基于无人机使用的航空发动机自动加速性试飞方法试验*
2020-11-18 23:19姚尚宏
机械研究与应用 2020年5期
杨 雄,姚尚宏
(中国飞行试验研究院 发动机所,陕西 西安 710089)
0 引 言
近年来,随着无人机领域的蓬勃发展,无人机用发动机得到越来越多的关注[1-8],由于飞机无人化操作带来的飞机/发动机使用特点[9],无人机用航空发动机试飞技术面临严峻挑战,如何将传统有人机航空发动机试飞技术与无人机设计和使用特点相结合是技术工程师面临的首要难题。发动机加速性试飞作为航空发动机设计定型试飞的关键项目[10],其加速过程中的工作稳定性和加速性能直接影响到无人机是否能准时到达战场并完成指定任务[11],因而,无人机用发动机加速性试飞是众多必须解决的试飞技术难题之一。
国内在发动机加速性试飞方面发表的文章较少,且更多的是有人驾驶飞机发动机试飞[12-13],无人机用发动机的试验研究还处于起步阶段,更多的是对试验内容的探讨[14-15],在国外,全球鹰高空长航时无人侦察机作为世界范围内顶尖技术水平的无人机,其动力装置采用了罗罗公司的AE3007H发动机,该型发动机是商用AE3007发动机的改进型,在采办初期进行了大量的试验,其中进行了至少3次高空台模拟试验[16]。在1995年和1998年进行的高空台模拟试验中,对发动机功率瞬变性能进行了专项的摸底试验,考虑了不同高度、不同推油门速率、有无引气、有无功率提取和进气畸变等因素对发动机工作的影响,试验过程中,优化了油门移动速率避免加减速过程中对发动机工作稳定性造成影响,多场次、考虑多种影响因素的发动机高空台试验显示发动机功率瞬变性能的重要性。
笔者基于无人机设计和使用特点,以发动机自动加速试飞为目标,对发动机自动加速性试飞方法进行研究。
1 无人机设计特点简介
1.1 无人机控制系统设计特点
对于大型无人机而言,飞机通常使用发动机最大状态或最大连续状态进行爬升,用部分推力进行巡航,用慢车状态进行下降。在巡航飞行阶段,常规的控制方法有速度闭环控制方法和总能量控制方法,前者通过控制发动机油门改变发动机推力来稳定飞机飞行高度和速度,后者固定发动机推力,通过高度和速度来控制飞机姿态。例如全球鹰无人机block20在45 000英尺以下采用速度闭环控制方法,当飞行高度超过45 000英尺以后采用能量控制方法控制飞行。
无人机的爬升和下降两种控制方法为发动机加速性试飞提供了一种途径,即可通过改变飞行高度来控制发动机工作状态的变化,达到预期的目标。
1.2 无人机用发动机加速控制特点
无人机发动机加速性受油门速率限制,需由油门指令速率、软件控制速率和电动舵机移动速率共同确定。油门指令速率反映了飞控系统或飞行操作员对发动机推力的需求,但需求指令到控制系统后,会受到系统软件设置的速率限制,如全球鹰无人机发动机在进行高空台试验时通过设置油门速率来确保发动机在功率变换过程中工作稳定。当控制器输出油门移动速率后,由电动舵机完成发动机油门的变化,舵机作为执行机构,有移动速率极限。三者对燃油控制是一个低选的工作模式,速率最低的环节起作用。
由此可见,有别于有人机直接将人工油门速率反映到发动机燃油调节器上,无人机需经过指令、控制系统和执行机构三个环节才能最终反映到发动机本体的燃油调节上。
1.3 无人机用发动机加速性含义
发动机加速的本质是发动机推力的变化,由于飞行过程中发动机推力无法直接精准的测量,因此采用发动机转速间接反映发动机加速能力。由于无人机用发动机控制特点,发动机油门指令需经过三个环节才能到达发动机燃调,与有人机发动机控制有显著的不同,因此,无人机发动机加速性试飞根据定义不同会有所差异,如考核发动机本体加速性,可通过发动机转速来判断。
1.4 无人机航路规划
无人机自主飞行需提前进行航路规划。航路规划设置航路点属性,飞控系统通过解读航路点属性对飞机进行控制,航路点属性主要包括经度、纬度、高度、速度和过点方式等等。
基于无人机爬升、巡航以及下滑等阶段不同的控制策略,通过对航路点的定义,可以控制飞机按照预期的轨迹飞行。
发动机自动加速试飞拟采取改变飞机高度达到控制发动机状态的目的。
2 发动机自动加速试飞方法设计
2.1 试飞需求分析
根据发动机加速性指标定义,发动机加速性试飞应满足以下几点要求:①发动机加速前油门处于慢车位置,发动机在慢车状态稳定;②加速时发动机处于大状态,转速满足相关要求;③飞行高度、飞行速度偏差在规定范围内;④飞机能自动进行加速性操作。
2.2 发动机典型加速性试飞过程分析
(1) 有人机发动机加速性试飞过程分析
有人机发动机加速性试飞中,主要以飞行员操作为主,飞行员根据对发动机状态的判断,进行相关油门的操作,完成发动机加速性试飞,典型过程见图1。

