基于无人机的10 kV 架空配电线路漂浮异物清除装置设计
2020-11-13 03:07:28雷冬云白剑锋温智慧黄永超贺韧
湖南电力 2020年5期
雷冬云, 白剑锋, 温智慧, 黄永超, 贺韧
(1. 国网湖南省电力有限公司长沙供电分公司, 湖南 长沙410076;2. 国网湖南省电力有限公司技术技能培训中心, 湖南 长沙410131;3. 长沙电力职业技术学院, 湖南 长沙410131)
0 引言
随着国民经济的快速发展, 对供电可靠性的要求不断提高[1-3], 然而线路走廊的塑料薄膜、 风筝等漂浮物易在风力的作用下悬挂于带电导线上, 严重威胁线路的安全运行[4]。 输配电线路上的漂浮物会引发线路跳闸, 严重时将会造成停电甚至是导线熔断等事故[5]。 据分析, 线路因漂浮物而发生的跳闸故障占比可达7. 2%[6], 为了有效地消除线路的安全隐患, 导线上的漂浮物清除工作已经成为线路运维的主要任务之一。
目前对于架空配电导线上漂浮物的处理方法按照作业方式可以分为停电处理、 带电作业人员采用绝缘杆法处理、 采用绝缘斗臂车处理等方式[7-8]。文献[9] 提出了激光炮清除线路异物方法, 该方法常用于110 kV 及以上架空输电线路, 对于架空配电线路多为绝缘导线且相距距离仅600 ~700 mm, 激光炮易造成表层损伤。
随着无人机技术发展, 利用无人机处理导线上的漂浮异物渐渐被重视, 无人机能够克服停电作业给用户带来的不便和带电作业的危险性高、 劳动强度大、 耗时较长、 环境受限性大等缺点, 具有安全、 方便、 高效等优点[10-12]。
