并非直线,而是一种不规则的图形[38-39]。在持续风载荷的影响下,风力发电机路线复杂且多变。
风力发电机实测试验获取了风力发电机在激光光束方向的径向振动信息。在激光光束照射点所在的水平面内,风机塔筒可能会进行沿着激光光束径向运动和垂直激光光束的切向运动。由于只采用了一台激光雷达,暂时无法获得风机塔筒的二维振动信息。获取二维振动信息至少需要两台激光雷达进行联合观测。
4.2 固定目标实测试验
激光雷达探测结果的误差主要来自噪声和算法误差。此外,还包括固定目标极轻微的自振等因素。
噪声主要包括本振散粒噪声、探测器噪声和相对强度噪声,以及实际探测中产生的本底噪声。采用AOM移频的方法可有效地避开相对强度噪声的影响,本底噪声可通过数据处理进行抑制,因此影响探测结果的主要噪声为本振散粒噪声与探测器噪声。根据激光雷达实际参数进行的MATLAB仿真分析表明:本振散粒噪声的强度约为-132.51 dB,探测器噪声的强度约为-216.72 dB[22]。
算法误差的主要来源是离散频谱校正算法,本文使用三角形法进行离散频谱校正。三角形法具有一定的校正精度,在校正过程中会出现误差,该误差也是导致最终探测结果出现误差的主要原因之一。
在进行风力发电机实测试验后,并不能确定误差对探测结果的影响程度,因此进行固定目标试验。由于风力发电机容易受到风载荷的持续影响,不能作为固定目标,因此选取楼体建筑物作为固定目标。根据文献资料,高度小于30 m且高宽比小于1.5的低矮建筑物,可不考虑风振[40-41]。试验选取的建筑物离地高度为21 m,高宽比小于1,可忽略风振对探测结果的影响。
