
基于流场感知的小型飞行器姿态控制
2020-11-17 07:27朱苏朋符文星孙文桃
导航定位与授时 2020年6期
朱苏朋,符文星,杨 军,孙文桃
(西北工业大学航天学院,西安 710072)
0 引言
近年来,人们越来越关注小型飞行器的发展。小型飞行器具有质量小、尺寸小、成本低、结构简单、隐蔽性好等优点。从20世纪90年代以来,人们就开始应用小型飞行器以应对大型飞行器或人类无法解决的问题。美国航空环境公司在1987年生产的第一架手掷发射背包式无人驾驶飞行器标志了小型无人飞行器时代的来临。小型飞行器典型的应用有:边境监视、电路侦查、国土安全和通信中继等。
由于显著地减小了外形尺寸,小型飞行器一般做低空近距离飞行。而低空复杂的气流环境给飞行器带来了极大的挑战。首先,相比于传统大型飞行器,小型飞行器的飞行速度要慢得多,其飞行速度与风速在同一量级,所以风对于飞行器的影响很大。机翼上升力的突然变化和当地气流的影响都可能使小型飞行器失去方向和姿态控制。其次,小型飞行器可能应用在城市环境,当小型飞行器在城市中的高大建筑和其他障碍物之间穿行时,其周围的流场环境将更为复杂。Walshe[1]描述了干扰强度随着高度和地形的变化,研究表明,在低空城郊环境下干扰强度变化大于15%。Roth[2]提供了城市中干扰的复杂状况,研究表明,在离地面数米处10s内干扰强度变化大于40%。已经有很多文献证实了干扰给小型飞行器姿态控制系统带来了极大的威胁[3-4]。小型飞行器姿态控制系统的性能受到很多因素的影响。而姿态控制系统的设计,包括传感器等,还需要考虑到小型无人机特殊的限制。所以小型飞行器控制系统的设计是一个非常具有挑战性的问题。文献[5]较全面地分析了小型飞行器特殊的限制带来的姿态控制问题,并回顾了目前小型飞行器的设计趋势。
侯营东等[6]采用基于线性扩张状态观测器(Linear Extended State Observer,LESO)的自抗扰控制方法能准确估计并补偿不确定性干扰,实现无人机对控制指令的精确跟踪。而Thompson等[7]将加速度反馈引入到小型飞行器姿态控制中以改善控制性能,将角加速度与角速度用互补滤波器结合在一起,构成更为有效的、带宽更高的速率传感器。Ren等[8]利用主翼两侧安装的气压传感器估计滚转扰动力矩,并将其引入前馈控制,从而提高了飞行稳定性。田磊设计了一种基于比例积分微分(Proportional Integral Derivative,PID)和LESO的控制方法,选取无人机的某个状态变量作为控制量,通过简化模型对状态变量进行解耦控制,进而在控制系统中加入LESO,提高了模型的抗干扰能力[9]。
我们发现,相比于现有的小型飞行器,鸟类可以完成十分稳定并具有高机动能力的飞行。例如一只普通的家燕就能够完成滚转速率很大(超过5000(°)/s)的飞行[10]。研究表明:鸟类之所以具有这些杰出的飞行性能,是因为它们能够感知自己周围的气流环境[11]。
受自然界中的现象启发,设计了一种小型飞行器姿态控制系统。在以往的研究中,已经有学者利用压力或剪切力传感器来测量攻角和使前沿气流分离并进行应用[12-14]。气流信息也可应用在大型飞行器的健康监控系统中[15]。在文献[16]中,视觉系统利用了毛发传感器来测量微型飞行器的速度信息。研究人员已经通过仿真[17]和风洞实验[18]证明了只利用压力信息就可以使单俯仰控制在稳定风和扰动风的环境下都获得令人满意的表现。
传统的控制方法将导弹非线性动力学模型进行线性化,由动力学系数建立弹体的传递函数,从而求出其控制参数[19]。但是在实际情况中,小型飞行器的低雷诺数给气动特性带来了很大影响。首先,小型飞行器的升力系数和俯仰力矩系数随攻角的变化曲线在大攻角时会呈现出明显的非线性特性;其次,在一般飞行器控制设计中可以忽略的物理量,如一些偏导数等,在小型飞行器控制设计中由于其量级增大,已经不能再被忽略[20];除此之外,控制设计使用的动力学系数都是通过大量的流体力学分析或风洞实验或飞行试验获得的,这些系数可能不够精确,而且当扰动或气流分离出现时会与真实情况有很大的出入。这些都导致了小型飞行器线性化后的模型与实际模型存在较大偏差,从而影响控制器的设计。而且,现有的飞行器控制系统大都只依赖惯性测量单元测量到的刚体信息作为反馈信息,不能及时感知和响应外界流场环境的变化。本文提出的控制方法由压力和剪切力传感器获得实时流场信息,利用这些信息计算出小型飞行器的气动力矩,利用力矩信息和姿态信息算出部分控制参数,然后使用非线性模型预测控制将力矩的变化信息引入回路进行姿态控制。理论上来讲,这种方法能够更好地解决扰动和气流分离等问题,及时感知外界流场环境变化并做出响应。并且由于气动力矩主要是由压力和剪切力数据直接积分计算得到,而不是通过线性化后的力矩系数来求取的,所以该方法的动力学偏差与其他方法相比也要小得多。
图 1所示为两种小型飞行器的控制系统,实线展现的是传统的飞行器控制系统。姿态控制系统的反馈信号是由传统传感器测量得到的,如惯性测量单元和视觉传感器等。加上虚线后是本文中研究的控制结构,力矩和刚体信息同时反馈给控制器,以提高指令跟踪性能。
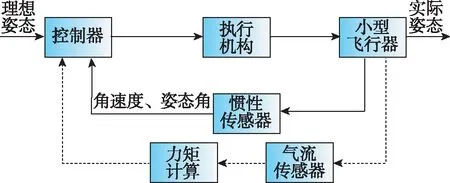
图1 传统的姿态控制方法和利用流场感知的控制方法Fig.1 Traditional attitude control method and control method using flow field perception
由文献[21],可以得到利用压力和剪切力计算小型飞行器空气动力和力矩的方法。通过分散在机翼表面和舵面的微型传感器,可以测量到机翼表面和舵面的压力和剪切力。理论上,传感器越多,最后得到的结果越精确。但是受质量和体积等限制,只能选择有限数目的传感器,一般选择分布在小型飞行器的平均气动弦长上的。已知这些点附近的压力和剪切力分布以及位置矢量,通过积分求和即得作用在小型飞行器上总的气动力和力矩。

