基于无人机侦察与模型仿真的人机协同毁伤评估
2020-11-18 04:46牛轶峰王治超王菖刘芳
指挥与控制学报 2020年3期
牛轶峰 王治超 王菖 刘芳
目标毁伤效果评估是综合考虑战役目的、战场环境、毁伤力量等因素,对火力打击效果进行综合分析评定的过程,是实施火力协调、调整火力打击重点的主要依据和确保战役火力毁伤任务圆满完成的重要环节[1],在Boyd 提出的观察、判断、决策、行动(Observe,Orient,Decide,Act,OODA)作战回路中,毁伤评估是观察的一个重要环节,是对于武器毁伤效能的重要评估方法,毁伤评估阶段的观察结果为判断提供信息基础,判断结果将会直接影响到决策的准确性,进而决定行动的有效性.
毁伤评估研究涉及军事学、自主控制、图像处理、数值计算等方面,是一个多学科的综合应用领域,目前,毁伤评估的技术手段主要包括:基于航空航天侦察图像的变化检测与提取方法、基于武器战斗部威力与目标易损性的分析仿真和专家判读,基于图像变化检测的方法因简便易行、战场实效性较高等原因被广泛运用于实战,目前基于无人机图像的自动变化检测方法已有相关研究成果[2−5],但建立一种通用的变化检测方法是困难的,其原因在于:战场环境具有复杂性、对抗性、动态性等特点,无人机获取的图像可能受光照、晃动、角度等因素的影响,导致图像质量下降,从而影响变化检测算法的效果.基于武器战斗部威力与目标易损性的分析仿真方法能够全面地描述毁伤过程,系统性较强,有大量学者对模型仿真进行了研究[6−9],但该方法要求事先对目标和战斗部进行建模,是一种离线的评估方法,且对于建模精度要求较高,实时性较差,专家判读方法有利于发挥人对于图像场景的理解优势,能够充分利用专家经验,但受专家水平、专家组构成的影响较大,且该方法主观性较强,容易产生经验误导.
本文通过融合自动化算法中图像变化检测的时效性和模型仿真评估的系统性,结合专家经验在毁伤评估中的监督作用,建立一种基于无人机侦察图像与模型仿真计算的人机协同毁伤评估方法,充分利用人的经验优势和机器的计算优势,达到高效准确的毁伤评估结果.
1 基于协同设计方法的毁伤评估
1.1 任务描述
目前已有大量学者对多无人机及人在回路的协同作战链路进行了研究[10−12],本文面向的任务背景为人在回路的协同作战闭合链路:无人机携带侦察传感器前往预定区域侦察,获取目标打击前的侦察数据;实施目标信息处理;指挥部根据目标信息,制定打击方案,生成期望武器投放位置、角度、战斗部炸高、攻角、速度等参数;无人机或有人机按计划对目标进行打击;无人机对被打击目标进行毁伤效果侦察,获取目标毁伤后的图像等信息,由毁伤评估人员与无人机地面站进行目标毁伤评估;依据作战要求与评估结果,有必要时实施新一轮的火力打击.如此构成图1所示的人在回路的协同侦察、打击、评估、补充打击的闭合链路.

图1 人在回路的协同作战环路示意图Fig.1 Human-in-the-loop cooperative operation paradigm
1.2 面向毁伤评估任务的人机相互依赖关系分析
协同设计(Coactive Design)理论由美国佛罗里达人机认知中心(IHMC)的Johnson 博士提出[13],该方法在传统任务分析的基础上,提高了针对团队成员间的协同能力互补性考量,协同设计的基本流程为:识别过程、选择和实现过程、变化评估过程.识别过程是协同设计的核心步骤,该步骤利用一种被称为相互依赖关系分析(Interdependence Analysis,IA)表的分析工具,进行团队成员间的相互依赖性分析.
