高冗余度仿生机器人的运动学研究
2020-11-23 09:17赵淑萍刘桐青
湖北农机化 2020年18期
赵淑萍 刘桐青
(山东协和学院,山东 济南 250107)
1 设计优势
(1)模块化设计,可以根据任务灵活组装模块。
(2)采用设计的新型关节和仿蛇鳞摩擦外壳地形适应性强,运动灵活,单关节自由度高。
(3)通过特定的救援给养输送装置可以为受困人员提供生命给养,维持生命体征,延长救援时效。
(4)通过运动控制算法,深入废墟内部,进入狭小空间的搜救;利用复合视觉系统进行微光、超视距搜索,保护受困人员实例。
(5)质量轻便,单个模块仅重650g。
2 研究的过程及实施
2.1 机械设计部分
救援装置要求行动灵活,关节自由度高,对关节部分提出设计灵活的要求。
(1)连接结构设计。
对已有技术分析,万向节结构具有运动灵活;正交结构具有承载能力强的特点。假设取其二者优点结合,设计出一款利用正交结构逼近万向节的连接方式。
利用SolidWorks进行建模分析,建模图见图1,设计原理是将相连正交结构两轴逼近为0,理论设计中该结构可以与万向节功能相同,但转配分析其三维具有一定角度限制,为一个锥面空间,见图2。


通过运动仿真,理论设计和仿真结果一致。
(2)仿生摩擦外壳设计。

对蛇类生物研究中,其蛇鳞的摩擦系数成各向异性,向前的摩擦系数小于向后的摩擦系数,依照此结构设计出特殊的纹路,改变摩擦系数的各向异性。通过计算纹路与轴线夹角40~45°为最佳,设计见图3。
2.2 结构优化
(1)运送给养结构。
通过组织答辩和调查当地消防人员,总结调查结果提出设计给养运送机构。

围绕这个问题我们对救援装置的支架进行优化,在其中间预留出夹持固体食物和储存水的容器,结构置于机体内如图4。
空腔内可以放置小型水袋或压缩饼干等,在开口部分通过卡口装置打开,方便受困人员打开获取资源。单个部分可以最大运载250g的给养。
连接部分一体设计,安装活动端盖将给养用长条形塑封袋塑封条折叠放入,受困人员打开端盖抽出即可。
(2)其它内部支撑设计。
电子元件需要相应的安装方式,结合腔体设计出安装支架。
内部支撑受外界因素小,因此采用ABS工程塑料为设计材料,设计结构见图5。

2.3 模块化设计
进一步对设计方案优化,原有设计未考虑功能化设计,设计功能单一,对此进行接口的设计。
将连接部分进行拆装接口设计,见图6。将给养运送结构模块化设计,设计为可拆卸封闭式结构,见图7。
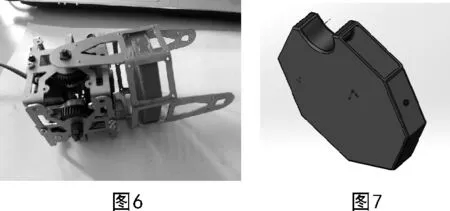
模块化设计后,可以根据任务需求进行相应的模块调整。
2.4 蠕动运动算法优化与调试
对算法设计实际仿真及调试,设定各标准参数值,发现关节与关节参数衔接有一定的卡顿,对算法和控制进行优化。
(1)蠕动运动算法设计。
救援装置的蠕动与蜿蜒是具有一定区别的,其在蠕动过程中是通过伸缩来完成向前的爬动,通过研究了解到蛇类生物向后摩擦力大于向前的摩擦力。因此,救援装置只能向前爬行。各个关节所采用PWM波为两路,即需要采用两个定时器才划分在相同时间段内的溢出中断执行。其参数的设置和蜿蜒运动相似,只不过将水平方向的主要参数赋值给竖直方向上的运动。
(2)蠕动算法优化与调试。
在进行算法仿真的过程中,对如何使救援装置的蠕动运动过程中某一节点突起使其保持平衡提出疑问。
在蠕动运动中,我们采用两个定时器分别计时,分别为定时器3与定时器5,触发中断产生其相对应关节的PWM波,来控制舵机旋转。在某一关节拱起时,将本关节的前后关节分别向其中心运动,当关节拱起时,我们会发现其拱起关节由于救援装置的单关节与整体关节相比,质量较轻,且其它关节整体与地面的摩擦较大,使其保持稳定,从这可以看出我们利用了部分关节逐节抬起,而不是多节关节抬起。
3 研究成果与价值
通过本次项目研究,设计出一种新型关节连接方式,采用这种连接方式可以有效降低直径和单关节长度比值,接近理想比值0.67;研究设计一种新型的仿生外壳设计,优于被动轮式外壳设计,可以更好地适应各类地形环境;可携带救援给养结构的设计,给出一种实际应用的方案;对运动算法的优化设计,设计出可以灵活运动的算法程序;依靠物联网的救援技术支持系统的设计,使救援技术不受地域限制。
在进一步改进后,可以根据不同的任务要求将相应的传感器模块换装,设计出适合管道检测、矿道毒气检测、军事等领域应用的产品。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
哈哈画报(2022年5期)2022-07-11
中外公路(2022年1期)2022-05-14
太原科技大学学报(2022年2期)2022-03-26
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
学生天地(2020年1期)2020-08-25
科学与财富(2020年34期)2020-03-11
消费者报道(2016年5期)2016-11-18
汽车实用技术(2015年8期)2015-12-26
数学大王·低年级(2015年6期)2015-07-09