鉴于此, 本文设计了一种无人机清除线路漂浮异物装置, 采用不同组件, 实现漂浮物的切断分离、 抓取回收等操作, 在方便实用、 降低劳动强度、 提高工作效率的基础上, 有效地清除线路漂浮异物, 为配电线路的安全运行提供保障。
1 方案分析
1.1 方案选择
采用无人机处理漂浮物的方式主要有喷火清障型[13]、 激光清障型[9,14]、 发热丝清障型[15], 由于喷火、 激光等高温、 高能方式虽然能够将线路上的飘挂异物烧毁, 但一定程度上也对电网的正常运行构成威胁[5]。 表1 为喷火式作业和机械手臂式作业方式的对比分析, 从环境适应性和对导线的损伤程度考虑, 采用的是机械手臂作业方式, 在于其环境适应性好, 并且不易对导线造成损伤, 唯一的缺点是对于缠绕过紧的漂浮物处理相对困难。
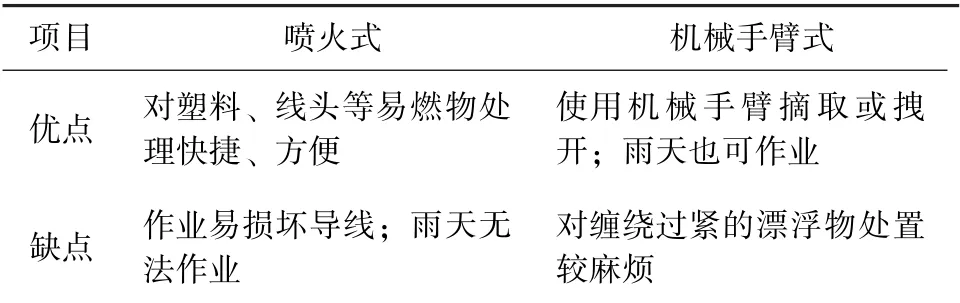
表1 作业方式对比分析
机械手臂的材质对无人机的要求和制造难易度影响很大, 对比分析钢质、 绝缘材质的机械手臂情况见表2。 从无人机载重的角度考虑选择绝缘机械手臂操作杆, 在于其质量轻、 安全性好, 适用于多种类型无人机, 但是生产的难度较高。
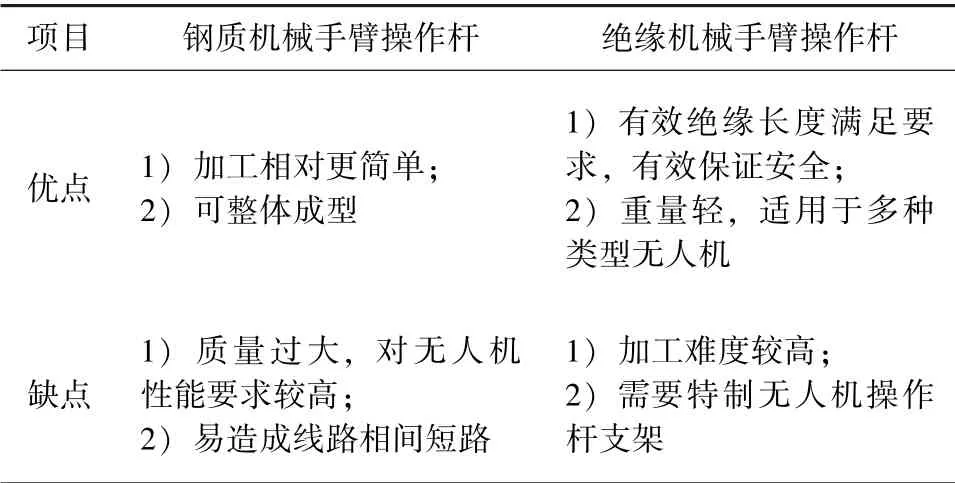
表2 机械手臂的材质分析
1.2 功能要求
配电线路的漂浮物主要有塑料薄膜、 风筝、 绳线等, 典型配电线路漂浮物如图1 所示, 受风力的影响, 漂浮物在导线上的缠绕松紧程度不同, 因此需要采用不同的方式进行清除。 对于导线上简单缠绕的漂浮物, 如图1 (a) 所示, 可以直接采用无人机手臂抓取或钩拉的方式。 如果漂浮物在导线上缠绕过紧, 如图1 (b) 所示, 难以直接抓取的可采用先切割, 后抓取的方式。