针对本文的任务背景,进行面向毁伤评估任务的人机协同分析,建立了相互依赖性分析表,如表1所示,其包含5个基本步骤:
1)分析任务的能力需求,在IA表的左侧进行层次任务分析,将高级任务分解为适当粒度的子任务,在对应的子任务后面分析对应的能力需求,例如将基于图像变化检测的评估方法分解为场景匹配、目标选择、变化检测和提取、毁伤计算.
2)枚举可行的团队成员角色分配方案,将团队成员按照执行者和辅助成员的分类,组成角色分配方案.在本文的任务背景下,将人机协同毁伤评估系统分为两类成员:R表示计算机,H表示毁伤评估操作人员,按照自主等级从高到低,可以生成4种搭配方案:R(由机器独立完成)、RH(机器为主人辅助)、HR(人为主机器辅助)、H(由机器独立完成).
3)评估执行者和辅助者的能力,在角色分配方案对应的列下对各个成员作为执行者/辅助成员的能力进行分析.为了增加直观性,协同设计采用不同的颜色编码表示能力强弱,从低到高分别为红色(0)、橙色(1)、黄色(2)、绿色(3).
4)识别潜在的相互依赖关系,执行者和辅助成员的能力分析结束,通过其颜色组合来分析潜在相互依赖关系,例如场景匹配子任务中,分配方案RH中计算机能够独立进行图像配准,人可以辅助其加强可靠性,当执行者的能力不足以独立完成子任务时,该相互依赖关系需要格外关注.
5)确定OPD需求,在IA表的最右侧是团队成员之间的可观察性、可预测性、可干预性(Observable,Predictable,Directable,OPD)需求,其根据团队成员之间潜在的相互依赖关系,决定团队成员间谁需要观察谁的状态、谁的动作/状态可以被谁预测、谁需要以什么方式干预谁.在应用中,OPD需求通常决定了成员之间将以一种怎样的形式进行交互.
1.3 人机协同毁伤评估流程设计
构建基于无人机侦察与模型仿真的人机协同毁伤评估流程如图2所示.
结合IA表分析结果,具体步骤为:
1)无人机侦察获取目标数据并预处理,包含目标类型、位置、朝向、打击前图像等信息.
2)系统和操作员对判断数据质量以选择合适的评估方法,包括图像清晰度、辨识度,弹目交会参数完整性、正确性等,此步骤使用IA表中的HR方案.
表1 人机协同毁伤评估相互依赖性分析表Table1 Interdependence analysis table of human-machine collaborative damage assessment
3)操作员根据数据质量和自身状态选择自主等级,数据质量越良好、自身工作负荷越高,则越倾向于选择高自主等级.
4)根据自主等级划分表进行对应子模块的毁伤评估,自主等级划分表如表2所示,包含3个毁伤评估子模块:基于图像变化检测的毁伤评估、基于模型仿真计算的毁伤评估、专家判读.根据IA表的不同方案进行分析组合,其中基于图像变化检测的毁伤评估以RH方案为基础,包含两种模式:手动目标分割、自动目标分割;基于模型仿真计算的毁伤评估以RH方案为基础包含两种模式:手动参数设置、自动参数调用;专家判读只包含以HR方案为基础的操作员判读一种模式.
5)系统进行毁伤评估结果融合,系统根据预设的权值对子模块评估结果进行融合,物理毁伤比例融合原理如式(1)所示.

其中,Af为最终毁伤评估结果.Ai为基于图像变化检测的毁伤评估结果,Am为基于模型仿真计算的毁伤评估结果,Ae为专家判读的毁伤评估结果,k为子模块对应归一化的权值,各权值选取根据不同的操作员能力、不同操作状态、不同自主等级等因素有所差异.目前本文根据实验中操作员水平,结合经验使用预设权值,并通过实验不断迭代权值参数,功能毁伤评估由物理毁伤评估结果推断,与子模块功能毁伤评估投票结果对比,结果相同则采纳,结果不同则操作员介入判断.