在距离目标约600 m处,使用激光雷达对建筑物顶部进行定向扫描并记录扫描数据,采用与风力发电机实测试验相同的数据方式进行后期处理。
图11为目标建筑物探测结果,径向振动速度误差约为-0.062~0.059 m/s,误差取绝对值后的均值为0.013 m/s,误差标准差为0.018 m/s,绝大部分的数值在0.03 m/s以下,这与MATLAB的仿真结果基本相符。
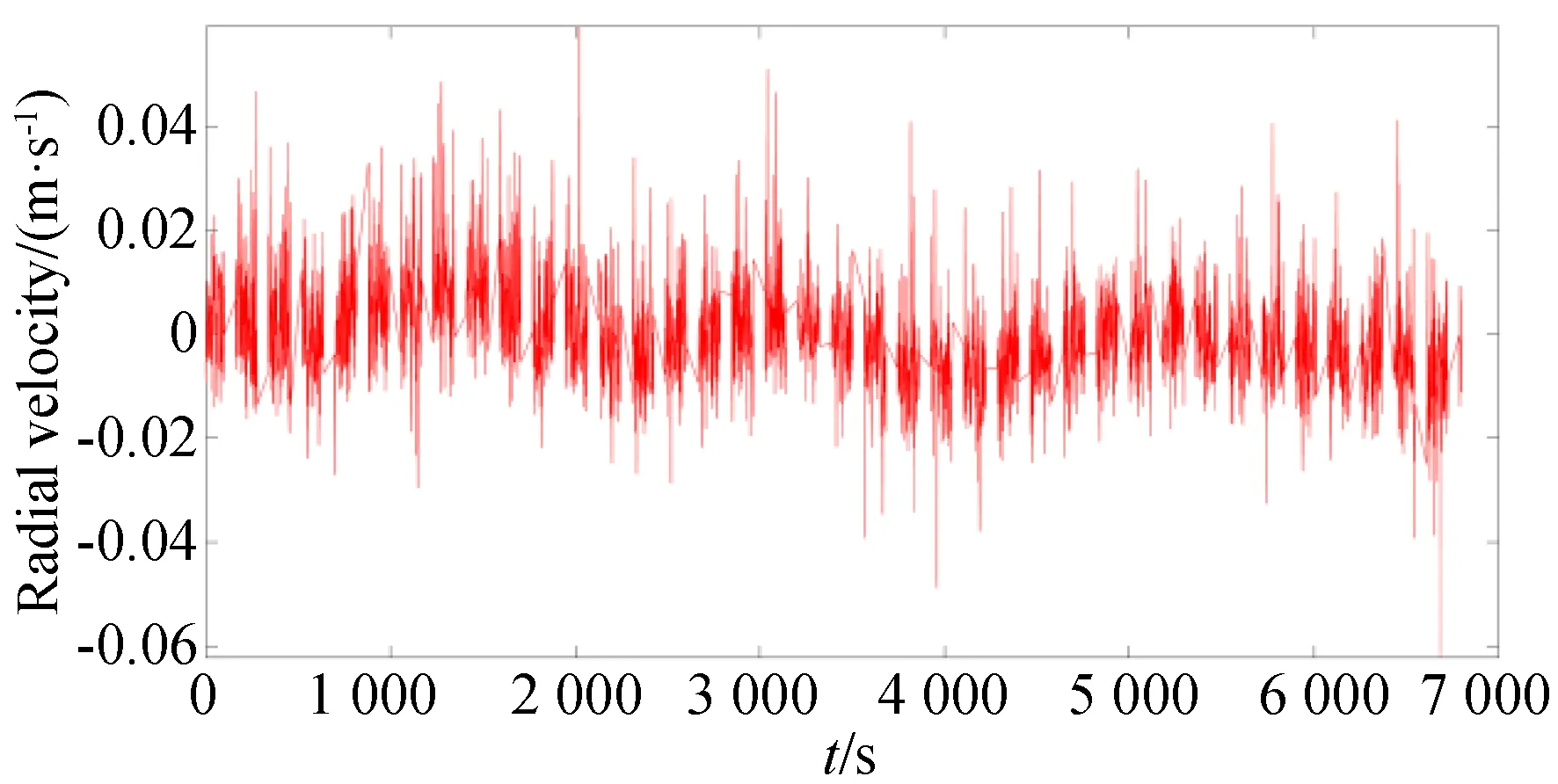
图11 目标建筑物探测结果Fig.11 Results for target building detection
在忽略风振影响的前提下,可将固定目标实测试验的结果作为实际探测中误差水平的参考依据。MATLAB仿真结果如图12所示,时长100 s。如图12(a)所示,无噪声情况下,算法导致的径向振动速度误差约为-0.037~0.039 m/s,误差值取绝对值后的均值为0.010 m/s,误差标准差为0.013 m/s。如图12(b)所示,在根据激光雷达实际参数添加噪声后,径向振动速度误差约为-0.049~0.047 m/s,误差值取绝对值后的均值为0.011 m/s,误差标准差为0.014 m/s。
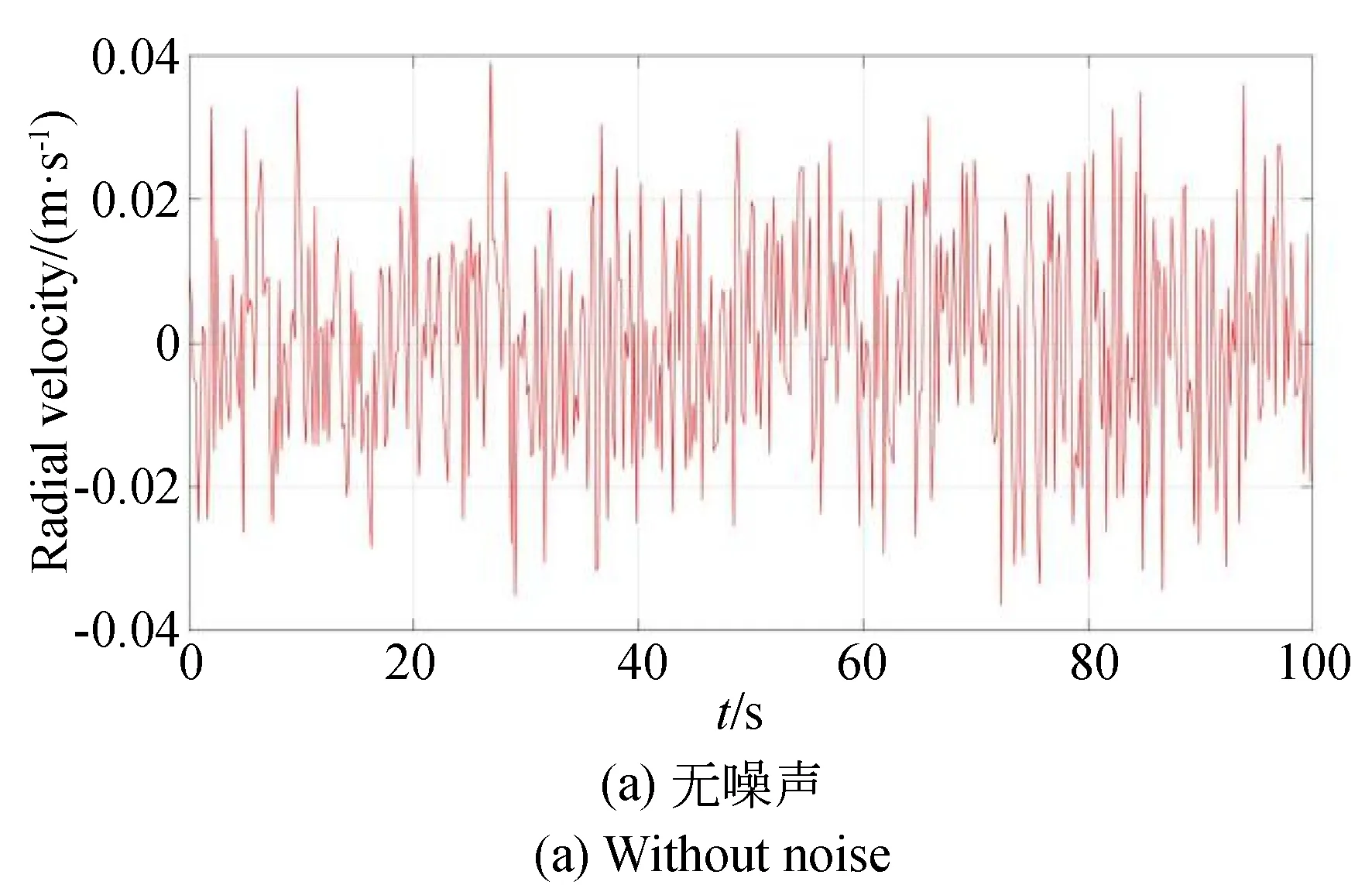
图12 MATLAB仿真结果Fig.12 MATLAB simulation results
MATLAB仿真结果表明:在忽略风振和固定目标轻微自振等因素的前提下,算法误差是造成探测结果出现偏差的最主要因素,约占69%~83%,噪声约占17%~31%。
