基于Smith预估型模糊PID温度控制系统的设计*
2020-11-16 04:33戴世纪王仲根
重庆工商大学学报(自然科学版) 2020年6期
戴世纪, 王仲根
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引 言
PID算法是工业应用最广泛的算法之一,其中P是比例系数,I是积分系数、D是微分系数,同时通过反馈回路形成闭环控制系统,最能体现反馈思想的控制系统,具有结构简单、易于实现等优点,但在复杂工况的工业场景中难以取得预期的理想结果。为了在工业中广泛应用,许多科技人员开展大量研究。文献[1]设计一种常用的Fuzzy-PID算法控制系统温度,对PID整定值进行在线调整,使其具有较好的适应能力。文献[2]建立了模糊神经网络PID算法的结构模型,在模糊PID算法中引入神经网络模型,解决了系统纯滞后的问题,具有较强的鲁棒性。文献[3]通过粒子群算法得到PID系数,利用闭环负反馈的PID结构实现对系统的温度在线调整。文献[4]提出了一种综合滤波算法用来消除噪声对温度信号的干扰,对电压信号进行滤波消噪处理,利用综合滤波算法为基础并辅以模糊自适应PID控制温度,此方法可消除多数噪声。文献[5]方法通过蚁群算法获取一组最佳的PID系数Kp、Ki、Kd,具有良好寻优的特性,在规定范围内进行高效启发式搜索找到最优解。但上述控制系统操作复杂,成本较高,参数控制困难,难以在保证系统性能的前提下,提高操作可行性。
为提高温控系统性能,解决温控系统中产生超调量较大的扰动,响应时间较长等问题[7]。设计一种基于Fuzzy-Smith滞后补偿型PID温控系统,系统在一般PID算法上改进,将模糊推理环节加入PID控制中,并通过Smith算法减少系统的波动幅度,改善温控的稳态品质,降低响应时间,提高控制过程的鲁棒性[8]。
1 温度控制系统结构
1.1 室内温度控制模型
由于室内温度控制系统设计较为复杂,其延迟时间、增益系数和时间常数反映了温度控制的动态特性[9]。因此,室内温度模型的传递函数可表示为
(1)
式(1)中,K为增益参数,τ为时滞时间,T为时间常数。考虑实际情况,实验温度控制初值为18 ℃,根据Cohen-Coon整定法可得出K=1,T=10,τ=5,因此,函数的传递函数为
(2)
1.2 模糊控制规则
模糊控制通过事先设定的规则表使控制器由自我学习和组织的功能,以特定的语言变量建立映射关系,完成模糊推理,并将结果输出到控制器,规则表体现了系统的偏差值、偏差变化量与系统输出之间的映射[10]。控制流程如图1所示。
一般情况下,温度模糊控制系统选择预定温度和实际温度的偏差e及偏差变化率ec作为模糊控制器的输入,系统的决策部分选用的是Mamdani算法。规则库是由若干条控制规则组成,按照IF…is…and…is…THEN…is…的形式表达。根据实践经验,具体的系统规则如表1所示。