表2 人机协同毁伤评估自主等级划分表Table2 Tableof autonomy level of human-machine cooperative damage assessment

图2 基于IA表的人机协同毁伤评估流程设计Fig.2 Design of human-machine collaborative damage assessment process based on IA table
2 基于图像变化检测的毁伤评估
基于图像的变化检测基于一系列图像处理技术实现,主要步骤为:图像配准、目标分割、图像变化检测、毁伤识别提取、毁伤计算.图像变化检测模块主要针对图像质量良好,目标清晰无遮挡情况时使用,当目标因复杂背景或遮挡导致自动算法难以评估时,可以降低该模块权值或使用模型仿真和专家判读模块,根据IA表的分析结果,基于图像变化检测的毁伤评估方法以RH方案为基础进行拓展.在图像配准子任务中,以RH方案自动配准为主,HR方案的人工配准校正为辅,在目标分割子任务中,分为两种模式:RH方案自动目标分割、HR方案手动目标分割.
2.1 目标毁伤图像配准
目标毁伤图像配准主要解决如何将打击前后的图像表示在同一坐标系下,图像特征点指图像颜色特征或纹理特征明显的点[14],通常带有较为丰富的图像信息,能够压缩图像信息,提高配准速度,本文使用SURF算法,是一种基于图像特征点的配准方法,其针对尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)算法的改进,提高了算法效率和鲁棒性[15],此外,本文通过优化SURF算法中的Hessian阈值、特征点数量等进一步提高了算法效率和准确率.
SURF算法的基本流程为:使用不同尺度的盒式滤波模板对图像f(x,y)进行滤波得到不同尺度的新图像D(x,y),构建尺度金字塔;在不同尺度下计算Hessian矩阵,如式(2),求Hessian矩阵判别式的极值得到该尺度下的特征点;通过统计Haar 小波特征得到特征点的主方向并生成对应特征点描述子;在描述子空间下,计算两图像特征点之间的欧式距离,获得特征点之间的匹配关系;基于匹配关系求空间变换矩阵将两幅图表示在同一坐标系下.

如图3为图像配准结果,左侧为打击前图像,右侧为配准的打击后图像.若算法检测的配准结果出错,可由操作员进行特征点校准,通过人工选择图像特征点,提高配准的正确性.

图3 图像配准结果Fig.3 Image registration results
2.2 毁伤目标分割
为得到精确的毁伤计算结果,变化检测需要基于目标分割进行,即将目标从背景中分离,获取目标的轮廓区域信息,图像分割常用的算法有基于阈值的分割方法、基于边缘的分割方法、基于区域的分割方法和基于图论的分割方法等,本文的自动目标分割使用基于图论算法中的GrabCut算法进行目标分割.
GrabCut是一种基于GraphCut的改进算法,由微软研究院提出,并广泛用在多种图像处理算法库中[16],GrabCut是一种交互式图像分割算法,其特点在于只需要对目标进行大致的框选,就可以达到良好的分割效果,由操作员框选出目标所在区域的大致矩形范围,在该矩形以外的区域全部被视为背景,矩形内的部分视为可能的前景或背景.
GrabCut 使用最大流/最小割(Max Flow/Min Cut)理论.算法将图像映射为图论中的无向图(Undirected Graph),其包含节点和边,节点包含两类,一类表示图像中的每个像素;另一类是终端节点,其中一个S节点表示前景,一个T节点表示背景,边也有两类,一类表示相邻像素之间的连接关系;另一类是像素到终端之间的连接关系.
图的能量函数如式(3)所示.

其中,R(L)为区域项,表示节点到终端的边的权值.其分为两部分,一部分是和S节点相连的边的权值Rp(1),另一部分是和T节点相连的边的权值Rp(0).当一个节点越有可能属于前景时,其Rp(1)越小,Rp(0)越大.B(L)为边界项,表示节点之间边的权值,当边两端节点差异值越大,B(L)越小,越有可能是割边.a为比例因子,表示区域项和边界项的相对权重.GrabCut 方法的优化目标为优化能量函数使其达到最小,即最小割.