图1 有人机发动机加速过程分解
试飞过程中,对时机的把握完全依靠飞行员的主观感受,动作完成的质量取决于飞行员的反应。
(2) 无人机发动机加速试飞过程分析
无人机发动机自动加速试飞以航路点设计为基础,根据试飞需求,分解发动机加速性试飞动作,见图2,分析表明,完成发动机加速性试飞至少需要确定3个航路点。

图2 无人机发动机加速性试飞过程分解
2.3 发动机加速性试飞核心要素分析
通过试飞过程分解,分析得到无人机发动机自动加速性试飞的核心要素。
(1) 核心要素一:时间
无人机以航路点控制飞行,为达到发动机在预先设定的航路上自动进行加速性试飞,需对通过两个航路点的时间进行精确控制,包括动作点起始时刻和过点时刻控制。
动作点起始时刻是动作设计的根本,无论是试飞前期的数据处理,还是加速性试飞的动作设计,都以起始时刻为基准,在起始时刻的基础上,进行飞行时间的控制和高度速度等的控制。
过点时刻控制是根据无人机飞行控制精确度高的特点确定的,以无人机过航路点飞行时间为控制参数,能精确控制无人机的飞行高度、速度和发动机状态等参数,达到试飞的目的。
(2) 核心要素二:高度
根据国军标的要求,发动机加速性试飞需在一定的高度上进行,由于有人机试飞依据人的反应控制飞行姿态,飞行高度允许有一定的偏差。基于此规定,在进行无人机发动机加速性试飞时,可以利用无人机飞机高度控制精度高的特点,根据无人机飞机控制特点,设计出发动机加速性试飞方法。
国军标243A-2004《航空燃气涡轮动力装置飞行试验要求》在“发动机工作特性鉴定试验”,飞行试验中规定,“稳定平飞是发动机工作参数的测定及工作稳定性鉴定。试验时,飞行高度和飞行速度应保持基本不变,飞行高度的最大偏差不应超过±100 m,飞行速度的最大偏差不应超过±10 km/h。” 因此,选取无人机发动机加速试飞的高度偏差为±100 m。
高度控制主要包括下降高度和飞机改平提前动作高度。
飞机下降高度是由飞机的响应特性决定的。当无人机过航路点后,若下一航路点高度比当前航路点低,飞机通过俯仰角和发动机推力的变化,控制飞机飞向下一航路点,从当前航路点到下一航路点需要一定的响应时间。
飞机改平提前动作高度是指飞机在下降高度飞往下一航路点过程中,为避免飞机高度振荡,飞机不会飞到航路点设置的高度后再改平,而是提前一定高度开始改平,飞机的俯仰角和发动机推力在这个过程中会提前进行调节,飞机在响应改平过程中还会下降高度,直至目标高度。在加速性试飞过程中,需要考虑飞机提前改平高度,否则会影响发动机状态。
(3) 核心要素三:发动机状态
发动机状态控制是整个试验的最终目标,自动加速性试飞涉及到发动机状态从初始状态收至慢车状态,在慢车状态保持,然后推油门至最大状态,整个过程中收油门时间,慢车状态油门保持时间以及转速响应时间等,都需要提前通过飞行试验数据确定。
(4) 核心要素四:飞行速度
飞行速度主要是满足发动机加速性试飞中的状态条件,不超出国军标要求的速度偏差范围。
国军标243A-2004《航空燃气涡轮动力装置飞行试验要求》在发动机加速性和减速性鉴定试验飞行试验中规定“在确定加速性时,飞行速度应保持基本不变,其最大偏差不应超过±20 km/h”。因此,选取无人机发动机加速试飞的速度偏差为±20 km/h。
发动机自主加速性试飞核心要素见图3。

