基于Scott变压器的单相平衡供电方法及装置
2020-11-17 08:04焦兵临邓才波
江西电力 2020年10期
焦兵临,邓才波
(1.江西森田电力设备有限公司,江西南昌330012;2.国网江西省电力有限公司电力科学研究院,江西南昌330096)
0 引言
由于地理条件及投资经济性的限制,农村电网0.4 kV 低压供电系统中存在大量单相分支线负荷,部分台区单相支线负荷甚至可以达到配变容量的1/3以上,直接接入造成低压配网严重不对称运行,不仅造成配变和线路单相过载和电压不平衡,引发设备烧损和电压质量问题,影响配网供电可靠性;同时配网三相不平衡运行还造成低压线路及配电变压器的容量损失和电能损耗[1-2],影响线路和配变的经济运行。
目前实现单相负荷三相平衡功能的方法和装置主要包括以下几个方面。文献[3-4]通过电容及电感在相间转移有功功率并进行无功补偿达到使单相负荷变换成三相平衡负荷的作用。但该方式的响应速度慢,参数调整困难,一般应用于大型稳定负荷,通过配置固定电容电感实现三相平衡。后续技术发展通过电力电子器件进行电容电感的投切,扩展了该方式的应用范围,但仍存在电容电感需要分级投入、参数匹配困难的问题。文献[5]采用三相变单相电力电子变压器的方式实现三相变单相电能变换和功率因数补偿的目标,但成本较高,控制相对复杂[6-9],对工作环境要求较高,故障后无法继续对负荷供电,应用于低压配网可靠性低。文献[10-11]利用三相四线制补偿装置直接对单相不平衡负荷进行补偿,具有较好的补偿精度和动态性能,但补偿容量较大,装置成本较高,运行时损耗较大,经济性有待提高。目前可靠性较高的方案是基于Scott等平衡变压器的设计方案,但是这类变压器的平衡能力是有限的,无法实现严重不对称情况下的完全平衡。文献[12-14]在平衡变压器的基础上附加电力电子装置进行两相供电补偿,可以在兼顾可靠性的基础上实现不平衡度的进一步降低。然而,两相供电装置进行单相供电时,需要补偿的容量较大,补偿经济性较差。文献[15]利用Scott变压器及电容移相实现了三相到单相的直接变换和平衡,但响应速度较慢,无功出现了过补,造成原边线路功率因数低,线损增加。
针对农村0.4 kV低压配网单相大负荷直接接入三相四线系统造成台区严重三相不平衡的情况,文中提出了基于Scott变压器绕组串联的电力电子补偿方案实现三相变单相平衡供电方法。该方法结合了特殊变压器和电力电子设备的优点,兼顾供电可靠性和经济性,利用特殊变压器初步降低三相不平衡度,然后进一步利用电力电子设备实现负荷三相的完全平衡。
Scott 变压器其二次侧两相电压是正交的,因此常规的三相平衡控制策略无法满足其控制要求,需要提出新的方法进行平衡补偿。
1 传统Scott变压器供电方式分析
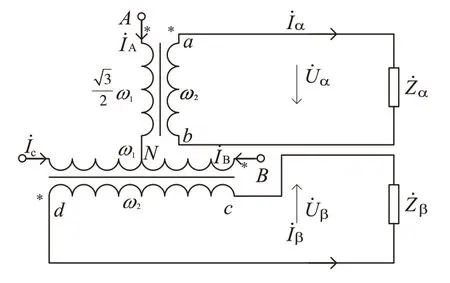
图1 Scott变压器传统供电方式
Scott 变压器原边与副变电流满足式(1),其中k为ω1/ω2。