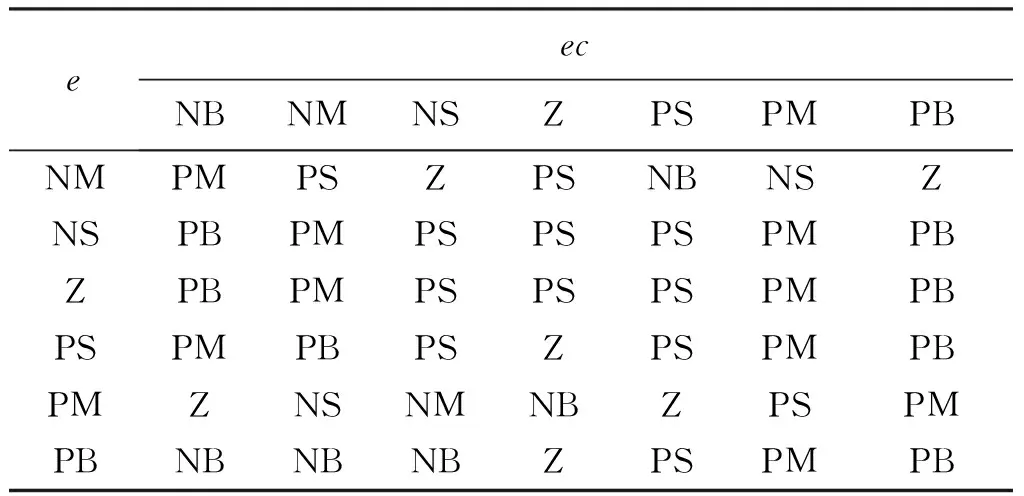
表1 Kd模糊控制规则表Table 1 Kd fuzzy control rule table
2 模糊PID及Smith预估器
2.1 模糊PID
模糊控制是基于模糊逻辑的描述一个过程的控制算法,缺点是难以消除稳态误差,稳态精度较低[11]。因此,在传统PID算法中引入模糊推理算法,加快响应速度,提高系统的稳定性,是一种常见的控制方法。具体传统PID控制流程如图2所示。
系统是两输入三输出的模糊控制结构,得到模糊推理的输出量是调整值ΔKp、ΔKi、ΔKd,通过将推理输出值代入以下公式,得出最佳PID调整值。如式(3)所示:
(3)
式(3)中,Kp为实际PID控制的参数,Kp0为PID的参数整定值,Gp为比例因子。计算机控制中常用的PID控制的表达式如式(4)所示:
(4)
式(4)中,Kp为比例参数,Ki为积分参数,Kd为微分参数。Kp能够提高系统的响应速度[12]。Ki可以消除系统的稳态误差。Kd用来增强系统的动态特性,对系统偏差进行预报。
2.2 Smith预估器控制
Smith算法是一种对滞后环节预判的时延补偿算法。其主要思想是被控对象包含着纯滞后环节,使系统调节能力下降,一般PID算法不能取得良好的效果。在此情况下,加入含有滞后部分G(s)(1-e-τs)的Smith补偿型算法,以降低被控系统的震荡幅度,克服了一般PID算法的缺陷,加快响应速度。其控制流程如图3所示。
由图3的流程图可知,含有滞后补偿的反馈回路与Smith算法结合的闭环函数表达式如式(5)所示:
(5)
式(5)中Gc(s)为系统函数表达式,Gp(s)e-τs含有纯滞后被控系统的函数式。在式中系统存在着延时特性e-τs,为了克服系统的延时特性,在控制系统的回路中加入补偿环节Gp(s)e-τs,使系统过程提前了τ时刻,消除了系统的纯滞后环节e-τs部分,即经过了预估补偿。因此,通过与时延补偿环节结合后,闭环回路的函数表达式转化为式(6)所示:
(6)
将模糊控制引入Smith预估控制中,并在反馈回路上加入Smith预估器用于提前预测调整系统的超调量,构成Smith-Fuzzy控制系统。其流程如图4所示。
3 系统仿真及结果分析
3.1 仿真过程
基于Matlab建立温控仿真系统,设置目标温度为20 ℃,系统时间为200 s。其中,模糊控制的输入系数Ke=0.01,Kec=4,模糊控制的输出系数分别为Gp=0.01,Gi=0.001 5,Gd=0.003 5,PID控制器的整定初始参数为Kp0=0.82,Ki0=0.13,Kd0=1。其中常规PID控制仿真如图5所示。
为了比较Fuzzy-Smith算法优化后的效果,将其与Fuzzy-PID算法、一般PID算法和Smith型PID控制进行比较,4种控制方案如图6所示。
3.2 结果分析
