抽水蓄能保护开关位置信号采用扩展接点的风险分析
2020-11-13 03:07:24赵补石贺儒飞毕智伟王方
湖南电力 2020年5期
赵补石, 贺儒飞, 毕智伟, 王方
(1. 南方电网调峰调频发电有限公司, 广东 广州510950;2. 湖南省湘电试验研究院有限公司, 湖南 长沙410004;3. 国网湖南省电力有限公司电力科学研究院, 湖南 长沙410007)
0 引言
抽水蓄能电站是促进新能源消纳, 推动新型能源战略的关键力量[1-2], 由于新能源场站的负荷存在不确定性和随机波动性, 电力负荷峰谷特性更加复杂, 抽水蓄能机组工况转换更加频繁[3-4], 机组及变压器保护的投退频率也随之增多。 抽水蓄能机组及主变压器保护系统需要判别机组运行工况[5-6], 以自动投退相应的保护[7-10], 这是抽水蓄能保护的基本技术要求。 其工况判别目前的主流方法是采集机组主回路上的各个开关刀闸的位置信号, 由位置特征来判别运行工况。 开关刀闸的位置信号一般取自开关刀闸自身的位置辅助接点, 但这些接点的数量往往是有限的, 因此需要采用重动继电器对接点进行扩展。 在某些抽水蓄能电厂, 部分保护设备就采用了扩展接点, 但是这种方式会给保护带来一定的误动风险。
1 基本情况
某抽水蓄能电站采用ABB 公司生产的GCB(Generator Circuit Breaker, 发电机出口断路器),其机构本体直接提供的分位辅助接点有12 付,由于机组的励磁、 调速器、 监控、 保护、 电气闭锁等多个二次控制保护系统都需要用到分位接点, 且往往这些系统都是双重化[11], 甚至三重化配置, 所以造成本体位置辅助接点数量不够用, 误动风险高[12-15]。 以主变保护B 套为例, 该保护需要采集GCB 的分位位置信号, 由于GCB 自带的分位辅助接点数量不够, 故采用了扩展接点。 如图1 所示, GCB 分位、 合位接点接至扩展继电器K602、 K602 的61-62 常闭接点再接入主变保护B套, 该分位信号主要用于主变差动保护的动作逻辑。
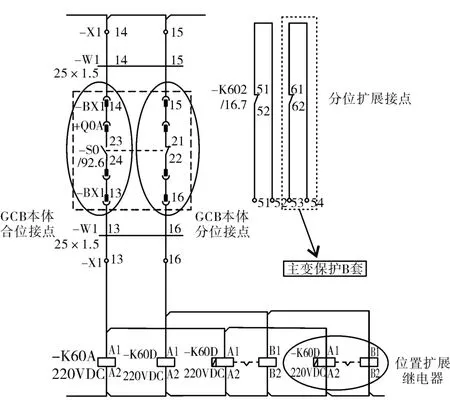
图1 主变保护B 套采用CCB 分位扩展接点示意图
1.1 GCB 位置接点动作行程