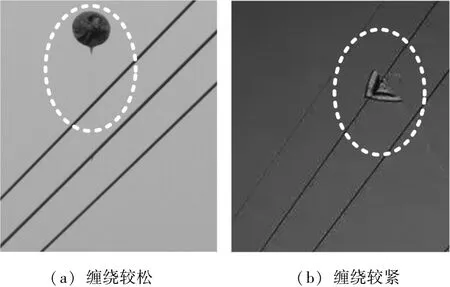
图1 典型的配电线路漂浮物
基于上述功能要求, 本装置以绝缘操作杆为基础, 配套设计切割组件、 螺丝钩组件、 抓手组件三种操作头, 特点见表3。 通过替换安装在无人机平台上的操作头, 实现利用切割组件中的刀片切断、切碎异物, 利用螺丝钩拉出高空异物, 利用垃圾抓手组件抓取高空线路异物。

表3 操作头的特点分析
2 方案设计
装置整体设计如图2 所示, 主要包含无人机、连接杆、 绝缘杆、 控制箱和切割组件、 螺丝钩组件、 抓手组件三种操作头。 无人机采用大疆经纬M610 型无人机, 其载重能力大于8 kg、 续航能力30 min, 通过备用电池可增大巡航能力, 可满足正常的带电作业要求。
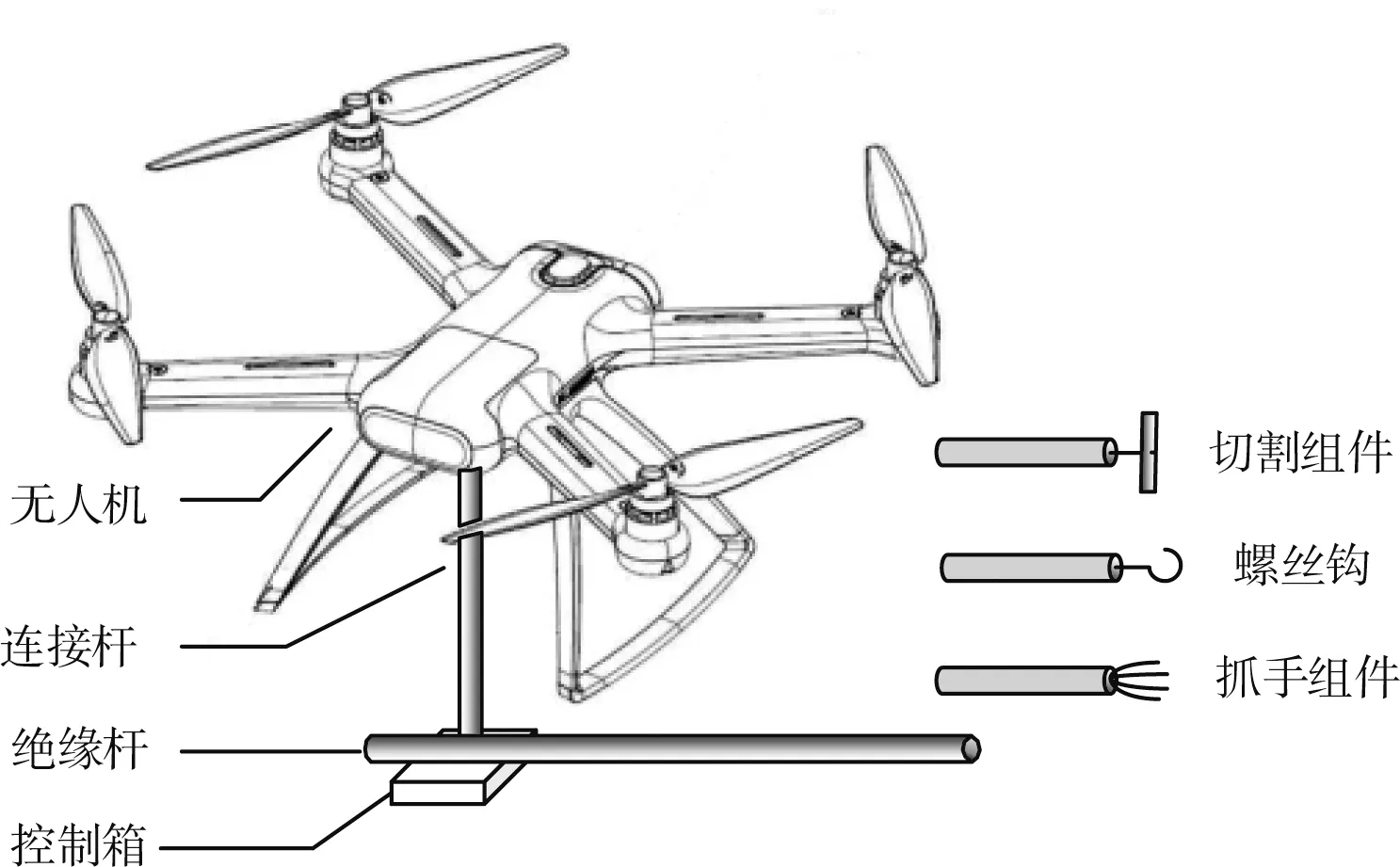
图2 装置结构
绝缘操作杆包括固定在无人机底部横杆上的外绝缘管、 固定于外绝缘管后端的减速电机、 套装于外绝缘管内可转动的内绝缘管、 连接于内绝缘管上的转接头。 外绝缘管两端与内绝缘管之间均设有自润滑轴承, 密封管件上连接有可拆卸的蓄电池, 如图3 所示。
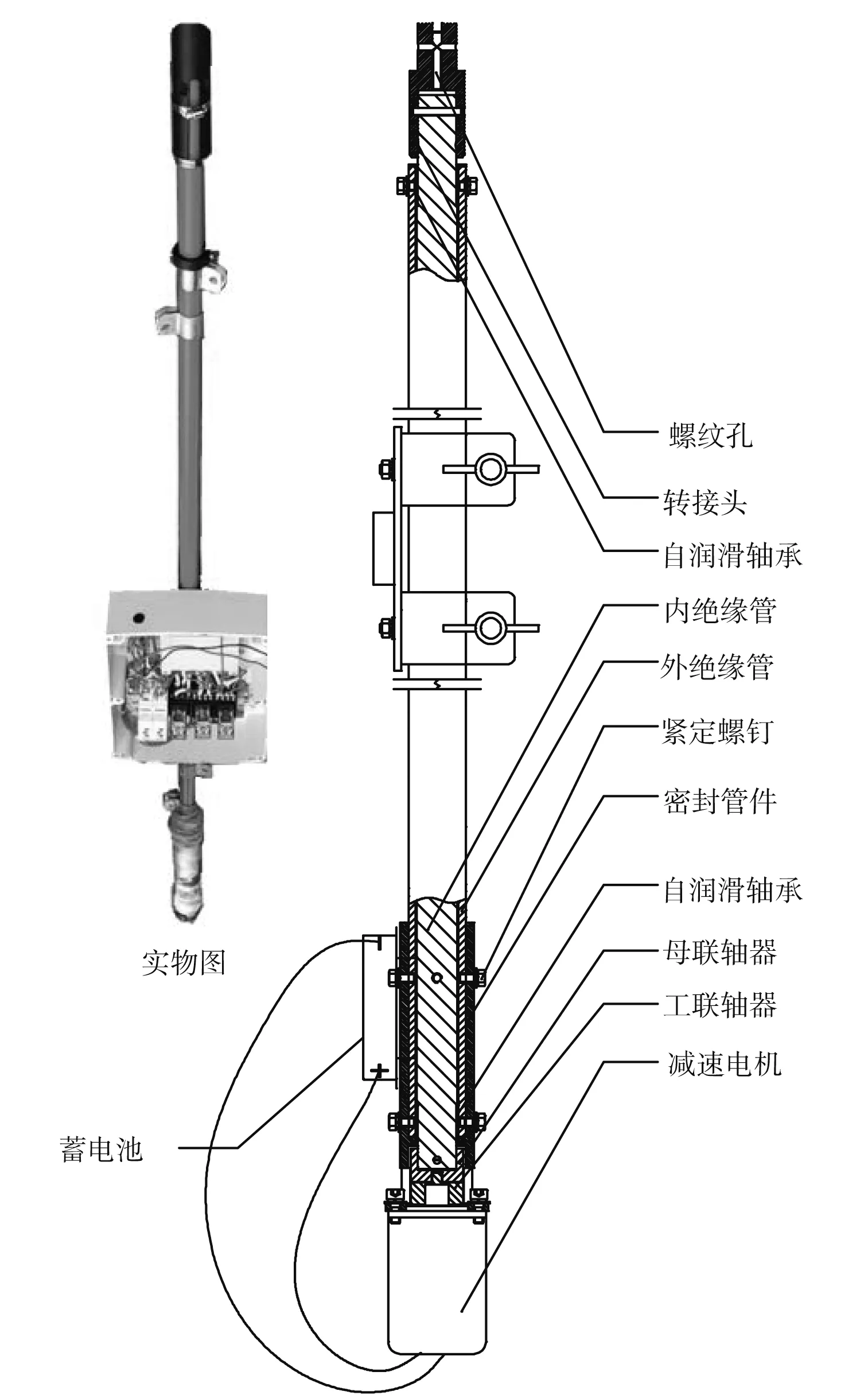
图3 绝缘操作杆
内、 外绝缘管由环氧树脂加玻璃纤维料制成。减速电机采用GMP42-775PM-2460-19 型直流减速电机, 其直流电压DC24V、 减速比19、 空载转速295 rpm、 负载转速235 rpm、 负载力矩13 kg·cm。
