
越野特种运载平台自平衡任务舱设计及其控制策略研究
2020-11-17 09:43江开航皮大伟阮剑锋范晶晶
河北科技大学学报 2020年5期
关键词:车辆工程
江开航 皮大伟 阮剑锋 范晶晶


摘 要:针对某越野特种运载平台大幅度侧倾及俯仰运动下机动性提升问题,提出了一种基于双轴陀螺原理的自平衡任务舱系统结构设计方案以及基于该结构的控制方法。首先,采用Creo软件完成自平衡任务舱系统的结构建模,结合路面模型及行驶系统在ADAMS/View中搭建运动模型,将任务舱三维模型分解映射为体现侧倾和俯仰动力学的2个平面,形成侧倾和俯仰动力学数学模型,设计实时修正任务舱姿态的自平衡控制策略;其次,综合考虑不同类型路面对任务舱姿态的影响,设计基于载荷转移率的控制阈值算法,明确自平衡控制算法的工作区间;最后,在MATLAB/Simulink环境中搭建Simulink-ADAMS自平衡控制联合仿真模型,进行多种工况的虚拟试验来验证控制系统的有效性。结果表明,自平衡控制系统能够有效、实时地修正任务舱的侧倾角和俯仰角,降低越野特种运载平台侧倾及俯仰运动对于驾驶人员的影响程度。采用自平衡任务舱系统,突破了悬架的系统性能限制,提高了越野特种运载平台对恶劣越野路面的适应能力,为自平衡控制算法的仿真验证提供了模型基础。
关键词:车辆工程;特种运载平台;自平衡任务舱;控制阈值;自平衡控制
中图分类号:U463.81 文献标识码:A doi:10.7535/hbkd.2020yx05002
Abstract:The structure design scheme and the control method of a self-balancing cockpit system based on the principle of dual-axis gyro were proposed to solve the problem of improving maneuverability of special carrier platform under large roll and pitch motions. First, the structural modeling of the self-balancing cockpit system was completed by Creo, and the movement model was built in ADAMS/View in combination with the road model and the driving system of the vehicle. The three-dimensional model of the cockpit was decomposed and mapped into two planes that embody the dynamics of roll and pitch, and the dynamic mathematical model was formed respectively. Then a self-balancing control strategy for real-time correction of the cockpit attitude was designed. Second, considering the influence of different types of roads on the attitude of the cockpit, a control threshold module based on the load transfer rate was designed to clarify the working range of the self-balancing control algorithm. Finally, the Simulink-ADAMS self-balancing control joint simulation model was built in MATLAB/Simulink environment, and the virtual tests under various working conditions were performed to verify the effectiveness of the control system. The results show that the self-balancing control system can effectively correct the roll angle and pitch angle of the cockpit in real time, and reduce the impact of the vehicle roll and pitch motion on the driver. The self-balancing cockpit system breaks through the performance limitations of the suspension system, and improves the adaptability of the off-road special carrier platform to harsh off-road road surface, which provides a model basis for the simulation verification of self-balancing control algorithm.