图2 为GCB 位置辅助接点动作行程图, 黑色表示闭合, 白色表示断开。 如果从GCB 主触头位置来区分, 主触头断开表明GCB 一次回路处于分位, 主触头合上表明GCB 一次回路处于合位, 所以主触头的分合代表了GCB 的实际位置。 但GCB位置辅助接点并不安装在主触头上, 而是安装在GCB 操动机构上, 其动作行程与GCB 主触头行程不完全同步, 主触头变位与位置辅助接点变位不在同一时刻, 存在一定超前或滞后, 主触头位置分界点实际处于位置辅助接点的合位和分位之间。 而保护不可能直接检测主触头位置, 只能检测位置辅助接点的信号, 也就是说, 在GCB 分合过程中, 保护测得的GCB 位置, 必然会出现一段时间的过渡过程, 既不在合位也不在分位。

图2 GCB 位置辅助接点动作行程图
1.2 主变差动保护动作逻辑
抽水蓄能机组的主变压器保护通常安装有大差和小差两种差动保护, 其中大差保护的保护范围包括GCB。 当机组未并网时, 即抽水蓄能机组换相刀分闸位置=1 或GCB 分闸位置=1, 机端电流不流经主变(如变频启动和电气制动过程), 机端电流不计入大差保护的差流计算。 保护装置对开关刀闸位置等开入信号的变位, 通常设置有10 ms的防抖延时, 即信号翻转之后, 需经过10 ms 才能够正式确认信号的状态。 另外, 主变差动保护差流值达到动作值后, 一般要经过20 ~30 ms 的运算处理, 保护才会动作出口。 而当机组已经并网, 机端电流会流过主变, 如果主变大差保护还没有计入机端电流, 由于机端电流缺失造成的差流有可能达到动作门槛(取决于机端电流的大小), 则保护会在20 ms后动作。 可见, GCB 位置信号的变位延时与保护的动作逻辑密切相关, GCB 位置信号与机端电流的变化应保持同步, 两者的时间差越小越好。
2 采用GCB 本体位置辅助接点的动作行为分析
2.1 开关由分到合过程分析
如图3 所示, t1为分位接点由闭合到断开的时刻, t2为主触头由断开到合上的时刻, t3为合位接点由断开到闭合的时刻。 在GCB 合闸操作过程中,t1时分位接点首先断开, 经10 ms 防抖延时, 即t1+10 ms时, 保护经防抖延时确认GCB 分闸位置=0, 机端电流开始计入差流。 t2时主触头闭合, 机端开始流过并网冲击电流, 如果t1+10 ms>t2, 则从t2至t1+10 ms 这端时间内, 机端电流尚未计入差流, 但实际已有电流故差流可能超过动作门槛。但差动保护至少需要20 ms 才能动作。 因t2>t1, 故t1+10 ms-t2<20 ms, 差流不足以维持20 ms, 如图4所示。 主变差动保护即使已经启动, 仍然会在20 ms内复归, 差动保护不会误动。