图2 小型飞行器Fig.2 Small UAV
本文针对图 2所示小型飞行器易受风扰动影响的问题,提出了一种基于流场感知的飞行姿态控制方案。利用小型飞行器表面贴装的气压传感器实时测量飞行器周围的流场信息,积分得到飞行器所受的气动力和力矩,然后利用非线性模型预测控制设计控制器,该控制器结构取得了良好的仿真效果。
1 模型建立
如果机翼表面单元的位置矢量为rWS,那么由压力和剪切力在这个单元上产生的力和力矩可以如下计算
(1)

由式(1)积分可得,作用在整个机翼表面上的力fWS和力矩mWS为
(2)
其中,舵面上力fRS和力矩mRS的计算与机翼类似。
最后,将机翼和舵面上的力和力矩转换到机体坐标系上即可求得合力与合力矩。
如图 3所示,在小型飞行器表面贴装气压传感器,由计算流体动力学(Computational Fluid Dynamics,CFD)结果表明,240个即可准确地获得流场信息。

图3 全机240个气压传感器分布位置图Fig.3 240 pressure sensors on the UAV
在机体系的无人机姿态动力学方程为
(3)
(4)
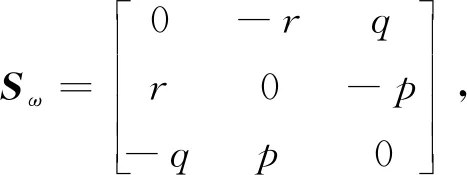
其中,p、q、r分别为弹体坐标系转动角速度沿弹体坐标系各轴的分量;φ、θ、ψ分别为滚转角、俯仰角和偏航角;L、M、N分别为沿各弹体轴的气动力矩;I是相对重心的转动惯量矩阵。令x1=p,x2=q,x3=r,y1=φ,y2=θ,y3=ψ,则x=[p,q,r]T,y=[φ,θ,ψ]T。MB=[L,M,N]T是风速、姿态和舵偏的非线性函数,如果用这个模型,很难设计出一个控制器。因此,用泰勒展开把力矩在控制变量u0附近展开
(5)
O(Δu2)
(6)