Keywords:vehicle engineering; special carrier platform; self-balancing cockpit; control threshold; self-balancing control
越野特種运载平台是指在恶劣道路执行特殊任务(搜救、地形勘察和物资运输等)拥有上装作业机构的越野特种车辆。车辆高速行驶在不平路面时会产生侧倾和俯仰运动,过大的侧倾及俯仰运动会严重影响驾驶员的操纵能力,甚至引起驾驶员判断失误,使得车辆会因为驾驶员的身体或心理安全感的大幅下降无法发挥出车辆应有的越野机动性。因此,需要针对车身大幅度姿态变化设计自平衡任务舱系统,消除越野特种运载平台侧倾及俯仰运动对驾驶员操纵能力的影响。
越野车辆运动过程中车身姿态变化主要由路面不平度引起,具体表现在俯仰和侧倾2个自由度上。
目前国内外学者针对车辆转向过程中车辆的侧倾姿态调整研究较多,主要有以下几种控制方法:主动转向[1]、驱动/制动力矩分配[2]、反侧倾力矩[3-4]等。而针对由不平路面引起的车辆侧倾运动的研究方向较为单一,只能通过主动或半主动悬架来控制[5-7]。HER等[5]和ZHU等[6]采用主动悬架降低路面不平对车身侧倾姿态的影响;FERGANI等[7]采用半主动悬架抑制不平路面引起的车辆侧倾运动。同样的,对车辆俯仰姿态的修正也只能采用主动悬架实现[8-9]。文献[8]设计主动悬架的变增益PID控制器控制车辆加减速时的俯仰运动。QAMAR等[9]采用半主动悬架隔离不平路面对车辆的影响,控制车辆俯仰姿态。
随着变阻尼[10-12]和变结构[13-15]等其他主动悬架技术不断得到应用,越野车辆在坑道、戈壁、山地和丛林等复杂地形下的快速突进机动能力不断提高。高效可靠的悬架系统可以通过改善车身姿态来提高驾驶员在车内的操作稳定性和舒适性。但是,悬架系统性能的提升受到控制行程的限制,只能在一定程度上减小车身的侧倾和俯仰,难以应对车辆发生更大幅度侧倾及俯仰运动的恶劣行驶工况。
本文所设计的自平衡系统在车辆上几乎没有相关应用,但是在移动机器人行业已经拥有大量的研究成果。自平衡机器人主要分为2种:两轮自平衡机器人[16-17]和单球自平衡机器人[18-20]。
两轮自平衡机器人由车体和车轮2部分组成,机器人可以沿电机轴心转动,通过姿态传感器检测机器人姿态,判断其是否处于倾斜状态,驱动电机转动,使机器人保持平衡姿态[17]。单球自平衡机器人利用万向轮与底部支撑球体的摩擦产生驱动力,实现机器人的自平衡、自旋以及全方位移動[19]。目前,针对单球驱动机器人所提出的控制方法将三维模型分解映射到3个平面,不考虑平面间的耦合关系,对3个平面系统分别建立动力学模型与设计控制器[20]。
为了提高某越野特种运载平台对大幅度侧倾及俯仰恶劣行驶工况的适应能力,本文提出了一种自平衡任务舱系统结构设计方案以及基于该结构的控制方法,以充分发挥越野特种运载平台对恶劣越野路面的适应能力。
1 ADAMS/MATLAB联合仿真模型
1.1 ADAMS/MATLAB联合仿真模型的建立
越野特种运载平台的自平衡系统如图1所示。该自平衡系统采用类似双轴陀螺原理设计自平衡任务舱体,具有俯仰方向上的旋转自由度。任务舱承载体为任务舱提供侧倾方向上的旋转自由度。任务舱与任务舱承载体之间,以及任务舱承载体与车身之间均使用轴承连接。其中控制电机和蜗轮蜗杆传动机构相关参数如表1所示。