减速电机的输出轴通过联轴器与内绝缘管后端连接, 内绝缘管转动带动转接头同步转动。
绝缘杆长度在1. 4 m 左右, 能够保证安全规程中0. 7 m 以上距离要求; 绝缘杆设计时, 利用挂线杆挂在无人机底座上, 控制部分处于无人机正下方, 电机部分与工具各在绝缘杆前端, 使得整套工具的重心在无人机的正下方, 从而保证了无人机的平衡。
2.1 切割方案设计
切割组件设计如图4 所示, 包括刀片安装盘及长100 mm、 宽18 mm、 厚0. 40 mm 的刀片, 刀片安装盘连接于转接头前端。 通过蓄电池带动减速电机旋转, 以转接头传动至刀片, 实现刀片的快速旋转, 从而可以有效的切割漂浮物。 切割组件清除导线上漂浮物的方式如下:
1) 螺纹紧固件将刀片安装盘固定在绝缘操作杆的转接头上, 通过2 套外六角螺栓M5X10 将刀片安装在刀片安装盘, 刀片与水平面相交呈2°的夹角布置。
2) 将蓄电池安装在密封管件并与减速电机通过电线连接, 将与减速电机配套的遥控型控制盒固定在外绝缘管上, 通过8 套抱箍联结杆将外绝缘管固定在无人机底部的横杆上。
3) 操作无人机飞至指定位置, 启动减速电机, 刀片安装盘上的刀片随之转动, 切割配电线路上的异物。

图4 切割组件
2.2 钩取方案设计
配电导线上的漂浮异物, 可以采用钩取方式处理, 如图5 所示。 螺丝钩连接于转接头前端。
钩取方式最为简单, 无需利用绝缘杆的复杂控制装置, 直接将螺丝钩旋拧在转接头的螺纹孔内,控制无人机飞至指定位置, 利用螺丝钩勾住配电线路上的异物, 操作无人机来回运动, 取下配电线路上的异物。

图5 螺丝钩组件
2.3 抓取方案设计