(7)
因此,用在控制器设计的标称模型为
(8)
2 控制回路设计
与传统的非线性模型控制算法[22-24]不同,本文考虑了跟踪问题,设计了一个预测控制器使输出y能够最优跟踪参考信号yD。
为了简化符号,同时尽量使原理更容易理解,在这里先以单输入单输出的非线性系统进行说明。
一个典型的非线性单输入单输出系统可以描述为

(9)
在这里x、u、y分别是状态变量、输入和输出变量。
为了简化,接下来引入如下变量
(10)
(11)
(12)
根据文献[25],最后得到的控制方法如下
(13)
其中,控制增益K的计算参考文献[25],且
(14)
从控制律就可以看出,这是一个非线性状态变量反馈控制律。利用控制律计算控制量的导数,用到了状态变量、当前的控制量和参考信号,并通过对时间积分获得下一时刻的控制量。
类似地,将该控制方法应用到多输入多输出的小型飞行器姿态动力学模型上
(15)
(16)

因此,用在控制器设计的标称模型为
(17)
那么
(18)
又有
(19)
(20)
代入式(13)可得
(21)
其中

最后可得控制量为
(22)
仿真模块图如图4所示。
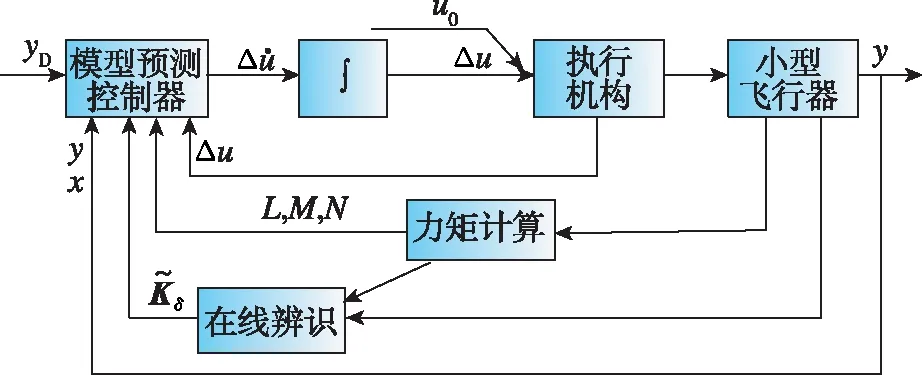
图4 仿真模块图Fig.4 Simulation diagram
3 仿真验证
设初始角度均为0°,小型飞行器的速度为20m/s,推力为20N。Kmδe在初始时假设为一个小值1。
图5所示为俯仰力矩系数随攻角的变化曲线,可以看出实际俯仰力矩系数与实验俯仰力矩系数有很大区别。按照实验得到的数据设计的PID控制器在实际情况中会失效,不能实现姿态控制。而本文方法在这种情况下依然能完成较好的姿态控制。
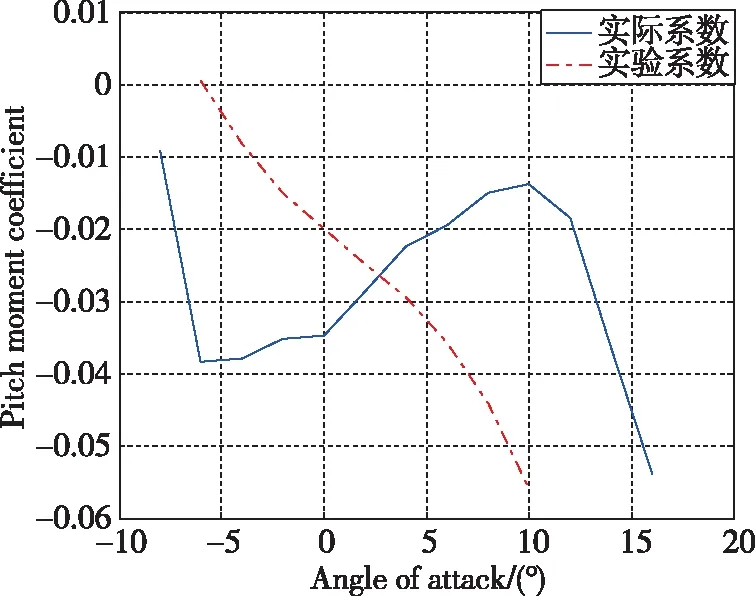
图5 实验俯仰力矩系数与实际俯仰力矩系数对比Fig.5 Comparison between experimental pitch moment coefficient and actual pitch moment coefficient
1)假设力矩测量完全无噪声和偏差时
以俯仰通道为例,直接令u0=(0,0)。
图6和图7中,数据1是没有任何扰动的结果,数据2是加入了水平扰动风的结果,数据3是开始无扰动而5s以后加入了速度为5m/s的垂直风的结果。其中水平扰动风为平均速度为10m/s,方差为4m/s的高斯分布。
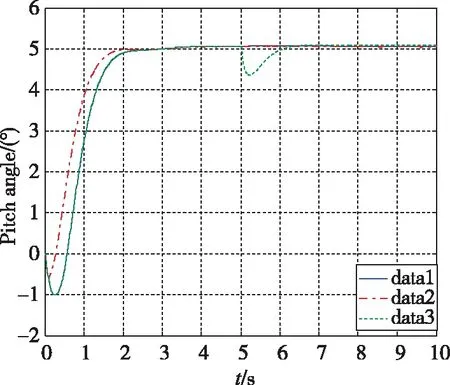