基于GrabCut算法实现的毁伤目标分割结果如图4所示.

图4 目标分割结果Fig.4 Target segmentation results
手动目标分割采用套索模式,由操作员手动绘制套索形成目标模板,再通过模板对图像进行目标分割,此模式相对于自动目标分割精确度较高,但耗时较长.
2.3 目标毁伤差异图像构造
基于图像的毁伤评估方法其核心在于变化检测,目的是构造表征有目标变化信息的差异图像,图像数值法通过对图像的像素灰度值做代数运算构造差异图像,在变化检测的研究范围内,通常使用差值法和比值法,相对于差值法,比值法对于噪声不敏感,且能够增强变化信息、抑制背景差异和减少大气影响,因此,在对于统计要求不高时,一般都通过比值法配合形态学处理进行变化检测.
比值法使用图像算术运算中的除法运算为基本处理方式,也称为比率变换.比值法将图像矩阵中对应元素相除.在实际运用中,通常对数值法原理式做出一定改进[17],例如:对偶两幅输入图像的关系,避免因不同图像做分母的问题导致的输出不同问题;将输出图像的灰度范围限制在0到1之间,便于后续毁伤提取;为了避免分母为0的数学错误,在比值的分子分母同时加1,改进后采用原理式如式(4)所示.

根据式(4)得到的C(x,y)灰度值域为[0,1],范围过小不利于后续阈值分割,通常需要进行灰度值平衡,可采用的方法有线性变换,如乘法拓展灰度值范围;非线性变换,如对数变换[18];统计方法,如直方图均衡化等.
基于图像数值法得到的目标毁伤差异图像如图5所示,从图中可见,除了毁伤部分,周边还存在噪声,需要对噪声、暗斑产生的非毁伤信息进行抑制.

图5 数值法构造差异图像结果Fig.5 Difference image based on numerical method
2.4 差异图像形态学处理和毁伤评估计算
为了更准确地提取毁伤变化信息,一般先采用形态学处理已构造的差异图像,其目的是为了消除噪声和图像暗斑缺陷,然后根据灰度阈值分割的方法提取出变化区域,为毁伤变化计算提供信息.
对图像的形态学处理一般是指数学形态学,是一门在拓扑学上发展起来的图像分析学科,在图像处理的理论体系中占有重要地位,本文利用基于图像二值膨胀腐蚀的闭运算操作,先进行膨胀运算、后进行腐蚀运算,达到的最终效果是消除低于其邻域的点,即消除暗点.
灰度阈值分割是一种基于全局光谱特征的图像分割方法,其主要分割的依据是图像或部分图像的灰度直方图,根据其对灰度直方图的分割方法的不同,常用方法包括:最大方差阈值法、双峰法、迭代法、最大类间方差法等.
本文使用的是最大类间方差法,由日本学者大津(OTUS)提出,也被成为大津法,其基本原理是求OTSU阈值,使得通过OTSU阈值分割的前景和背景间的类间方差最大.OTSU算法分割稳定,不易受图像对比度和亮度的影响,并且计算简单,处理速度快.其基本原理如式(5)所示.

其中,OTSU阈值TH 将灰度分为小于阈值的背景部分和大于阈值的前景部分,背景部分的概率为p1,平均灰度为g1;前景部分的概率为p2,平均灰度为g2;全局平均灰度为gG.因此,OTSU算法的优化目标为求TH,使得类间方差σ2最大.
在得到二值分割的差异影像后,通过统计计算得到毁伤区域占总区域的比例,并据此推断毁伤程度.