配电线路上的漂浮异物难以用钩取方式处理时, 可考虑采用抓取方式, 如图6 所示。 抓手组件有两种状态分别为“打开” 和“闭合” 状态, 通过绝缘操作杆上的蓄电池、 减速电机、 拉杆等装置, 有效地完成抓手组件“打开” 和“闭合” 状态的转换。 抓手组件清除导线上漂浮物的方式如下:
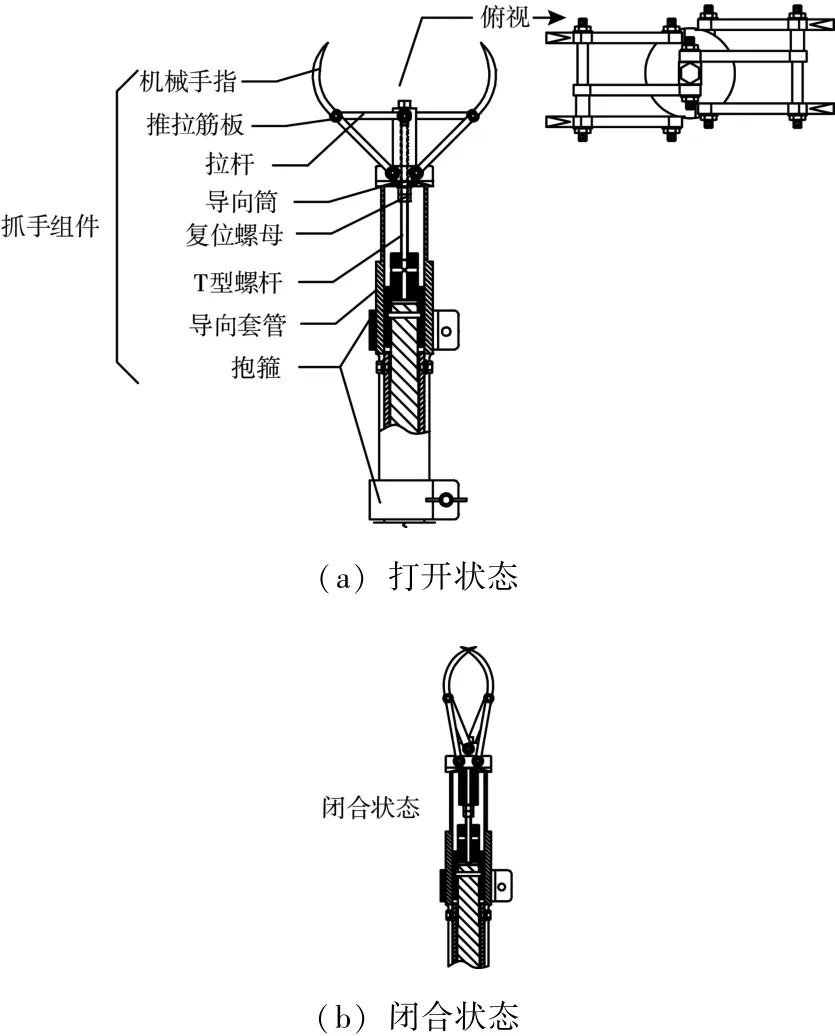
图6 抓手组件
1) 在绝缘操作杆上无操作头时, 将导向套管套装在外绝缘管前端, 旋转T 型螺杆, 使T 型螺杆底部与转接头的螺纹孔连接。
2) 调整导向套管在外绝缘管上的位置, 使两拉杆处于平行状态, 即机械手指展开呈最大状态;然后通过抱箍及蝶形螺母将导向套管固定在外绝缘管上。
3) 操作无人机飞至指定位置, 启动减速电机, 转接头转动带动T 型螺杆上的导向筒在导向套管内向后移动, 导向筒通过拉杆带动各机械手指绕与导向套管的铰接处向内旋转, 逐步靠拢闭合抓紧线路上的异物。
3 测试应用
2020 年7 月15 日设计研制的配电线路漂浮异物清除装置进行了现场应用。 针对10 kV 配电线路设置了风筝、 塑料帯等漂浮异物, 试验现场线路未带电。 通过现场组装验证无人机飞行的稳定性, 测试不同功能组件的可行性, 漂浮异物清除装置如图7 所示。

图7 漂浮异物清除装置
现场无人机飞行平稳, 功能组件测试表明螺丝钩组件能够实现在导线上钩取漂浮异物的功能, 切割组件可以切割缠绕过紧的导线异物, 抓手组件通过开合状态的转变可有效抓取导线上的异物。
