
液压升降式打穴机构设计及运动学分析
2020-11-17 02:19马文霄葛云沈从举贾首星李帆代亚猛张景
甘肃农业大学学报 2020年5期
马文霄,葛云,沈从举,贾首星,李帆,代亚猛,张景
(1.石河子大学机械电气工程学院,新疆 石河子 832000;2.新疆农垦科学院机械装备研究所,新疆 石河子 832000;3.农业农村部西北农业装备重点实验室,新疆 石河子 832000)
打穴机构是深施型施肥机的关键部件,该机构可以将肥料深施至作物根系附近土壤层内,能有效避免机械开沟、挖穴施肥作业翻动土壤破坏土层结构和损伤果树根系的问题[1-2].
国内外学者对打穴机构已有相应的研究.日本增子利一等[3]设计了一种土壤改良机,通过打入装置能够定量添加土壤改良剂,通过注入压缩气体实现土壤松动,能够对作物土壤起到疏松作用,有利于作物生长.新西兰怀卡托大学的Waikato AgriTech Group(WAG)研究团队针对苗圃栽培前打孔过程中存在的打孔间距、打孔尺寸不可调,打孔质量差,打孔过程中易造成土壤压实等问题,研发了一种新型打孔装备[4].Lawrence等[5]设计开发了气动式膜上打孔机,可在覆膜垄床上进行打穴作业,用于马铃薯的移栽,打穴机定位精度较高.
近年来,王金武等[6-12]对打穴机构进行了大量的研究也取得了一定的进展,主要采用齿轮传动的方式,并通过相关的运动学和动力学优化,以及通过试验验证了机构的工作性能.新疆农业大学韩长杰等[13]设计了一种多杆驱动打穴机构,运用运动学仿真分析验证了多杆机构的合理性,并进行了田间试验.李沐桐等[14]结合精密播种技术要求并运用四杆运动学原理,提出一种旱地回转扎穴式播种方式及其配套机具,适用于玉米苗期精准穴施肥.扬州大学奚小波等[15]设计了一种可移动式气动深松土施肥机,实现了松土、施肥复式作业融合,通过气爆松土注肥的方式,解决了传统施肥作业造成果树易伤根、肥料利用率低等问题.沈从举等[16]研制了1SZL-420型自激振动深松机,葫芦瓜地深松效果良好.贾首星等[17]研制了一种施用固态肥的履带自走式果园气爆深松施肥机,可以实现“气带肥” 同步松土注肥作业.
综上所述,现有打穴机构多采用齿轮传动,成本较高,打穴深度不足,需要与拖拉机配套使用.本研究采用一种双油缸驱动强压打穴的方法,设计了一种液压升降式打穴机构,能够实现果园气爆深松施肥机打穴过程中打穴插杆垂直插入土壤的作业方式,解决了自走式深松施肥机在果园打穴过程中遇到坚硬犁底层或土壤板结层打穴阻力大、打穴时间长的问题.
1 总体结构与工作原理
1.1 总体结构
液压升降式打穴机构如图1所示,由插杆、液压油缸、锤击装置、滑轨机构、导向总成组成.以双液压油缸为驱动方式,通过升降曲臂、摇杆及导向总成传递动力,使打穴插杆完成打入和提升土壤.其中4个固定铰支座安装在机具底盘上,滑轨机构固定在机具上,方向与地面垂直;2个液压油缸对称安装在2个固定铰支座上,活塞杆与升降曲臂铰接,升降曲臂另一端与导向总成铰接;锤击装置(辅助装置)固定在导向总成上随之运动.打穴机构实物图如图2所示.