3 基于模型仿真计算的毁伤评估
基于模型仿真计算的毁伤评估方法包含战斗部毁伤效应建模,又称战斗部威力建模、目标几何与易损性建模,在此基础上通过弹目交会参数进行毁伤效应仿真,根据IA表的分析结果,基于模型仿真计算的毁伤评估方法以RH方案为基础,在参数调用子任务中,分为两种模式:RH方案自动调用参数、HR方案手动设置参数.
3.1 战斗部毁伤效应建模
战斗部是各类弹药的最终杀伤单元,其通常与弹药的制导方式、动力方式等无关,独立于其他单元成为毁伤评估的主要建模对象,战斗部按杀伤原理和打击对象不同,通常分为爆破战斗部、破片战斗部、侵彻战斗部.目前多数弹药通常使用串联战斗部,即使用多种战斗部进行耦合串联来加强弹药的多用途性和杀伤效能.但从毁伤效应而言,战斗部的毁伤效应仍包含冲击波效应、破片效应和侵彻效应.
1)冲击波效应.战斗部炸药在空气中爆炸,在极短的时间内转变为高温和高压的爆轰产物,并产生初始冲击波.随后,初始冲击波演化成一个尾部带有稀疏波区(或负压区)的空气冲击波,称为爆炸空气冲击波(或简称爆炸波),爆炸空气冲击波形成以后,脱离爆轰产物独立地在空气中传播,爆炸空气冲击波传播过程中波阵面压力在初始阶段衰减快,后期减慢,传播到一定距离后,冲击波衰减为声波.如图6为冲击波的定点波形,其中,Δpm、τ+和I+分别表示冲击波超压、正压持续时间和比冲量,构成了爆炸空气冲击波的3个基本参数.
2)破片效应,战斗部在爆炸时产生的高速飞散的破片命中目标,其直接效应是侵彻,如果是命中目标的燃料舱或者弹药舱,还会产生引燃或引爆的后效,破片的参数包括破片数量、质量及其分布、破片初速、破片空间飞散特性等,破片初速、破片空间飞散特性等参数通常可以由计算确定,其他参数一般通过试验确定,破片的飞行衰减如式(6)所示.
其中,D为炸药爆速,C/M为炸药金属比,α是衰减系数,S为飞行距离.
图6 冲击波定点波形Fig.6 Shock wave fied point waveform
3)侵彻效应.当高速弹丸碰撞靶板时,影响侵彻现象的因素很多,主要可以分为3 大类:靶、弹和弹靶交互状态,侵彻能力用对等效靶的击穿厚度和穿透一定厚度等效靶所需的侵彻速度来表征,前者称为侵彻极限厚度,后者称为侵彻极限速度.
3.2 目标几何与易损性建模
目标建模通常包含外观几何建模、物理易损性建模、功能易损性建模.
1)目标外观几何建模,本文主要研究毁伤目标为建筑及车辆,几何建模的关键是获得目标的外形参数及尺寸,可以通过工程图纸或三视图进行推断.建模工作可以借助CAD 软件进行目标的几何造型并划分网格,然后输出目标几何外形的数据.
2)目标物理易损性建模,在几何模型基础上,需要设置目标的物理易损性,即有关物理力学参数和毁伤标准等,主要包括部件材料的等效厚度、抗拉强度、有效破片的动能标准、面损伤密度标准、破片毁伤阈值和冲击波毁伤超压毁伤阈值等.
3)目标功能易损性建模,目标功能易损性建模主要通过毁伤树分析法(Damage Tree Analysis,DTA)进行,DTA 基于演绎分析进行,通过分解系统至子系统、组件、单元等,考虑单元的毁伤如何造成系统的毁伤,该方法着重点是考虑整个系统,它既考虑某个单元的毁伤,也考虑几个单元同时产生某种等级的毁伤时它们对系统的影响.
3.3 毁伤效应仿真
结合战斗部的毁伤效应模型和目标易损性模型,基于模型仿真计算的毁伤评估方法从3个方面进行毁伤效应仿真:冲击波毁伤仿真、破片毁伤仿真和侵彻毁伤仿真.