将CREO中自平衡系统三维模型导入ADAMS/View后,不参与相对运动的零件对于平台的运动与控制没有影响,进行简化处理,其余部件根据结构实际连接方式建立各零件间的连接关系和运动关系,添加相应的约束和载荷。导入行驶机构与路面后得到ADAMS/View自平衡越野特种运载平台模型。
ADAMS/View中ADAMS/Control工具能够导出一个可在MATLAB中运行的m文件,在MATLAB中运行此m文件得到与ADAMS/View结构模型等价的MATLAB/Simulink模块,这个模块包含了所建立的自平衡越野特种运载平台结构模型的信息参数,并且有数据输入、输出接口。
1.2 模型验证
根据ADAMS/View自平衡运载平台结构模型参数在Carsim中建立相对应的车辆模型,设置转向工况,车速为10 m/s,B级路面附着系数为0.8,仿真时间为5 s,仿真步长为0.01 s,模型验证见图2。
在相同车速和路径情况下,两者仿真结果存在一定程度的差异,主要表现在发生转向后2 s内的车辆状态响应上。从图2 b)可知,ADAMS/View车辆模型的横摆角速度的超调量比Carsim车辆模型高出约243°/s,并且这两者横摆角速度的峰值时间也相差约0.5 s。这说明ADAMS/View车辆模型存在一定的响应滞后,这一点在图2 a)路径中的纵向位移前20 m区域中也有所体现。
总体而言,在相同工况下,ADAMS/View车辆模型与Carsim车辆模型横摆角速度的响应趋势相同,且稳态值接近,存在的误差均在允许范围内,所建立的ADAMS/View车辆模型可以用于进一步研究。
2 任务舱自平衡控制系统设计
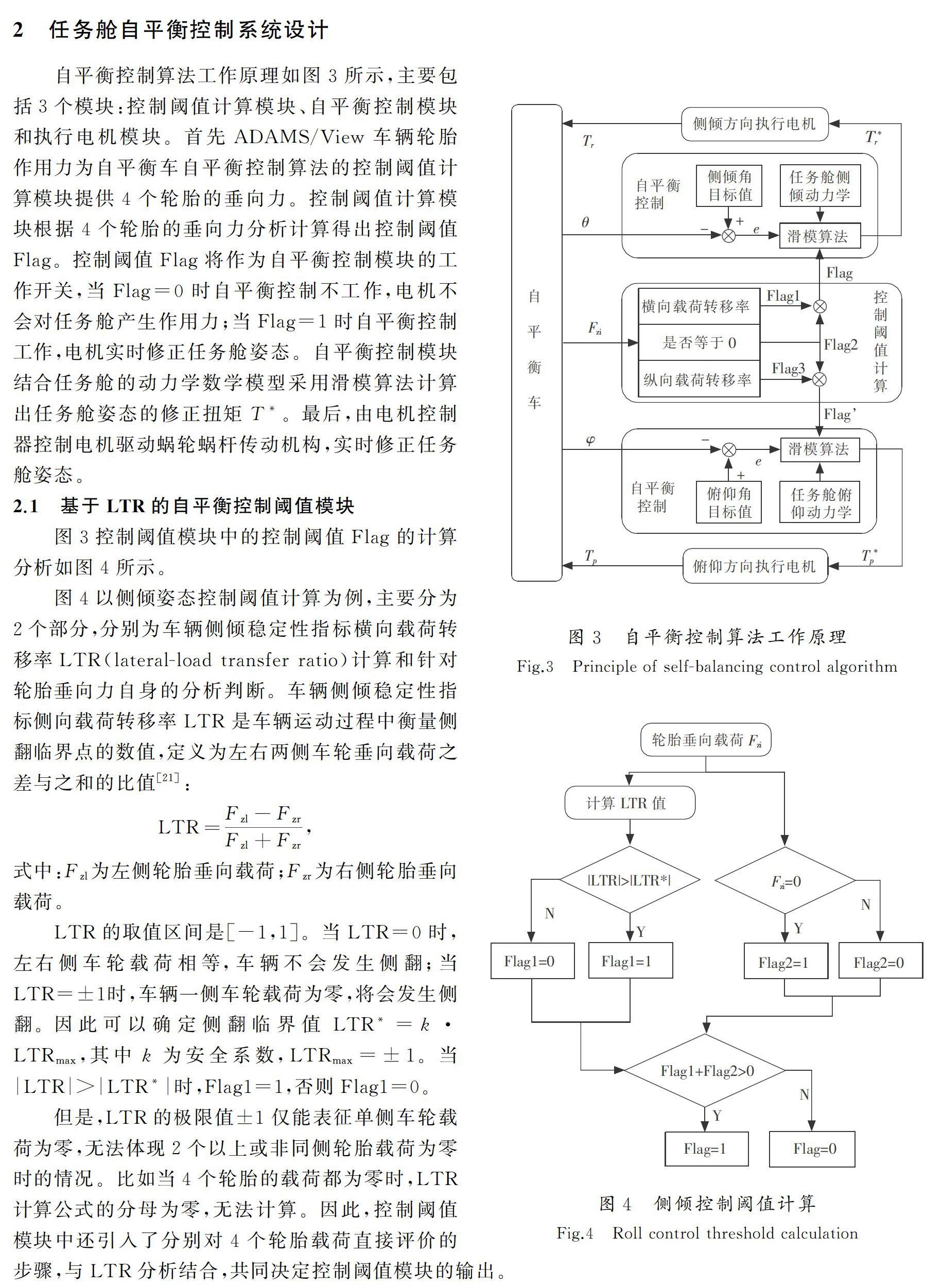
自平衡控制算法工作原理如图3所示,主要包括3个模块:控制阈值计算模块、自平衡控制模块和执行电机模块。首先ADAMS/View车辆轮胎作用力为自平衡车自平衡控制算法的控制阈值计算模块提供4个轮胎的垂向力。控制阈值计算模块根据4个轮胎的垂向力分析计算得出控制阈值Flag。控制阈值Flag将作为自平衡控制模块的工作开关,当Flag=0时自平衡控制不工作,电机不会对任务舱产生作用力;当Flag=1时自平衡控制工作,电机实时修正任务舱姿态。自平衡控制模块结合任务舱的动力学数学模型采用滑模算法计算出任务舱姿态的修正扭矩T*。最后,由电机控制器控制电机驱动蜗轮蜗杆传动机构,实时修正任务舱姿态。
2.1 基于LTR的自平衡控制阈值模块
图3控制阈值模块中的控制阈值Flag的计算分析如图4所示。
图4以侧倾姿态控制阈值计算为例,主要分为2个部分,分别为车辆侧倾稳定性指标横向载荷转移率LTR(lateral-load transfer ratio)计算和针对轮胎垂向力自身的分析判断。车辆侧倾稳定性指标侧向载荷转移率LTR是车辆运动过程中衡量侧翻临界点的数值,定义为左右两侧车轮垂向载荷之差与之和的比值[21]:LTR=Fzl-FzrFzl+Fzr,式中:Fzl为左侧轮胎垂向载荷;Fzr为右侧轮胎垂向载荷。
LTR的取值区间是[-1,1]。当LTR=0时,左右侧车轮载荷相等,车辆不会发生侧翻;当LTR=±1时,车辆一侧车轮载荷为零,将会发生侧翻。因此可以确定侧翻临界值LTR*=k·LTRmax,其中k为安全系数,LTRmax=±1。当|LTR|>|LTR*|时,Flag1=1,否则Flag1=0。