图3 GCB 本体位置接点动作行程与电流 变化时序图
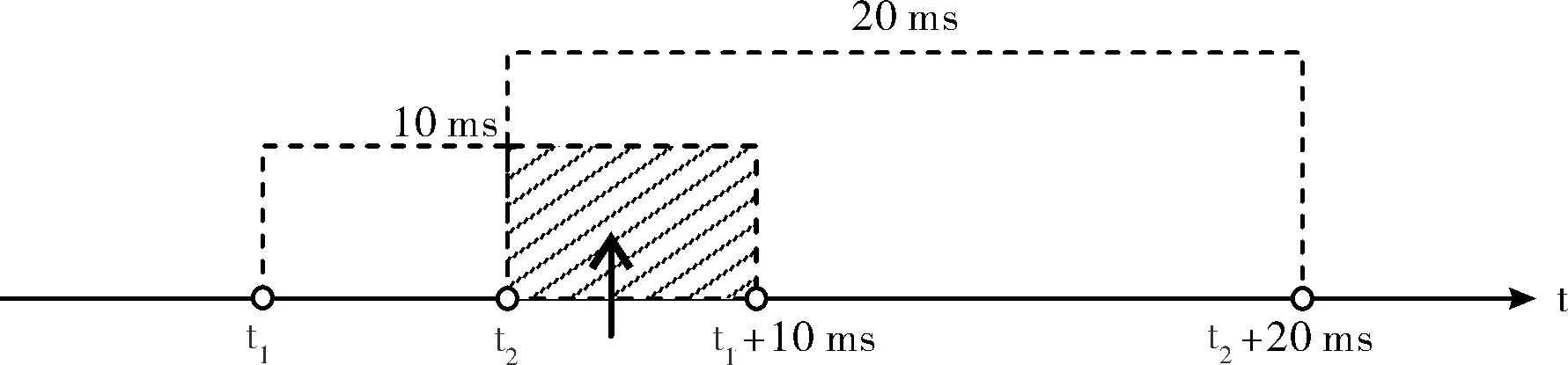
图4 采用本体接点差动保护动作时序图
2.2 开关由合到分过程分析
GCB 分闸操作过程中, 由于分位接点闭合晚于GCB 主触头分断, 即晚于机端电流切除, 当机端电流不计入差流时, 机端确已无电流, 因此差动保护不会误动。
综上, 采用GCB 本体位置辅助接点时, 无论GCB 由分到合, 还是由合到分, 差动保护均不会误动。
3 采用GCB 位置扩展接点动作行为分析
3.1 开关由分到合过程分析
如图5—6 所示, t1、 t2、 t3代表的意义同图3,t4为扩展分位接点由闭合到断开的时刻。 GCB合闸操作过程中, t1时GCB 本体分位接点首先断开, t2时主触头闭合, 机端流过并网冲击电流, 开始产生差流。 由于采用了双稳态继电器的常闭接点作为分位扩展接点, 至t3时GCB 本体合位接点闭合, 双稳态继电器K602 励磁才能状态翻转, 再经一定的继电器动作时间(一般为10~20 ms), 直至t4时继电器内的扩展分位接点才断开, 再经10 ms防抖延时, 保护才判断GCB 分闸位置=0, 将机端电流计入差流后差流消失。 从t2开始有差流直到t4+10 ms 差流消失, 经过了较长的时间, 完全有可能超过差动保护的动作时间20 ms, 即(t4+10 ms)-t2>20 ms, 这样就有可能造成差动保护误动作。
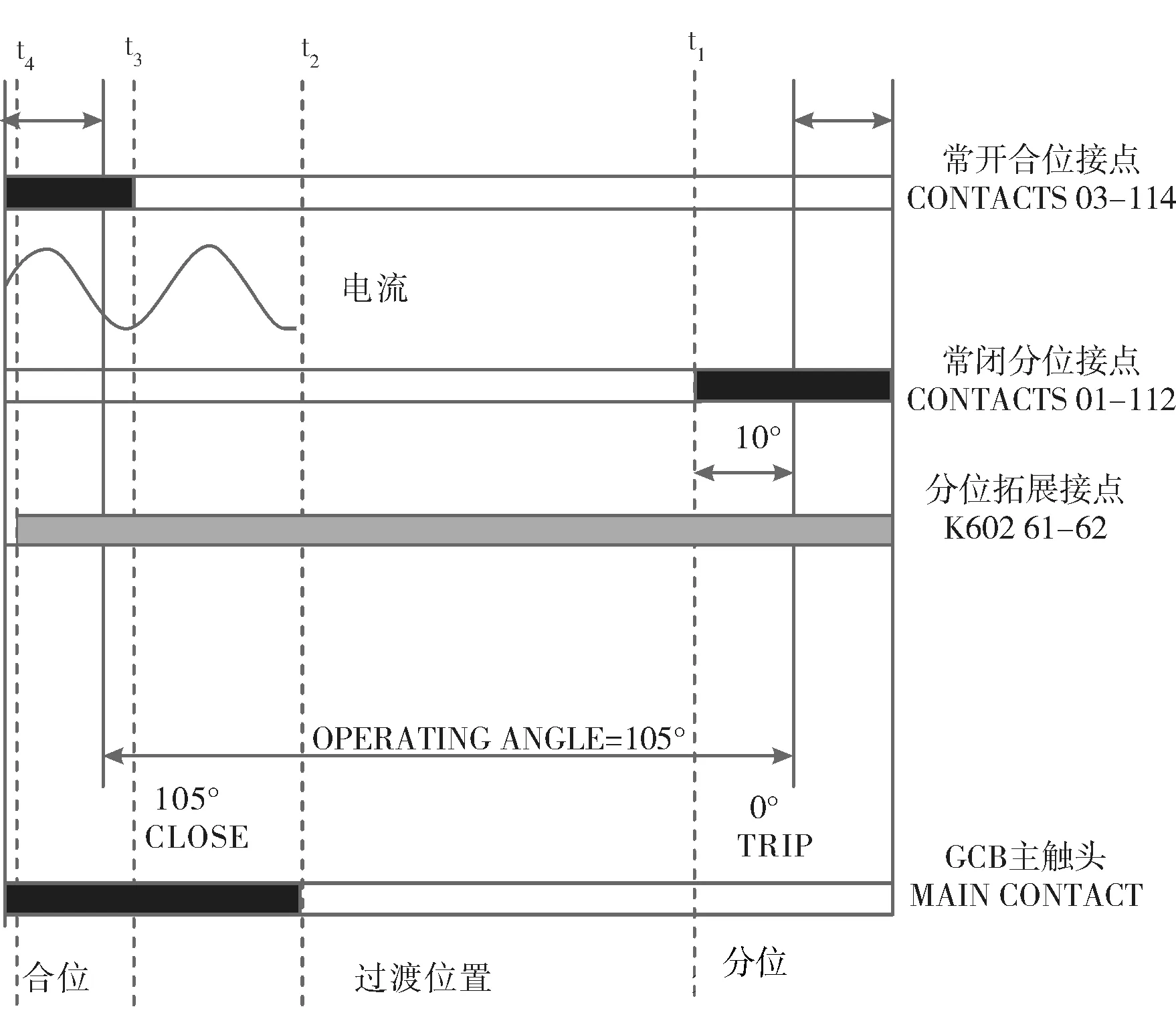
图5 GCB 扩展分位接点动作行程与电流 变化时序图
图6 采用扩展接点差动保护动作时序图
3.2 开关由合到分过程分析
开关分闸过程中, 由于扩展分位接点需要在本体分位接点闭合使位置继电器状态翻转之后才能闭合, 那么一定会晚于机端电流切除, 且晚于本体分位接点闭合, 机端电流将一直计入差流计算直至确认扩展分位接点已变位, 保护不会误动, 也不存在拒动风险。
综上, 采用GCB 扩展位置接点时, GCB 由分到合, 差动保护有较大误动风险, 由合到分, 差动保护不会误动。
4 避免保护误动的应对措施