定义三相电流不平衡度

考虑极端不平衡情况,当存在一个单相大负荷直接接入三相四线系统时,三相电流不平衡度为1.414;而该单相负荷通过Scott变压器的副边任意一相接入三相四线系统时,三相电流不平衡度为1。如果两相负荷直接接入低压三相四线系统时,根据副边两相电流的大小不同原边三相电流不平衡度范围为0.707~1.414,而两相负荷通过Scott 变压器副边接入低压三相四线供电系统,三相电流不平衡范围为0~1,且两相负荷越接近时,平衡作用越明显。
2 Scott变压器单相平衡供电方式
传统Scott 变压器供电时,虽然对单相和两相负荷具有一定的平衡作用,但实际运行中,两相负荷很难达到完全相同,即完全平衡难以实现,且单相供电时,原边三相不平衡度仍然较大。
将Scott 变压器进行特殊变比设计,M 变和T 变中间抽头的额定变比分别为(0.23:0.163)kV 和(0.4:0.163)kV,将副边绕组串联可以直接对单相负荷供电,适用于三相四线主干线路某节点存在大负荷单相分支出线的场合,同时采用两相三线逆变桥进行电流平衡补偿,可以使Scott 变压器原边达到完全平衡且功率因数为1。单相平衡供电方式如图2所示。
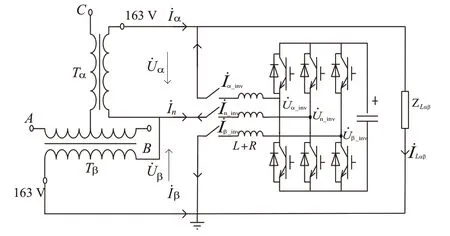
图2 Scott变压器单相平衡供电方式
2.1 指令电流计算方法
如图2 Scott变压器单相平衡供电方式相对于其传统供电方式,并未影响变压器原副边的电压电流关系,因此其三相平衡条件并未改变。要使平衡变压器原边三相平衡且功率因数为1,只需要满足副边电流大小相等,互为正交,且与电压同相。将平衡变压器所接带单相负荷及补偿电路的电流通过相量图表示,得到图3。

图3 单相平衡供电方式相量图
为使Scott 变压器原边三相电流完全平衡,且功率因数为1,需要满足副边两相电流大小相等,且全为有功电流,即

其中,Pα、Pβ及Qα、Qβ分别为 Scott 变压器补偿之后的α 相、β相的有功和无功,PLαβ为负载有功。进一步根据的电压关系可以计算得到

将补偿后的电流和与负载电流相减,可以得到指令电流与负载电流的关系如式(2)所示。
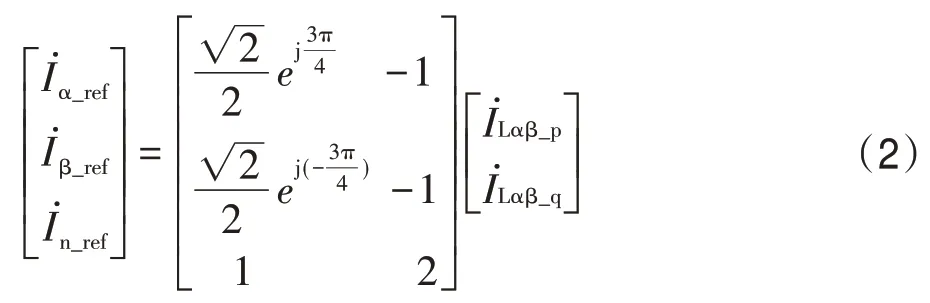
设α相电压和β相电压为