1)冲击波毁伤仿真,本文采用基于优化的爆炸冲击波加载算法,可以在不计算冲击波流场、不计算冲击波与目标的流固耦合的情况下,快速计算冲击波在目标部件表面的载荷,给出超压峰值、超压冲量等数据,该算法首先计算目标各面元与爆炸中心的相对关系,判断面元与爆炸中心之间是否通视,以及面元与冲击波方向夹角,然后对冲击波建立虚拟射击线以计算面元与爆炸中心的相对关系,利用冲击波的传播及衰减模型,获得冲击波在目标表面上的幅值、入射角度等数据,以此分析出目标表面上的反射超压、反射超压冲量,以报表或图形化的方式给出,结合目标易损性中的材料特性等,确定目标的冲击波毁伤情况.
2)破片毁伤仿真,破片主要打击轻装甲目标.根据武器/弹药的静爆破片威力参数,考虑武器弹药在弹道终点的飞行速度、方向等数据,系统能够对爆炸形成的初始破片飞散场进行计算.在此基础上,计算破片与目标是否交会,如果破片与目标交会,再计算交会点位置、交会时的侵彻速度、角度,在此基础上利用经典侵彻方程计算破片对目标的毁伤情况并统计结果,获得目标的毁伤效果及毁伤等级等数据.
3)侵彻弹道仿真,目前商用动力学软件进行侵彻数值模拟时,对软硬件平台要求高,计算时间长、缺乏灵活性,本文直接计算弹在侵彻介质中的运动情况,给出侵彻弹道,该算法省略了靶体网格的划分,也无需考虑复杂的接触问题以及计算中靶体大变形时网格的畸变,大大节省了计算时间,提高了计算效率.
4 仿真实验
根据毁伤评估流程设计,搭建了人机协同毁伤评估系统作为实验环境,实验环境包含图像变化检测算法和模型仿真计算算法,前端与无人机协同打击规划系统相连,按照图2所示流程进行毁伤评估实验,以小直径炸弹打击建筑为例,选择RH 自主等级,图像变化检测方法使用自动分割模式,模型仿真采用手动输入模式,专家判读采用图像增强的操作员判读模式,测试基于无人机侦察与模型仿真的人机协同毁伤评估的有效性.
4.1 数据获取与预处理
实验中使用的数据为图像数据和弹目交会参数.由于不能直接处理视频流,图像预处理包括视频抽帧、降噪等,实验图像数据为一段无人机拍摄的侦察视频中截取的图像25 张,其中打击前基准图1 张,其余通过图像处理的方式在建筑上模拟真实毁伤效果.本文实验中处理的建筑共9栋,如图7所示,有的建筑进行了多次不同的标记.

图7 实验目标建筑示意图Fig.7 Image of experimental target buildings
弹目交会参数从系统前端的无人机协同打击规划系统获取,包括:战斗部类型及参数、目标类型及参数等,例如战斗部投放点、瞄准点、速度、炸高、角度等,当不考虑其他干扰因素时,战斗部将按照预定规划到达瞄准点进行毁伤,由于规划系统和毁伤评估系统处于不同坐标系,弹目交会参数的预处理包括数据筛选和坐标转换等.
4.2 数据质量判断
操作员打开数据目录查看当前目标的相关数据并判断数据质量,图像质量的判断过程采用人为主、机器为辅的模式,系统计算出图像的灰度图、方差、图像熵、空间频率、对比度等指标,提交给操作员.由操作员结合客观指标对图像质量进行主观判断,主要针对图像明度、噪声程度、模糊程度、目标是否有较为明显的遮挡等,判断图像是否会对评估产生影响.