测试现场如图8 所示, 对于缠绕在导线上的塑料帯, 从无人机起飞到异物清除用时约为2 min,相比人工处理能够减少20 min 以上, 效率明显提升。 实际测试发现该装置1 人操作1 人配合即可,无需登杆作业, 具有劳动强度低、 安全性能高等优点。 但是无人机在风的作用下会摆动, 这需要飞手操控时注意节奏的调整, 异物清除时, 对目标的处置应快速、 果断。 在风速大于3. 0 m/ s 时应停止操作, 避免无人机损坏和操作不当对配电线路造成损伤。

图8 配电线路异物清除测试现场
4 结语
针对10 kV 架空配电线路上的漂浮异物, 设计一种利用无人机平台搭载漂浮异物清除装置, 运用切割组件、 抓手组件、 螺丝钩组件, 实现了漂浮物的切断分离、 抓取回收等操作。 实际测试效果表明该装置具有方便实用、 劳动强度低、 工作效率高等特点, 能够在带电环境下有效清除导线上的漂浮异物, 为配电线路的安全运行提供保障。
猜你喜欢
智慧少年(2022年7期)2022-06-24 11:53:25
幼儿画刊(2022年6期)2022-06-06 06:55:48
当代陕西(2022年6期)2022-04-19 12:12:26
重型机械(2020年3期)2020-08-24 08:31:42
三峡生态环境监测(2020年2期)2020-07-28 04:50:56
东北电力技术(2018年10期)2018-12-12 08:51:52
制造技术与机床(2018年10期)2018-10-13 06:36:54
特别健康(2018年4期)2018-07-03 00:38:18
工业设计(2016年4期)2016-05-04 04:00:26
工程建设与设计(2016年4期)2016-02-27 10:50:57