实验结果如图7所示,一般PID算法温度最大值为25.7 ℃,震荡幅度为28.5%,响应时间约115 s后达到稳定;Fuzzy-PID算法的最高温度为23.6 ℃,震荡幅度为18%,响应时间约105 s后温度达到稳定;Smith算法的温度没有明显的振荡产生,响应时间约为70 s后温度达到稳定;Fuzzy-Smith控制温度的最高温度20.8 ℃,振荡幅度仅为4%左右,调节时间约为60 s后温度达到稳定值。
通过对结果分析可知,传统的PID算法和模糊PID算法的上升速度较快,但超调量较大,系统稳态误差较大,适应力较弱,调节能力较差;Smith算法的超调量相比其他算法小,能够使系统保持较好的鲁棒性,但曲线上升时间和系统调节时间较慢。Fuzzy-Smith算法的温度上升较快,振荡幅度相比其他控制方法较小,几乎可以不记,而调节到稳定温度值所花时间较少,可以明显改善温控系统的性能,增强调节能力和抗干扰能力,曲线上升时间快,时间延时短、具有比较理想的稳态品质。具体参数性能由表2可以看出。
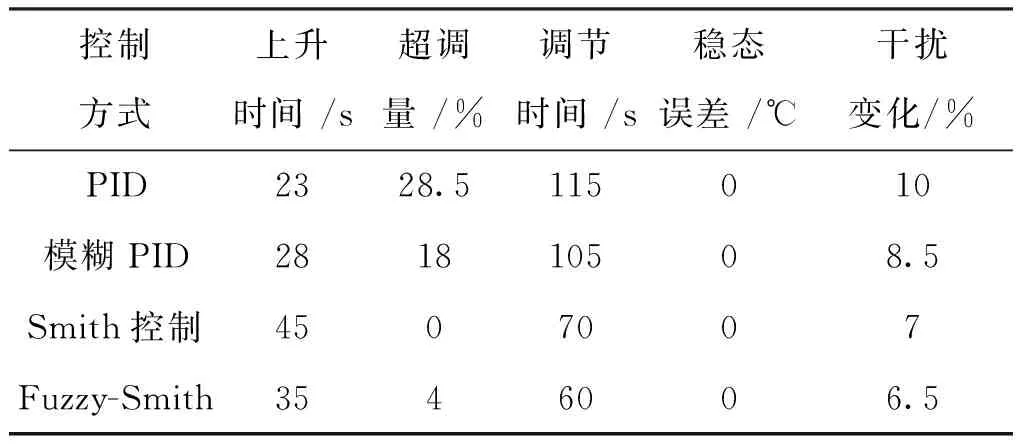
表2 4种算法调节结果Table 2 Four algorithms adjustment results
3.3 系统抗干扰能力分析
为了比较系统在不同情况下的抗干扰能力,在T=85~90 s处预先在PID控制系统中加入一个幅值为4的阶跃干扰信号,仿真结果如图8所示。图8可以看出:4种控制系统受到干扰后都产生了1次明显振荡,其中模糊PID控制系统受干扰后产生较大的曲线波动,受到干扰影响较强,最大波峰变化量为8.5%,而模糊Smith-PID控制受到阶跃干扰信号较小,最大波峰变化量仅为6.5%,保持了较好的稳定性和控制精度,具有良好的抗干扰性能。
4 结 论
建立了室内温控系统的数学模型,针对室内温度控制系统具有调节弱、纯滞后和非线性的特点,提出一种基于Fuzzy-Smith补偿型的PID控制算法。实验结果表明,Fuzzy-Smith型算法充分发挥了Smith算法的滞后补偿作用,与其他方法相比,Fuzzy-Smith控制系统能够抑制系统的超调量,加快调节响应速率,通过对控制系统时滞性进行补偿提高控制对象的稳态特性,同时还具有模糊推理方法的优势,达到预期的系统特性。
猜你喜欢
电力需求侧管理(2022年5期)2022-10-14
遗传(2022年9期)2022-10-10
汽车实用技术(2022年15期)2022-08-19
大电机技术(2022年3期)2022-08-06
河南科技(2022年8期)2022-05-31
煤气与热力(2021年4期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
中华戏曲(2020年1期)2020-02-12
电子制作(2019年16期)2019-09-27
汽车零部件(2015年5期)2015-01-03