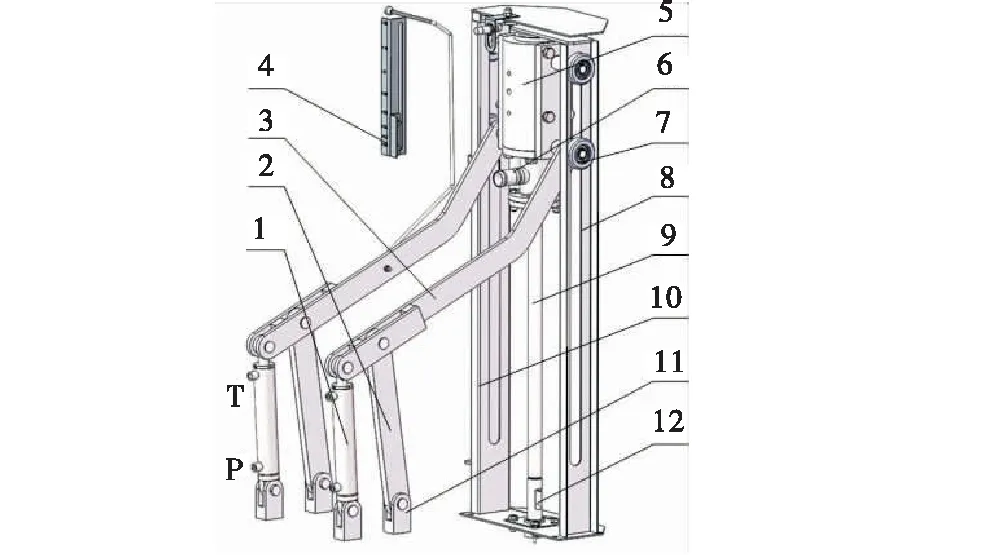
1:液压油缸;2:摇杆;3:升降曲臂;4:标尺;5:锤击装置;6:注气注肥联通器;7:导向总成;8:滑轨机构;9:施肥插杆;10:滑轨机架;11:固定铰支座;12:喷气肥口.1:Hydraulic cylinder;2:Joystick;3:Lifting crank;4:Ruler;5:Hammering device;6:Gas injection and fertilizer injection connector;7:Guide assembly;8:Slide rail mechanism;9:Fertilization rod;10:Slide rail frame;11:Fixed hinge support;12:Gas and fertilizer nozzle.图1 液压升降式打穴机构结构图Figure 1 Structure diagram of hydraulic lifting hole punching mechanism

图2 打穴机构实物图Figure 2 Physical diagram of punching mechanism
1.2 工作原理
液压升降式打穴机构由偏置曲柄滑块机构(手摇唧筒机构)演化[18]而成.打穴机构以双液压油缸作为动力源,插杆在导向总成带动下在固定滑轨机构上具有特定的运动.具体工作过程如下:果园气爆深松施肥机行驶到施肥位置时,开始进行打入工作,液压油从进油口 P 进入推动活塞杆往上运动,双油缸活塞杆驱动升降臂带动导向总成沿滑轨机构的滑道向下滚动,插杆垂直向下运动完成打入工作.当实现“气带肥” 同步松土注肥作业后液压油从进油口 T 进入推动活塞杆往下运动,双油缸活塞杆驱动升降臂带动导向总成沿滑轨机构的滑道向上滚动,插杆垂直向上运动完成垂直提升.行驶至下一工作位置时,以上过程周而复始,完成打穴作业.
1.3 主要技术参数
根据果园根系分布特征[19]以及深松施肥要求,要满足2.5~4.0 m 不同行距果园的通过性要求,确定果园气爆深松施肥的农艺要求及相关参数设置如表 1 所示.

表1 果园气爆深松施肥农艺要求
2 运动学分析
打穴插杆在打入土壤过程中会遇到坚硬的犁底层和土壤板结层,当打穴插杆垂直打入土壤中阻力较小,可以减小作业功耗,同时可以降低打穴过程中对果树根系的损伤程度.因此,要求打穴插杆在水平方向上没有变动,即运动轨迹要求是一条竖直的直线.同时为保证整机设计的紧凑型和肥箱以及其他机构的安装,要求液压缸的行程不宜过大.打穴过程通过液压油缸驱动,油缸活塞杆行程决定插杆的打穴深度.确定活塞杆与升降曲臂铰接点的运动轨迹便可确定液压缸的行程,因此,需对打穴机构进行运动学分析.
考虑机具的紧凑性和安全性,防止机具在有一定坡度的地面上行驶过程中插杆与地面接触,插杆底部安装在距离地面251 mm位置处,此时打穴机构铰接点C距离地面1 223 mm,首先根据打穴深度确定铰接点C的终点位置,然后确定C点的最大行程为1 012 mm.