但是,LTR的极限值±1仅能表征单侧车轮载荷为零,无法体现2个以上或非同侧轮胎载荷为零时的情况。比如当4个轮胎的载荷都为零时,LTR计算公式的分母为零,无法计算。因此,控制阈值模块中还引入了分别对4个轮胎载荷直接评价的步骤,与LTR分析结合,共同决定控制阈值模块的输出。
轮胎载荷直接评价具体是指当4个轮胎中只要有一个为0即输出Flag2=1,否则输出Flag2=0。最后将所述2种评价指标相结合:当Flag1+Flag2>0时,Flag=1,否则Flag=0。即当以上所述的2种评价指标中只要有一个符合控制要求,自平衡控制模块就开始工作。
自平衡任务舱系统的俯仰姿态控制阈值与侧倾姿态控制阈值计算方法类似,主要区别在于载荷转移率的计算方式不同,侧倾姿态控制阈值模块采用的是侧向载荷转移率LTR;俯仰姿态控制阈值模块采用的是纵向载荷转移率LTR′(longitudinal-load transfer ratio):LTR′=Fzf-FzrFzf+Fzr,式中:Fzf为前轮胎垂向载荷;Fzr为后轮胎垂向载荷。
2.2 基于滑模算法的自平衡控制
自平衡控制算法设计以任务舱体为研究目标,将任务舱模型分解映射到2个平面,分别建立任务舱体侧倾和俯仰方向的动力学数学模型,采用滑模控制算法计算出任务舱体这2个自由度的修正扭矩。
同理,自平衡车任务舱的侧倾方向作用力分析如圖6所示,Ci为任务舱侧倾中心,CG为任务舱质心位置,两者距离为hrc。以顺时针方向为正,建立自平衡任务舱侧倾动力学数学模型:Ix=mjjayhrc-mjjghrcφ , 式中:Ix=1 150 kg·m2,表示任务舱绕纵轴转动惯量;φ表示任务舱侧倾角;mjj=774.38 kg,表示任务舱与任务舱载体及电机等质量之和;ay表示横向加速度;hrc=0.074 m。
与任务舱俯仰方向滑模控制算法相同,计算得出滑模控制输出如下:T*r=Ix[c22+ε2sat(s2Φ2)+K2s2]-mjjayhrc+mjjghrcφ,式中:e2=φd-φ;s2=c2e2+2;Φ2为边界厚度。
3 自平衡控制算法仿真验证
针对所设计的自平衡控制算法,设定2种不同的行驶工况,验证设计算法的正确性与控制效果,分别在良好B级25°坡道路面上和在恶劣G级路面上加速行驶。路面模型如图7、图8所示。良好B级25°坡道路面用来验证自平衡控制算法的任务舱低频大角度修正能力,恶劣G级路面用来验证自平衡控制算法的任务舱高频小角度修正能力,这两者的主要区别在于任务舱系统侧倾和俯仰角度的变化频率和变化范围不同。
3.1 任务舱低频大角度修正
在所创建的坡道上,自平衡车在2 s时开始进入坡道,其后2 s自平衡车位于坡道上时任务舱的俯仰角会发生很大变化,如图9所示,在4 s时,未进行自平衡控制的任务舱的俯仰角达到了最大值0.55 rad,约为31.5°。但是,在自平衡控制算法工作时,自平衡车任务舱的俯仰角得到了快速有效修正,最大值不超过0.11 rad,约为63°,改善了80%,证明所设计的自平衡控制算法的效果十分明显,拥有低频大角度修正能力。
图10给出了自平衡控制算法在进行俯仰角修正的过程中计算出的任务舱所需的修正扭矩,可以看出,自平衡控制算法在前2 s就开始对任务舱进行修正,这是由于自平衡车在起步过程中存在一定的纵向加速度,导致车身后倾,在1 s之前自平衡车的俯仰角在小于0(车身前倾俯仰角为正)的区域波动。后续在自平衡车通过坡道过程中,最大修正扭矩为-283.06 N·m。
3.2 任务舱高频小角度修正