实验中弹目交会参数的判断过程采用机器为主、人为辅的模式,弹目交会参数来自于前端的规划系统,由系统对于各项数据的完整性进行检查,由操作员判断是否存在明显错误,例如瞄准点偏移过大、目标位置不合理等.
4.3 自主等级选择
得到图像和弹目交会参数数据质量后,结合操作员的生理、心理水平进行毁伤评估自主等级选择.考虑到毁伤评估流程较短,且各毁伤场景间相对独立,本文中的自主等级选择是一种离线的自主等级选择,即在一个场景的评估中自主等级确定后不再变化,且不影响下一场景评估的自主等级选择.
目前已有一些针对操作员生理、心理水平判断和自主等级调整的自动化算法[19],为便于针对毁伤评估进行实验,本文目前使用操作员主观定性判断生理、心理水平的模式,后续研究内容将考虑加入自动化算法进行自主等级调整,总体而言,图像质量越好、弹目交会参数越完整、操作员负荷越低,则应选择更低的自主等级,反之则选择更高的自主等级.
4.4 毁伤评估子模块
人机协同毁伤评估方法包含3个子模块:基于图像变化检测的毁伤评估、基于模型仿真计算的毁伤评估、专家判读.按照人参与程度不同,图像变化检测和模型仿真分别包含两种模式,不同自主等级中包含不同的子模块评估模式,参考自主等级划分表(表2)进行不同模式的子模块毁伤评估.

图8 基于图像变化检测的评估结果Fig.8 Assessment based on image change detection
4.4.1 基于图像变化检测的毁伤评估
基于图像变化检测的毁伤评估在人机协同毁伤评估系统的交互界面下进行,界面中共包含4个模块,分别为图像显示模块、图像处理操作模块、毁伤评估方法选择模块、多阶段毁伤评估结果显示模块.人机协同毁伤评估的步骤为:
1)操作员对加载的目标打击前后图像进行判断,是否为正确目标.
2)在确定目标无误后,进行图像场景配准;如果配准出现错误,配准结果出现残缺状、放射状,操作员可以进行手动配准校正.
3)目标分割,自动目标分割模式下,操作员对目标区域框选大致位置,系统自动进行目标分割,手动目标分割模式下,操作员使用套索进行目标分割,该模式操作较为繁琐但分割效果更好.
4)系统自动对目标区域进行变化检测、形态学处理、毁伤提取和计算得到毁伤比例并显示.
基于模拟毁伤评估图像的变化检测结果示例如图8所示,实验中使用自动分割模式,毁伤评估结果为:毁伤比例为27.729%,功能毁伤评估为重度毁伤.如使用手动目标分割模式,可以提高准确度,但会相应增加操作员负荷.
此外,实验针对如图9所示的真实打击图像进行了毁伤评估测试,评估结果为:毁伤比例为50.236%,功能毁伤评估为重度毁伤.
4.4.2 基于模型仿真计算的毁伤评估
人机协同毁伤评估系统中,基于模型仿真计算,本文设计了仿真系统.以小直径炸弹打击建筑为例,使用手动弹目交会参数模式,人机协同毁伤评估的步骤为:
1)参数输入,手动参数输入模式下,操作员进入目标模式,向算例中添加建筑,设定目标的三维坐标及朝向等信息;进入战斗部模式,战斗部选择小直径炸弹,设定参数,包括:瞄准点坐标、落点CEP、战斗部飞行速度、方位角、打击角、炸高及方差等,自动参数调用模式下,系统自动从前端规划系统获取弹目交会参数.
2)操作员通过三维漫游对搭建的算例场景进行确认,如有错误则进行调整和校正,最终搭建的算例如图10所示.
3)操作员选择系统计算模式,包括:根据目标类型选择是否进行破片计算,通常轻装甲类目标需要进行破片计算,重装甲、建筑类目标可以不计算破片以提高算法效率;选择是否进行Monte Carlo 随机计算以提高算法稳定性.
