
液化天然气船晃荡与冰区运动的耦合分析
2020-11-13 01:51丁仕风周利周亚军
哈尔滨工程大学学报 2020年8期
丁仕风, 周利, 周亚军
(1. 江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2. 中国船级社 上海规范研究所,上海 200030)
北极具有丰富的油气资源,吸引着全球关注。北冰洋具有水深浅、岛屿多的特点,中小型独立式液化天然气(liquefied natural gas, LNG)运输船可以灵活穿梭,承担起中短途液化天然气的运输任务,具有较好的市场前景。冰区航行过程中,船舶运动速度受到海冰影响会发生扰动,进而激发液舱内液体晃荡,对船舶的冰区运动性能构成影响,是发展中小型独立式LNG船所需要突破的技术问题。
冰载荷[1-3]和晃荡载荷[4-6]是当前的研究热点,具有强非线性、冲击特性,对冰区航行船舶的安全构成重要影响[7]。研究晃荡的主要方法包括理论解析法[8],试验法[9-13]和数值计算法[14-20]及降低晃荡的措施和方法[21],随着计算方法逐渐成熟,考虑船舶与晃荡耦合的研究成为热点[22-24]。不同于一般的液货船[25],冰区航行船舶的运动响应尤为重要,关系到船舶破冰性能和航行安全。
考虑“船-冰-液”3者的耦合作用,本文关注独立式LNG运输船液舱晃荡与冰区运动响应的耦合作用:采用环向裂纹法预报层冰航行时的船舶运动时历,以该运动为激励条件,模拟独立式LNG运输船液舱内的晃荡,考虑晃荡载荷与冰载荷的耦合作用,研究考虑液舱晃荡的船舶运动响应特征,分析晃荡作用对船舶航行性能的影响。
1 耦合分析方法
1.1 船-冰力学模型
在层冰与船体作用过程中,层冰在竖直方向承受弯曲作用,在水平方向承受挤压作用,因此会产生平行于接触面的环向裂纹或者垂直于接触面的径向裂纹,采用环向裂纹法可以较好的模拟该破冰过程。