A、B、C、Q为机构初始安装位置点,此时油缸行程为0;A1、B1、C1、Q1为终止位置点此时油缸行程达到最大;α指CQ与y轴负方向的夹角,β指MN与BN的夹角.A,B,C,Q are the initial installation positions of the mechanism,and the cylinder stroke is 0 at this time;A1,B1,C1,and Q1 are the end positions and the cylinder stroke reaches the maximum;α refers to the negative direction of CQ and y axis,and β refers to the included angle between MN and BN.图3 液压升降式打穴机构运动简图Figure 3 Schematic diagram of movement of hydraulic lifting hole punching mechanism
构建液压升降式打穴机构运动简图如图3所示,以液压升降式打穴机构插杆末端初始安装位置O为原点,水平方向为x轴方向,竖直方向为y轴方向建立平面直角坐标系.分析机构关键点的运动学方程,初定常量为:固定铰支座M、N的长度lMN(mm),摇杆BN的长度lBN(mm),O点到线段MN的垂直距离l1,N点到y轴的垂直距离l2,升降曲臂的尺寸.机构初始安装位置摇杆BN与MN的夹角β(82°),液压缸安装在M(763,183)位置处.C和C1表示打穴机构导向滑轮初始安装位置和插杆打入土壤最深处的状态,lAM、lA1M分别对应液压缸最小和最大行程的长度.通过逆向求解液压缸活塞杆与升降曲臂铰接点A的位置坐标,建立打穴机构关键铰接点运动学方程.
由图3可知,打穴机构杆件有下列几何关系:
lBCsin(α+∠BCQ)-lBNcosβ=l2
(1)
升降曲臂与摇杆铰接点B的运动方程为:
C点的运动方程为:
C点的速度方程为:
升降曲臂与活塞杆铰接点A的运动方程为:
把(2)式代入整理得A点的运动方程为:
液压油缸的行程:
S=lA1M-lAM
(7)