自平衡车设计主要针对的是恶劣越野道路下的行驶工况,因此为了验证自平衡车在恶劣环境下的控制效果,还需要对自平衡车在恶劣G级路面行驶过程中的姿态调节进行仿真验证。仿真工况为0~5 s持续直线加速至40 km/h。
图11给出了自平衡控制工作和未控制状态下的纵向车速曲线,可以看出两者差别不大,但是在5 s时都未能够达到目标车速40 km/h(即约11.1 m/s)。路面环境非常恶劣的G级路面的最大高程差达到200 mm,给自平衡车的前进造成了很大的纵向阻力,同时导致纵向车速频繁波动。
自平衡车任务舱的俯仰角曲线如图12所示,可以明显看出所设计的自平衡控制算法可以很好地应对任务舱高频小角度修正。在有控制的情况下,任务舱俯仰角绝对值最大达到0.035 rad,比未控制下的最大值降低了0032 rad。总体上施加自平衡控制的俯仰角绝对值的平均值为0.008 3 rad,而未控制的任务舱俯仰角绝对值的平均值为0.019 2 rad,所设计的自平衡控制算法可以有效地将任务舱俯仰角与目标值0 rad的偏差缩小56.8%。
与此同时,自平衡控制算法的控制效果同样表现在自平衡车的侧倾角曲线中,如图13所示。在有控制的情况下,任务舱侧倾角绝对值最大达到0.044 rad,而未控制下的最大值则达到了0.074 3 rad,降低了40.8%。总体上施加自平衡控制的侧倾角绝对值的平均值为 0.018 7 rad,而未控制的任务舱侧倾角绝对值的平均值为0.026 1 rad,所设计的自平衡控制算法可以有效地将任务舱侧倾角往目标值0 rad处靠近。
最后分别给出了俯仰和侧倾2个方向上的修正扭矩曲线,如图14、图15所示。自平衡控制算法在俯仰方向给出的修正扭矩范围为-261.7~154.2 N·m,在侧倾方向给出的修正扭矩范围为-185.1~158.5 N·m。
4 結 论
1)设计了某越野特种运载平台任务舱的自平衡系统,在CREO中完成其三维结构建模,经过适当简化导入ADAMS/View中,通过结合不同类型的路面模型,为自平衡控制算法的仿真验证提供了模型基础。
2)所提出的自平衡控制算法依据运载平台行驶过程中轮胎垂向力的变化来判断当前路况,保证了自平衡控制算法能够在恰当的时机对任务舱姿态进行修正,实现了在25°坡道路面和在恶劣G级路面行驶过程中任务舱俯仰角和侧倾角修正能力,说明所设计的自平衡控制算法针对任务舱俯仰角和侧倾角在低频大角度和高频小角度两种不同变化模式下的控制效果十分明显。
3)对于某越野特种运载平台任务舱姿态修正未进行翻车等更加恶劣工况下的仿真验证,下一步拟进行试验平台搭建,完成自平衡控制算法的优化与验证;此外,在自平衡任务舱系统的控制过程中未考虑执行机构的响应速度问题,未来将着重提高自平衡控制算法的实时性和准确性,降低执行机构响应特性的影响。
参考文献/References:
[1] ISLAM M, HA C. Road vehicle rollover avoidance using active steering controller[C]//IEEE 2011 14th International Conference on Computer and Information Technology(ICCIT). [S.l.]:[s.n.], 2011:298-302.