平整冰破碎后产生的浮冰几何形状可假设为扇形,破冰扇形角度为θ,破冰半径[26]可根据破冰速度、海冰特征长度、层冰厚度等关键参数计算得到。
基于裂纹扩展法的冰载荷数值预报方法具有较好的可靠性和计算精度,周利等[1-3]采用该方法多次与国外冰池试验结果进行了对比验证,图1为某极地船数值预报值与冰池模型试验值的比较。
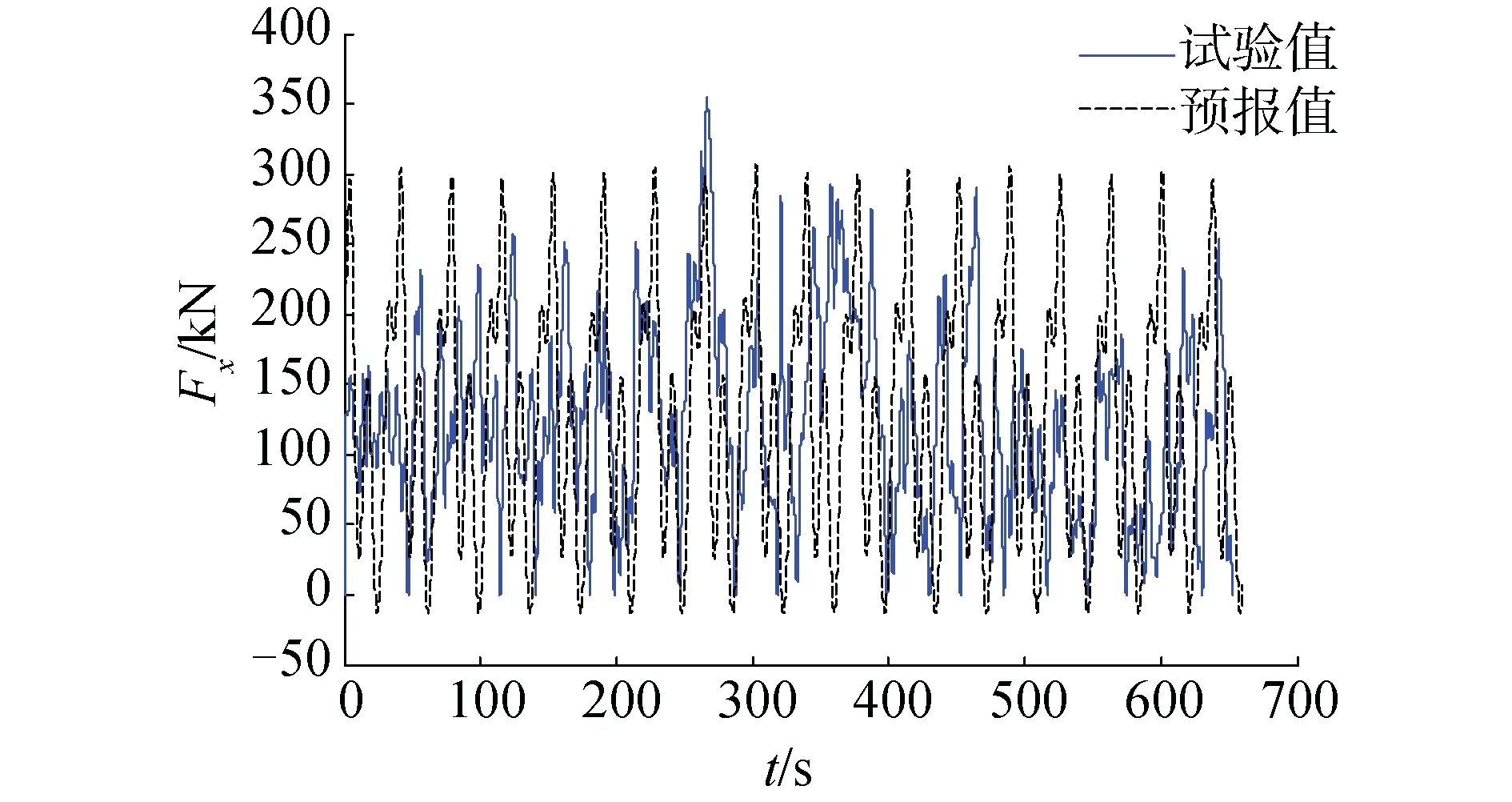
图1 裂纹扩展法与试验结果的对比Fig.1 The comparison between numerical method and ice model test
由图1可见,裂纹扩展法预报结果与冰池模型试验吻合度较好:冰载荷时历曲线的趋势与试验值基本一致,冰载荷变化周期极为相似,最大冰载荷非常接近。因此,本文采用裂纹扩展法开展船-冰作用模拟是可行的。
1.2 液舱晃荡模型
流体体积法(volume-of-fluid,VOF)法具有存储量小、计算时间短等优点,是分析三维LNG 液舱模型的常用方法[27],本文采用Fluent软件中的VOF模块开展三维独立液舱的晃荡模拟分析,采用流体体积分数法追踪模型的自由液面,具有较好的模拟效果。
液舱的舱壁采用二维刚体有限元网格模拟、LNG采用三维流体网格模拟。在计算前对计算域进行离散化,包括:几何空间采用Green-Gauss node based格式进行离散,压力空间采用Body Force Weighted格式进行离散,动力场采用Momentum格式进行离散,体积分数采用Geo-Reconstruct格式进行离散,在模拟液体自由液面时可获得较高的计算效率。