通过对GCB 开关位置原生接点和扩展接点动作行为分析可知, 抽水蓄能保护的开关位置信号如果采用扩展接点, 受动作行程和动作时序的影响,会导致较高的误动风险。 在本例中, 机组并网过程中在GCB 开关由分至合过程中, 由于扩展分位接点断开较慢, 大大滞后于机端电流出现, 差动保护容易误动, 而采用本体辅助接点则无此隐患。 为消除采用扩展接点带来的误动风险, 确保在开关切换过程中保护不发生误动, 电站对各台机组的开关接点回路进行全面筛查和整改, 一些原本采用了本体接点但对时滞要求不高的回路改为采用扩展接点,留出本体接点给保护回路用, 而保护回路原采用了扩展接点的全部改为本体接点, 消除误动隐患, 提高保护动作可靠性。
5 结语
抽水蓄能保护判别运行工况需要判断开关位置, 实际工程应用中, 有采用开关本体位置辅助接点信号及扩展位置接点信号这两种做法。 开关位置信号变位与开关实际位置变化相比存在一定时差,当采用扩展接点时, 时滞大幅增加, 保护不能及时判别出工况的变化, 无法执行正确的动作逻辑, 从而使保护存在误动或拒动风险, 为避免保护不正确动作, 建议: ①开关刀闸设备选型时原生接点的数量预留应充足, 以满足控制保护设备的需要。 ②尽量采用开关刀闸位置的本体接点, 避免采用扩展接点。 原来已经采用了扩展接点的, 如具备条件应进行技改更换为本体接点, 或采取其他有效防误措施, 例如延长保护动作时间或抬高动作门槛, 但有可能会造成保护性能降低。 ③抽水蓄能保护设计时要注意保护的动作逻辑和工况判别条件, 充分考虑开关刀闸位置转换过程中的状态变化对保护动作行为的影响。
猜你喜欢
统计与决策(2024年3期)2024-03-02 06:28:48
股市动态分析(2023年15期)2023-08-09 19:11:07
水电与抽水蓄能(2022年1期)2022-03-13 09:42:36
通信电源技术(2022年23期)2022-02-20 09:06:54
电子乐园·中旬刊(2021年2期)2021-10-07 09:18:50
西部论丛(2017年10期)2017-02-23 06:31:36
中国新技术新产品(2016年24期)2017-02-05 17:50:41
企业技术开发·中旬刊(2015年8期)2015-05-30 02:02:24
机电信息(2015年6期)2015-02-27 15:55:06
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12