4)系统进入计算模式,自动进行数据导入、数值初始化、战斗部初始化、破片场初始化等操作.计算完毕将以三维模型的形式显示算例,并进行动态演示,如图11所示.

图9 真实毁伤图像Fig.9 Real damage image
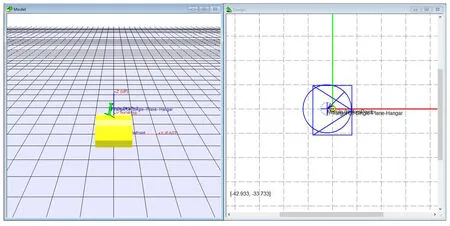
图10 算例搭建结果Fig.10 Example construction results
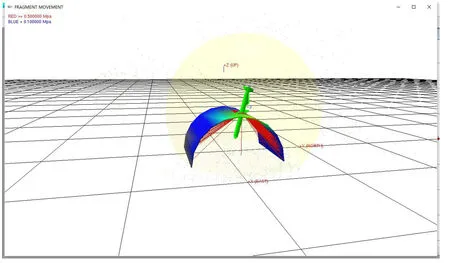
图11 模型仿真计算结果Fig.11 Model simulation results
本算例最终仿真结果为平均命中破片数为1 626.6;平均穿透破片数1 220.6;平均有效破片数1 220.6;轻度冲击波毁伤概率23.5%;中度冲击波毁伤概率76.5%;重度破片毁伤概率100%;重度综合毁伤概率100%;毁伤面积137.104,毁伤比例为41.3%,毁伤评估效果复合实际情况,仿真有效.
4.4.3 专家判读
专家判读方法中,主要依靠操作员进行判读,采用人为主、机器为辅的模式,以IA表的HR方案为基础,在图像与数据支持子任务中采用RH方案.系统显示图像配准结果便于操作员进行比对,且算法可对图像全局进行变化检测、形态学处理和毁伤提取,将变化信息与打击前图像融合,以图像增强的方式辅助操作员进行判读,最终判断结果为毁伤比例31%,功能毁伤等级为重度毁伤.
4.5 毁伤结果融合
得到3个子模块毁伤评估结果后,系统根据预设的权值,融合3个子模块的毁伤评估结果得到最终毁伤评估结果,目前本文使用基于经验的预设权值,不同自主等级下人参与的程度不同,对应子模块的权值相应不同.以实验中的目标为例,式(1)中的ki、km、ke分别取0.3、0.4、0.3,目标最终综合毁伤比例为34.19 %,功能毁伤评估为重度毁伤,符合实验情况.
5 结论
本文提出一种基于无人机侦察图像与模型仿真计算的人机协同毁伤评估方法,基于协同设计分析了毁伤评估中的人机相互依赖关系,并据此提出了人机协同毁伤评估流程,操作员结合数据完整性和自身工作负荷,选择合适的自主等级及具体毁伤评估方法,毁伤评估方法融合了图像变化检测、模型仿真计算和专家判读.经过实验验证,该方法的毁伤评估准确度较高、误判率较低、时效性较好,能够充分发挥自动化算法的高效性,并有效支持人对毁伤评估的监督干预,未来的研究方向包括:面向实时远程遥控无人机的毁伤评估;一人控制多机的毁伤评估;利用自动化算法自动判断人的状态并切换自主等级;子模块权值自学习和在线调整等[20].
猜你喜欢
军事文摘(2022年13期)2022-08-27
探测与控制学报(2022年3期)2022-07-08
爆炸与冲击(2022年3期)2022-04-11
兵器装备工程学报(2021年9期)2021-10-15
舰船电子工程(2021年8期)2021-09-09
弹箭与制导学报(2021年2期)2021-06-26
中国电气工程学报(2020年1期)2020-06-08
当代旅游(2019年3期)2019-09-19
科学与财富(2017年24期)2017-09-06
成长·读写月刊(2017年4期)2017-05-16