图3 发动机自动加速性试飞核心要素分析
2.4 试飞实施方案流程设计
根据以上四点核心要素,设计出发动机加速性试飞方案的具体流程为:
(1) 确定航路点过点时刻,作为航线设计的起始时刻。
(2) 确定飞机开始下降的响应情况,根据高度精度和速度精度要求确定航线规划的最长时间。
(3) 根据油门位置和转速稳定情况确定最短时间。
(4) 根据最短时间和最长时间,设定一个Δt,Δt在最短时间和最长时间之间。
(5) 根据Δt和飞行速度确定两个航路点之间的距离。
(6) 根据Δt确定飞机下降的高度,然后根据飞机改平超调量确定航路点最终的下降高度。
(7) 根据发动机加速时间指标确定下一航路点的高度和距离。
通过以上7个步骤,可以完成发动机加速性试飞中3个航路点属性(经度、纬度、高度、速度)的设计,见图4。

图4 发动机自动加速试飞关键航路点设计
3 试飞验证
采用上述步骤设计某型国产发动机在无人机上的加速性试飞,试飞结果见图5和表1所列。

图5 发动机自动加速试飞参数曲线
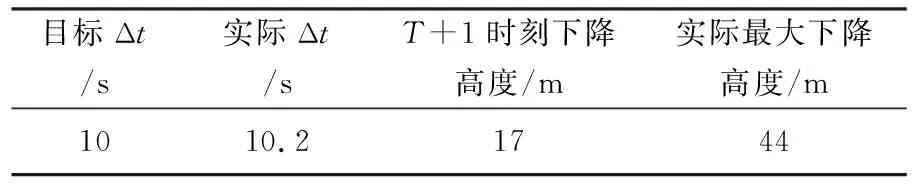
表1 发动机自动加速性试飞参数对比
结果表明,飞机飞行时间与设计值相差无几,发动机状态达到了预期目标,发动机自动完成了从慢车加速到最大的工作过程。
4 结 语
基于无人机设计和使用特点,通过对比有人机和无人机发动机加速性试验差异,对试验过程进行分析,总结出无人机发动机自动加速性试飞的核心要素,确定出发动机自动加速性试飞方案的具体实施流程,并通过试飞验证。试验结果表明该无人机发动机自动加速性试飞方法合理可行,具有较高的操作性。由于分析是建立在无人机常规设计基础上,因此该方法具有一定的通用性,能指导后续发动机加速性试飞。
猜你喜欢
岷峨诗稿(2020年4期)2020-11-18
中学生数理化·高一版(2020年6期)2020-07-25
火力与指挥控制(2020年2期)2020-04-02
汽车电器(2018年8期)2018-08-25
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
汽车之友(2016年10期)2016-05-16
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01
食品工业科技(2014年23期)2014-03-11