式中,∠BCQ=19°,∠ACQ=20°,∠MNB=82°,∠MNB1=112°,lAB=115mm,lBC=698 mm,lAC= 810 mm,lBN=400 mm,lMN=145 mm,l1=183 mm,l2=518 mm.将以上数值分别代入相应计算公式,求得S=190 mm,即液压缸行程确定为190 mm.液压升降式打穴机构具体尺寸如表2所示.
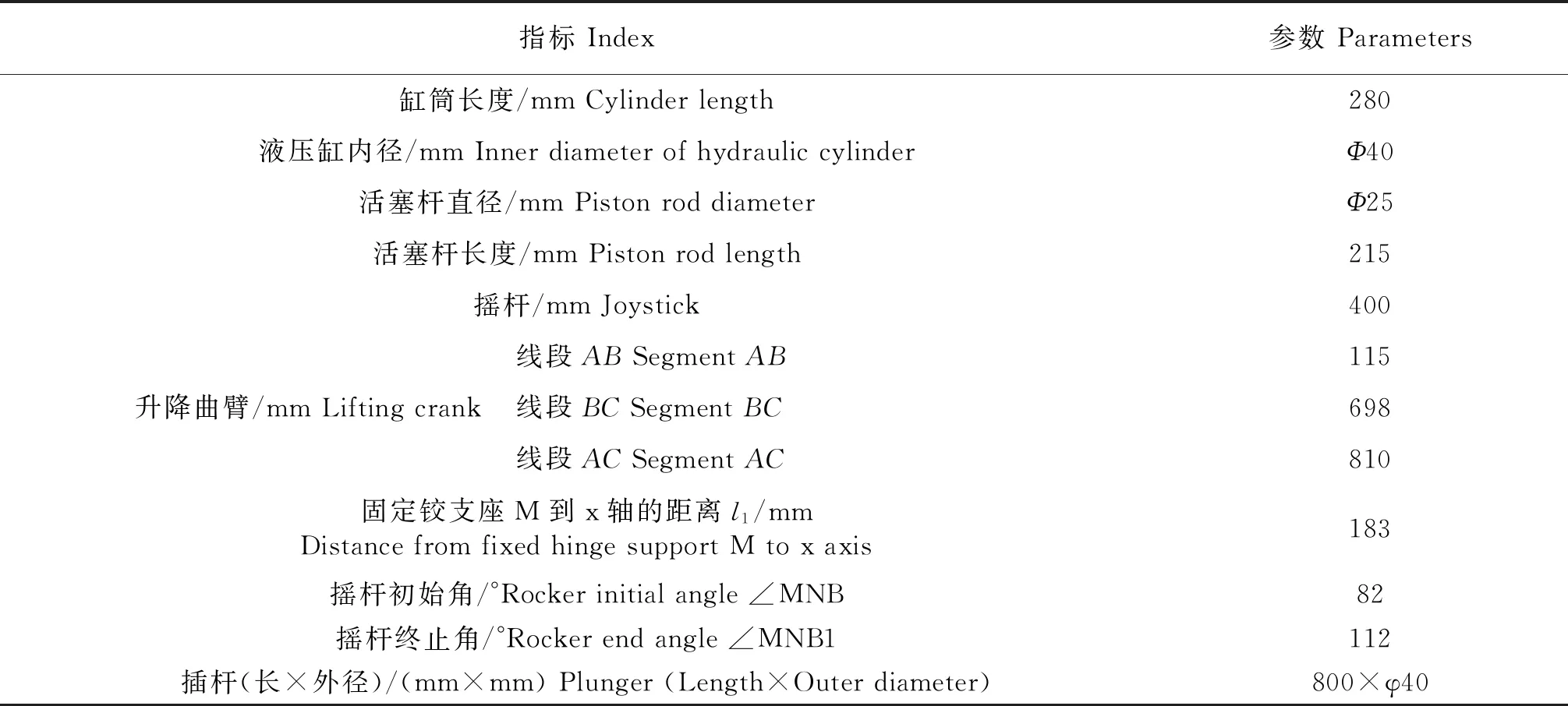
表2 液压升降式打穴机构各构件参数表
3 打穴机构ADAMS运动仿真分析
针对上述机构参数对打穴机构进行结构设计,并利用三维造型软件Solidworks完成打穴机构三维虚拟装配,将装配体导入Adams[20],并对缸筒与活塞杆之间添加移动副,滑轮与滑轨之间添加移动副,铰支座与缸筒、摇杆,升降曲臂与活塞杆、摇杆之间添加转动副,其虚拟仿真模型如图4所示,得到打穴机构摇杆和杆与升降曲臂铰接点B的轨迹如图5所示.添加完约束后在液压缸与活塞杆上添加0.05*time移动函数,重力加速度默认为 -9.806 65,设置仿真步数为200,工作步长设置为0.01,仿真时间为4 s,对其进行运动仿真.

图4 液压升降式打穴机构运动简图Figure 4 ADAMS virtual simulation model
运动初期受活塞杆推力作用液压缸逆时针旋转,摇杆也逆时针旋转,铰接点B的横坐标增大,纵坐标减小,当旋转至与水平面的极限位置(仿真时间为1.0 s,β=65°)时,此时摇杆开始顺时针旋转,B点的横坐标开始减小,纵坐标开始增大,当摇杆旋转至与水平面垂直(仿真时间为3.0 s,β=90°)时,B点横坐标继续减小,纵坐标也开始减小.位移曲线的斜率表示速度,由图5可知,B点横坐标位移图斜率先减小后增大,对应的速度图像也是先减小后增大.B点位移图像纵坐标出现两次峰值,其对应速度图像的速度大小亦有两次为零.从速度图像可知,在整个过程中无明显冲击,运动较平稳.

图5 B点仿真位移、速度图像Figure 5 Simulation of displacement and velocity at point B
打穴机构活塞杆与升降曲臂铰接点A的轨迹如图6所示,铰接点B的横坐标与A点类似,运动过程亦无明显冲击,满足机构运动的合理性.由喷气肥口轨迹图7可知,喷气肥口沿Z轴纵坐标竖直下降,在水平方向上没有改变,满足机构设计的要求.