指令电流获取之后,逆变器另一方面还需要保持直流侧电压的稳定,因为直流侧电压的稳定是逆变器工作的基础。由图3可以看出,逆变器a相输出指令电流上的投影与b相输出指令电流上的投影大小相等,均为且方向相反。因此逆变器对Scott变压器不平衡补偿所产生的有功功率只在α 和β 相之间流动,直流侧电压的控制理论上无需交流侧有功功率的注入或吸收,装置只需要从交流侧吸收很少量的有功功率对逆变器的IGBT及电感等损耗进行补偿即可保持直流侧电压的稳定。因此采用传统PI控制具有控制简单,无差跟踪的效果。
2.2 电流跟踪控制方法
无差拍控制算法是一种基于预测的离散控制算法,具有响应速度快、跟踪无过冲、输出电流畸变小、对系统参数不敏感等优点,是一种实用化的电流跟踪控制方法[16-17]。本装置中,逆变器相当于受控电流源,控制指令为上一节计算得到的指令电流,被控对象为逆变器输出电流,控制目标为逆变器输出电流精确迅速跟踪指令电流,控制过程中间变量为逆变器输出电压。
为方便分析,简化装置a相等效电路如图4所示,Ua为电网a相电压,忽略其内阻,R、L为输出滤波器等效阻抗,ua_inv表示装置三相桥a 相输出电压,Ua为Scott变压器Ua相电压,ia_inv为装置Ua相输出电流。

图4 补偿装置单相等效模型
由装置ua_inv相等效电路图可以得到装置三相系统方程如式(4),其中电压电流均为瞬时值,ua值为0。

由式(4)可得系统的状态方程为


解式(5)微分方程可得时域解为

对式(6)进行离散化,可得

其中H=eATs;G=(eATs-I)A-1B;I为单位矩阵;Ts为采样的时间间隔。
对于电压型逆变器,其交流侧输出U(k)与直流侧输入Udc存在如下关系。

其中,d(k)表示第k时刻系统的脉宽控制量。
那么式(8)改写为

由式(9)可以看出,如果在第k时刻预测求出第k+1时刻系统的参考状态Xref(k+ 1),通过计算获得的脉宽控制量d(k)作用于三相逆变桥,系统第k+1时刻的状态X(k+ 1)恰好等于参考状态,即可实现系统状态(三相逆变桥的输出电流)的无差拍控制。
采用线性插值对第k+1 时刻的参考指令电流进行预测

参考值ix_ref(k),ix_ref(k- 1)取自指令电流计算模块即ix_ref的当前和上一采样周期计算值,最终可以得到各相的脉宽控制量dα(k),dβ(k)和dn(k)。由于无差拍控制考虑了补偿点电压前馈,所以算法可以有效抑制补偿点电压的波动对电流跟踪控制性能的影响。
具体应用于程序时,装置输出滤波电感中的电阻值相对于电感值很小,可以忽略。同时考虑各种误差带来的计算偏差,必须将脉宽乘以相应的比例系数K,控制时改变比例系数K,寻求一个最优值,得到最后的调制脉宽为:

电流跟踪控制包括三个环节,控制算法环节、逆变桥环节、输出滤波环节。在这三个环节中,控制算法环节和采用的控制方法有关,逆变桥环节和逆变桥的直流侧电压、开关频率相关,输出滤波与其电感感值有关。在这几个环节中,逆变桥等效为惯性放大环节[16]:

式中,KPWM为逆变桥脉宽调制的增益,对于SVPWM调制方式
Ts为延迟时间,一般为1个开关周期。
根据公式(11),设计无差拍控制器的增益为

结合公式(12)和(13),可得无差拍离散闭环控制系统框图如图5。相对于传统的PI控制,文中所提的无差拍控制参数仅有1个待定参数Ts,因此对参数整定进行计算。无差拍控制参数可以通过主回路器件参数和算法直接计算获得,减少了程序调试的工作量。同时无差拍控制对电网电压的干扰作用具有前馈校正的作用,降低了电网电压扰动对系统补偿效果的影响。
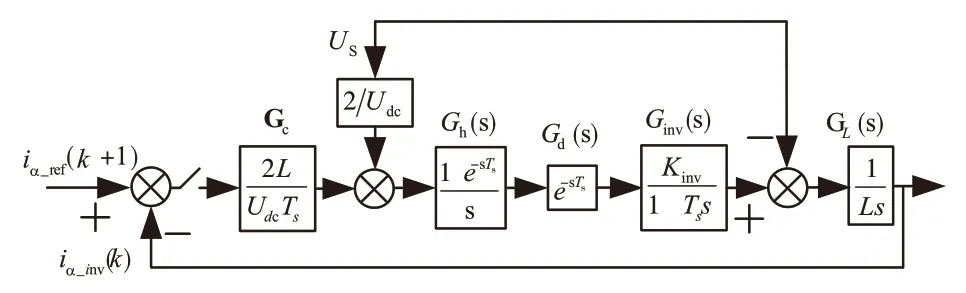
图5 无差拍闭环控制框图
文中的设备参数如表1所示。