固定目标探测试验和MATLAB仿真的结果表明:误差造成振动速度大部分在0.03 m/s以下,风力为2~3级时,风机的振动速度在0.2 m/s以上,误差只会对探测结果造成轻微的影响;风力大于3级时,可以忽略误差造成的影响。
5 结 论
本文提出了一种利用多普勒激光雷达探测风力发电机振动的方法,并提供了一种基于频谱校正技术的测振数据处理方法,对风力发电机以及固定目标进行试验。试验结果表明:多普勒激光雷达对频率为0~2.5 Hz、速度为0.1~3 m/s的风力发电机低频振动探测效果明显,具备一定的探测风力发电机低频振动的能力;多普勒激光雷达探测振动速度的误差约为0.03 m/s,风机的振动速度远大于误差值,结果具有较高的准确性。根据风电行业对数据保密性的要求,风机的真实振动状态参数暂时无法获取。因此,需要进行激光雷达与振动传感器的同步观测试验,进一步验证数据分析结果的合理性。
随着风力发电机振动遥测技术的发展和完善,激光雷达会在风电领域发挥出更大的应用价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22
防爆电机(2022年1期)2022-02-16
汽车观察(2021年8期)2021-09-01
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
数学年刊A辑(中文版)(2019年3期)2019-10-08
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
山东工业技术(2016年15期)2016-12-01