图6 在不同扰动情况下俯仰角从0°变化至5°Fig.6 Pitch angle changes from 0° to 5° under different disturbances
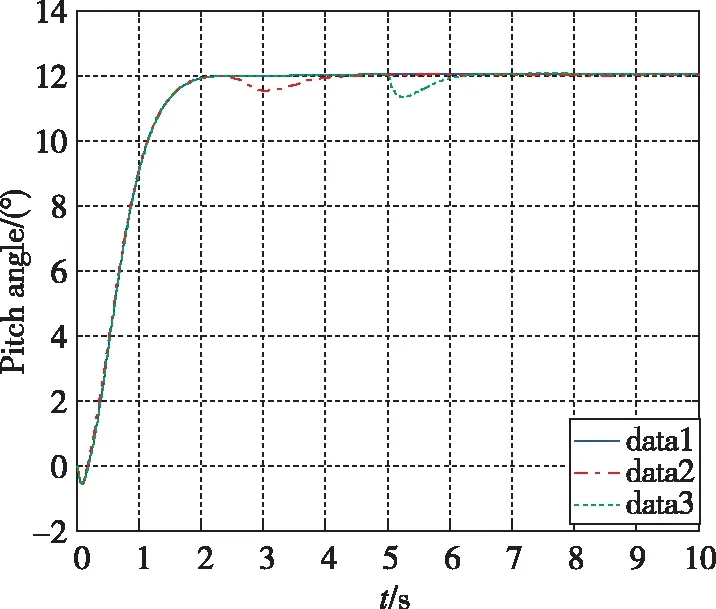
图7 在不同扰动情况下俯仰角从0°变化至12°Fig.7 Pitch angle changes from 0° to 12° under different disturbances
可以看出,在阵风干扰的情况下,基于气流信息的非线性模型预测控制也能够维持小型飞行器的姿态稳定,实现较好的姿态控制。
2) 力矩测量存在高斯噪声时
图8中,数据1存在平均值为0,方差为0.03的高斯噪声是俯仰角从0°变化到5°的曲线,数据2存在平均值为0,方差为0.03的高斯噪声是俯仰角从0°变化到12°的曲线。可以看出,控制器仍然能较好地控制姿态。但是由于加入了滤波环节,导致了参数滞后,在开始时俯仰角偏差较大(比较图 6和图 7)。

图8 力矩测量存在噪声时俯仰角的变化情况Fig.8 Changes of pitch angle in the presence of moment measurement noise
4 结论
和现有的小型飞行器控制系统不同,本文提出了一种基于流场感知的新型控制方法来控制小型飞行器的三轴姿态。在这种控制方法中,利用了分布在小型飞行器表面的气流传感器来获得飞行器表面压力和剪切力的信息,并利用这些信息计算出气动力矩。再利用力矩信息来辨识控制参数,并将力矩的变化信息应用到非线性模型预测控制中,从而获得了控制增量,得到了一种新型控制方法。这种控制方法和传统的控制方法不同,不需要事先已知大量的气动数据,而是依靠微型传感器上测量的气流信息计算出力矩来实现控制。仿真结果表明:本文提出的控制方法能够使小型飞行器在阵风干扰较大的环境下实现良好的姿态控制。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
上海师范大学学报·自然科学版(2022年3期)2022-07-11
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年7期)2021-08-13
无线互联科技(2017年17期)2017-09-18
软件导刊(2017年1期)2017-03-06
肉类研究(2016年4期)2016-05-17
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年1期)2015-04-13
湖南师范大学学报·自然科学版(2014年5期)2014-11-14