[2] KANG J, YOO J, YI K. Driving control algorithm for maneuverability, lateral stability, and rollover prevention of 4WD electric vehicles with independently driven front and rear wheels[J]. IEEE Transactions on Vehicular Technology, 2011, 60(7):2987-3001.
[3] BINDER M K, KHAJEPOUR A. Optimal control allocation for coordinated suspension control[C]//Proceedings of the American Control Conference.[S.l.]:[s.n.], 2014:2126-2131.
[4] YAN Mingshuai, PI Dawei, LI Yulong, et al. The design of anti-roll moment distribution for dual-channel active stabilizer bar system[C]//Chinese Control and Decision Conference(CCDC). Shenyang: IEEE, 2018: 6301-6308.
[5] HER H, SUH J, YI K. Integrated control of the differential braking, the suspension damping force and the active roll moment for improvement in the agility and the stability[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2015, 229(9):1145-1157.
[6] ZHU Sangzhi, WANG Lifu, ZHANG Nong, et al. H∞ control of a novel low-cost roll-plane active hydraulically interconnected suspension: An experimental investigation of roll control under ground excitation[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2013, 6(2):882-893.
[7] FERGANI S, SENAME O, DUGARD L. A LPV/H∞, fault tolerant control of vehicle roll dynamics under semi-active damper malfunction[C]//American Control Conference-acc. [S.l.]:IEEE, 2014:4482-4487.
[8] AHMAD F B,HUDHA K,JAMALUDDIN H.Gain scheduling PID control with pitch moment rejection for reducing vehicle dive and squat[J]. International Journal of Vehicle Safety, 2009, 4(1):45-83.