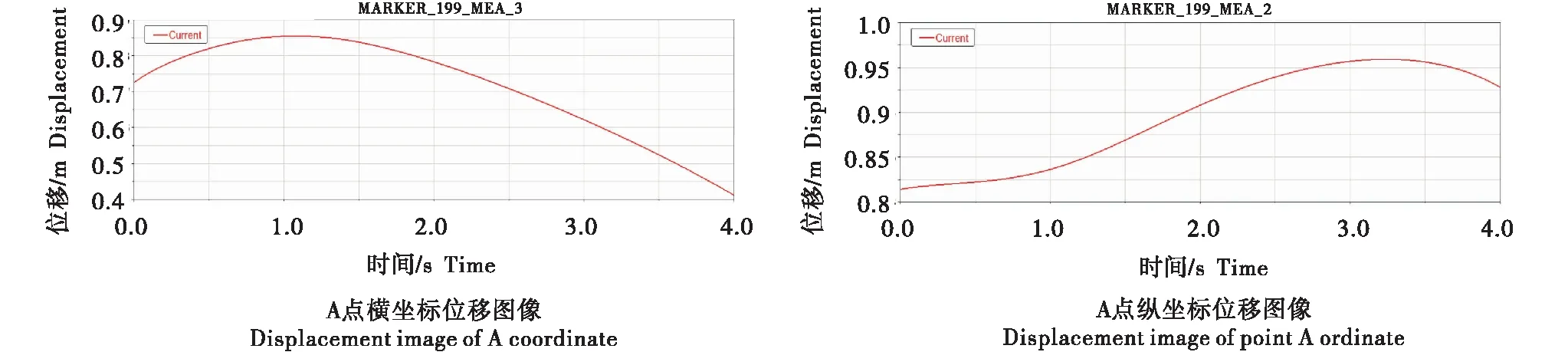
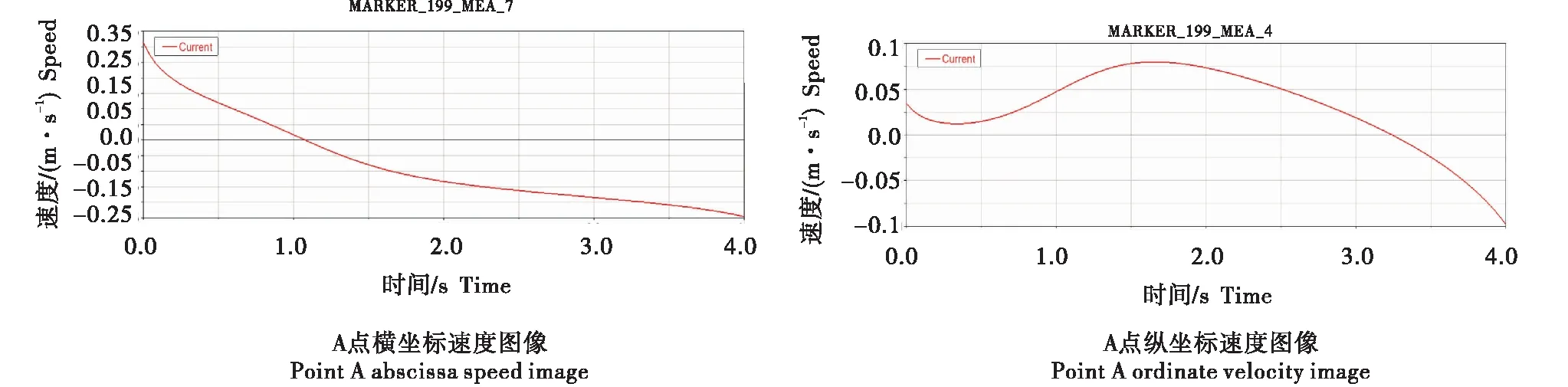
图6 A点仿真位移、速度图像Figure 6 Simulation of displacement and velocity at point A

图7 喷气肥口仿真位移图像Figure 7 Displacement image of air jet fertilizer port simulation
利用ADAMS软件仿真分析打穴机构运动情况,如图8所示.

图8 ADAMS运动仿真轨迹Figure 8 ADAMS motion simulation trajectory
仿真结果表明,打穴机构工作过程中,图中A点做抛物线运动,B点绕杆件BN做圆周运动,滑块C受滑轨约束做上下直线运动.打穴机构能够实现预期的轨迹姿态,各个杆件之间不存在干涉情况,满足液压升降式打穴机构的工作要求.
4 液压升降式打穴机构打穴性能试验
4.1 试验条件
试验地选在新疆生产建设兵团第二师二十九团园艺二连库尔勒香梨示范园,果园地形平坦.果园气爆深松施肥机由烟台嘉华车辆部件有限公司试制(图9).

图9 果园气爆深松施肥机及打穴机构Figure 9 Orchard gas explosion deep pine fertilizing machine and hole punching mechanism
土壤含水率和土壤坚实度是影响打穴插杆打入土壤中所受阻力的两个重要因素,影响打穴的工作效率.且土壤坚实度与插杆所受阻力成正比,因此有必要对打穴插杆试验地进行土壤含水率和土壤坚实度的测定.
试验仪器设备主要包括:浙江托普仪器有限公司生产的 TZS-Ⅰ型土壤水分测量仪(相对百分误差:≤ 3%),浙江托普云农科技股份有限公司生产的TJSD-750 型土壤坚实度测定仪(测量精度:±0.5%),以及钢卷尺、皮卷尺、秒表、小铁铲等[2].试验地块(长×宽)为80 m×60 m,土壤含水率为41.1%.选取5个测点,在0~10、10~20、20~30、30~40、40~50、50~60、60~70 cm土壤深度位置处用土壤坚实度测定仪测定土壤坚实度,测定的相关数据如表3所示.