表1 本文所提装置主要设备参数
Ts分别取 0.2 ms、0.1 ms、0.05 ms,绘制电流跟踪控制开环及闭环波特图如图6所示。

图6 无差拍控制波特图及阶跃响应
图6中的结果如表2所示。

表2 不同控制周期下无差拍控制性能对比
在 0.2 ms、0.1 ms 和 0.05 ms 不同控制周期上,控制系统均具有较好的稳定性,幅值裕度、相角裕度一致;控制周期对控制系统的影响主要体现在精度及跟踪性能上,控制系统截止频率差别较大,被控频率点(基波50 Hz)的幅值增益和相角滞后差别明显,0.05 ms及更短的控制周期具有明显的性能优势。综合考虑控制需求及装置损耗,选择0.05 ms/20 kHz 作为控制系统的采样控制周期/频率。
综上所述指令电流计算方法、直流侧电压控制及电流跟踪控制形成装置补偿部分双闭环控制框图如图7 所示,具有控制结构简单,控制参数整定方便的优点。

图7 平衡供电装置补偿部分控制系统框图
3 仿真与实验
为了验证文中装置及控制方法的有效性,利用POWERSIM 搭建三相变单相平衡供电系统模型进行仿真验证。仿真系统电源电压为0.4 kV,Scott 变压器M 变和T 变/中间抽头的额定变比分别为(0.23:0.163)kV 和(0.4:0.163)kV,M 变和T 变二次侧电压相互正交,将中间抽头串联后输出额定电压0.23 kV。仿真采用的两相三线补偿装置的输出滤波电感Lα=Lβ=Ln=0.4 mH,直流侧电容 10 000 uF,直流侧电压指令为700 V。逆变器采用20 kHz 采样控制频率,滤波器采用二阶butterworth 数字低通滤波器,电流跟踪控制算法比例参数2L(Udc×Ts)直接计算为0.023,直流侧 PI 控制参数分别为 0.5 和 0.000 5,K 值采用仿真及调试根据实际效果确定。
从图8、图9 及表3 的仿真电流、功率波形及数据可以看出,原边三相电流及功率在平衡供电系统补偿部分投运后2 个周期内即可实现系统无功完全补偿,有功平衡分配至原边三相的目标,验证了供电系统在两相/单相供电时优良的补偿和平衡性能。