[9] QAMAR S, KHALID U, QURESHI M B. Vehicle suspension control using recurrent neurofuzzy wavelet network[J]. Vehicle Engineering, 2015, 3:6.
[10] CHEN Chao, LIAO Weihsin. A self-sensing magnetorheological damper with power generation[J]. Smart Materials and Structures, 2012, 21(2): 1-14.
[11] 张逸昆. 基于磁流变阻尼器的车辆半主动悬架系统控制研究[D]. 哈尔滨:哈尔滨工业大学, 2018.
ZHANG Yikun. Research on Control Method of Semi-Active Vehicle Suspension System Based on Magnetorheological Damper[D]. Harbin: Harbin Institute of Technology, 2018.
[12] RODRGUEZ-LPEZ J,ELVIRA L,MONTERO DE ESPINOSA FREIJO F,et al.Measuring the yield stress in magnetorheological fluids using ultrasounds[J]. Applied Physics Letters, 2013, 102(8): 1-15.
[13] ZHANG Baozhen, KHAJEPOUR A, GOODARZI A. Vehicle yaw stability control using active rear steering: Development and experimental validation[J]. Proceedings of the Institution of Mechanical Engineers Part K-Journal of Multi-Body Dynamics, 2017, 231(2): 333-345.
[14] CHENG Gang, WANG Weidong, ZHAO Guoqun, et al. Influence of camber angle on rolling radial tire under braking state[J]. Procedia Engineering, 2011,15: 4310-4315.
[15] FARD M,JAZAR R N,VO D. Kinematics of a steering tyre with adjustable caster[J]. International Journal of Vehicle Design, 2017, 74(2): 134-152.
[16] ALMESHAL A M, GOHER K M, TOKHI M O. Dynamic modelling and stabilization of a new configuration of two-wheeled machines[J]. Robotics & Autonomous Systems, 2013, 61(5):443-472.
[17] 乔林. 两轮自平衡机器人控制策略研究[D]. 哈尔滨:哈尔滨工程大学, 2019.
QIAO Lin. Research on Control Strategy of Two-Wheeled Self-Balancing Robot[D]. Harbin: Harbin Engineering University, 2019.
[18] BONCI A, PIRANI M, ROSSI M, et al. Embedded system for a ballbot robot[C]//International Workshop on Intelligent Solutions in Embedded Systems. [S.l.]: IEEE,2015:157-161.
[19] 余義. 单球驱动自平衡机器人位姿解算与控制系统研究[D]. 武汉:武汉科技大学, 2019.
YU Yi. Research of Pose Estimation Algorithm and Control System for the Self-Balancing Robot Driven by a Single Ball[D]. Wuhan: Wuhan University of Science and Technology, 2019.
[20] 廖丹. 单球驱动机器人的建模与控制研究[D]. 成都:西南交通大学, 2018.
LIAO Dan. Research on Modeling and Control of Robot Driven by a Single Ball[D]. Chengdu: Southwest Jiaotong University, 2018.
[21] GOLDMAN R W, EL-GINDY M, KULAKOWSKI B T. Rollover dynamics of road vehicles: literature survey[J]. International Journal of Heavy Vehicle Systems, 2001, 8(2):103-141.
[22] 孔振兴. 电机式主动稳定杆系统设计与研究[D]. 南京:南京理工大学, 2017.
KONG Zhenxing. Design and Research of Electric Active Stabilizer System[D]. Nanjing: Nanjing University of Science and Technology, 2017.
猜你喜欢
东方教育(2016年8期)2017-01-17
大学教育(2016年12期)2017-01-03
大学教育(2016年11期)2016-11-16
科教导刊·电子版(2016年23期)2016-10-31
考试周刊(2016年76期)2016-10-09
大学教育(2016年7期)2016-07-27
大学教育(2016年7期)2016-07-27
考试周刊(2016年48期)2016-06-29
求知导刊(2016年11期)2016-06-20