表3 土壤坚实度测定值
4.2 试验方法
在上述测点附近进行试验.根据果园根系分布特征,初定打穴深度为650 mm.每次控制打穴深度(650 mm),测定打穴时间.具体试验步骤如下:气爆深松施肥机行驶至定点位置后,按下“打穴”按钮时同时启动秒表,观察打穴机构标尺,当打穴深度达到650 mm时,关闭秒表然后读数并记录,以上过程重复5次.
4.3 试验结果与分析
试验数据如表4所示.
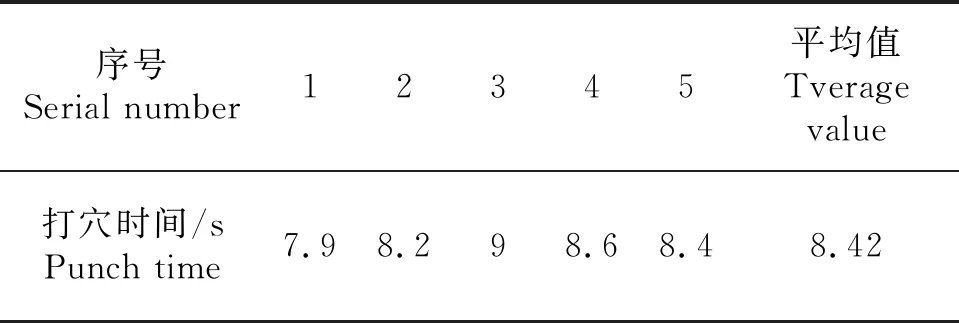
表4 试验数据表
通过试验测试结果可知,液压升降式打穴机构采取液压传动的方式,输出的力较大,工作比较平稳,易于实现快速起动、制动和频繁地换向,实现往复直线运动.该机构较好地实现果园气爆深松施肥机打穴过程中打穴插杆垂直插入土壤的作业方式,且入土垂直度较高,平均值为88.73°.打穴效果如图10所示.打穴深度达650 mm时,平均打穴时间为8.42 s,该机构具有较好的稳定性;5个测点中测点1土壤坚实度最大值最小为2.98 Mpa,打穴时间最短为7.9 s,测点3土壤坚实度最大值为3.61 Mpa,打穴时间最长为9.0 s,满足果园打穴深施的技术.
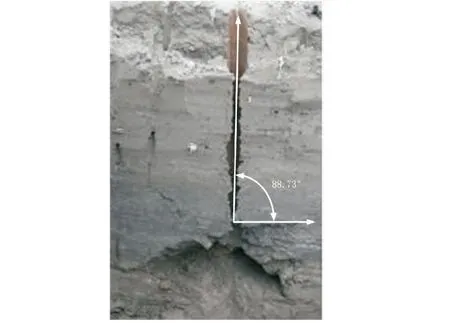
图10 打穴效果图Figure 10 Punching effect picture
5 结论
1) 设计了一种液压升降式打穴机构,通过控制液压油缸的行程可以控制打穴(施肥)深度,在液压油缸强压和锤击装置的联合作用下,可以满足坚硬犁底层或板结层的快速打穴作业,减少了打穴时间,提高了作业效率.
2) 通过对液压升降式打穴机构进行运动学分析,建立了打穴机构运动学模型,通过逆向分析确定了液压缸的行程及活塞杆顶端的轨迹,行程S=190 mm;通过ADAMS仿真软件验证了模型的准确性.
3) 进行了田间试验,验证了机构的可靠性和稳定性,打穴时间最短为7.9 s,打穴深度650 mm,打穴孔直径为40 mm,入土垂直度较高,工作效率为225穴/h,试验结果表明液压升降式打穴机构能够满足果园深施肥打穴的农艺要求.
猜你喜欢
佛山陶瓷(2022年8期)2022-11-23
农业工程学报(2022年1期)2022-03-25
科技尚品(2021年7期)2021-09-12
装备维修技术(2021年42期)2021-03-15
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
卷宗(2020年6期)2020-04-23
机电工程技术(2020年2期)2020-03-26
通信产业报(2018年21期)2018-08-20
中南大学学报(自然科学版)(2016年2期)2017-01-19