图8 单相供电时补偿前电流及功率情况

图9 单相供电时补偿后电流及功率情况
图 8、图 9 中,time 轴为仿真时间,单位为 ms,上图I轴表示电流,单位为A,中图和下图P/Q 轴代表功率,下标αβ代表供电系统副边,下标a、b、c 代表供电系统原边。
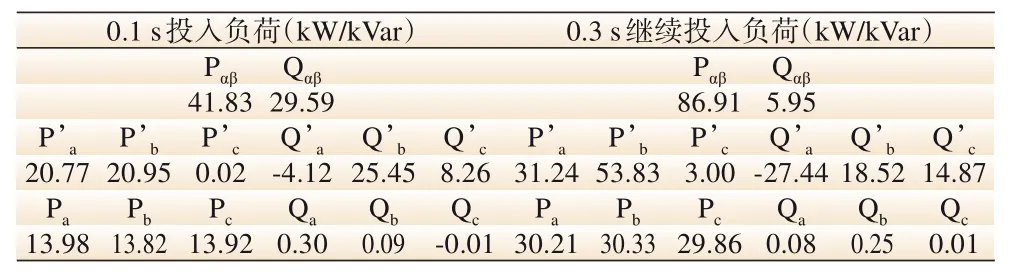
表3 单相供电时补偿前后功率数据
表3 中,上标’表示补偿前的原边功率,无上标’表示补偿后的原边功率。
图10 中,电网电压设置为分别在0.1 s 从220 V突变至225 V,在0.3 s由225 V 突变至205,由图10 可以看出,电网电压的波动确实会造成补偿部分直流侧电压和Scott 变压器原边电流的补偿效果,但直流侧电压波动在10 V 以内,变压器原边电流由于电压的变化导致负荷发生变化,其不平衡补偿效果并未受到明显影响,验证了电压前馈在控制方法中对直流电压和输出电流的稳定作用,说明控制方法对电网电压波动具有有效的抑制作用。

图10 电压波动时装置直流电压及原边电流
为了进一步验证文中所述方法的可行性,搭建了如图11基于Scott 变压器的两相/单相平衡供电系统实验平台。平台采用了一个20 kVA的Scott 变压器,M变和T 变/中间抽头的额定变比分别为(0.23:0.163)kV 和(0.4:0.163)kV。三相四线制逆变桥补偿部分采用两电平结构,滤波电感为0.4 mH,直流侧电压设定值为700 V。考虑到配网负载功率因数一般较高,实验平台采用了电阻丝盘进行实验验证,每一个电阻丝盘为5 Ω。

图11 单相平衡供电方法实验平台
图12、图13 中信号ch1-ch3 分别代表原边A/B/C三相电流,表4 中各符号代表含义与表1 相同。从实验波形及功率数据可以看出,补偿后三相电流基本平衡,相位相差2π/3,补偿瞬态过程约为2 个电网周期,说明基于Scott变压器的单相供电方法及装置具有良好的负荷平衡能力。

图12 单相负荷补偿前原边电流波形

图13 单相负荷补偿后原边电流波形
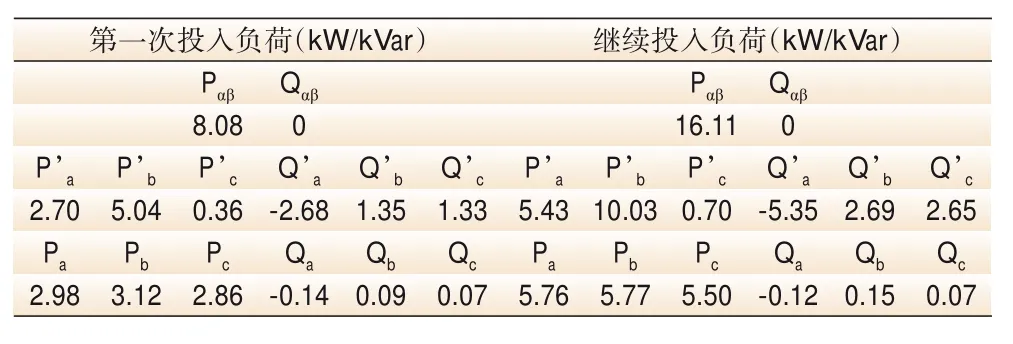
表4 单相负荷补偿前后原边三相功率
4 结语
两相三线制补偿配合Scott变压器形成的三相变单相平衡供电方法及装置,可以实现低压单相负荷的无功补偿和有功的三相平衡分配。在该供电方式中,无论单相负荷是何种性质都可以通过两相三线制逆变器进行完全补偿,特别适用于农网台区单相大负荷入户线分接点处应用。在一些三相四线架线困难但单相负荷较重造成台区三相不平衡的场合具有较好的应用前景,为台区三相不平衡治理提供了一种新型有效的治理方式。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22