在计算过程中定义与时间相关的船舶速度曲线,通过动网格赋予液舱舱壁刚体强迫运动,激发液舱内液体的晃荡。晃荡计算时基于压力基求解器,采用标准的k-ε湍流方程,监测由于液体晃荡对液舱引起的总体反作用力。
1.3 耦合分析方法
对于在冰区航行的独立式LNG运输船,需综合考虑冰区航行、船舶运动和液舱晃荡3者的耦合关系,所采取的耦合分析方式如图2所示。通过船-冰力学分析,获得船舶的运动时历,将其作为激励条件开展晃荡分析,将获得的晃荡载荷与破冰载荷联立形成“船-冰-液”耦合模型,研究液舱晃荡对冰区航行性能的影响。
在实施具体计算时,以给定功率下船舶破冰航行引起随时间小幅度扰动的运动特征,以该时域速度曲线为初始条件,赋予LNG液舱周界以动态的强迫运动,模拟部分装载条件下的液体晃荡现象,并监测液舱受到由于液体晃荡产生的瞬态反作用力Fx-sl和My-sl。进一步将该晃荡反作用力的时历曲线代入基于裂纹扩展法的“船-冰”作用模型,使晃荡力与破冰力相互叠加,获得海冰撞击和液体晃荡联合作用下的经一次耦合的船舶运动时历曲线,并分析其对船舶冰区运动性能的影响。
2 船舶破冰运动分析
本文选定一艘具有破冰能力的冰区液货船为研究对象,该船垂线间长为150 m,型宽21.3 m,吃水9.5 m。船舶从以恒定推进功率在层冰中运动,见图3,主要输入参数如表1所示。
在持续稳定的推进输出功率作用下,随着船-冰作用过程,船舶速度稳定在0.8 m/s(1.5 kn)左右,速度曲线呈规则的扰动,变化幅值约0.35 m/s,周期约6 s。
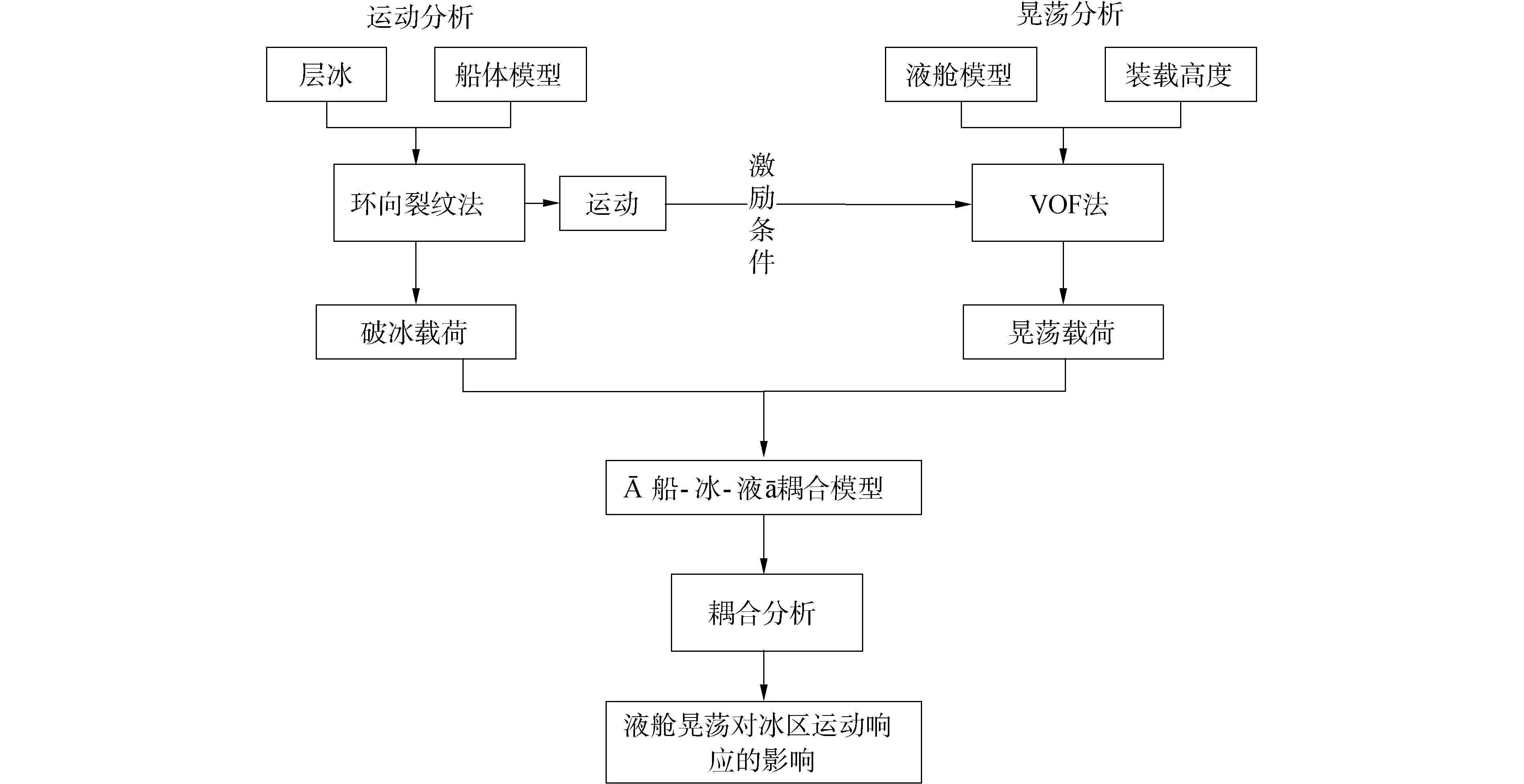
图2 耦合分析过程Fig.2 Couple analysis process

图3 船-冰模型及作用过程Fig.3 Model and interaction of ship and level ice
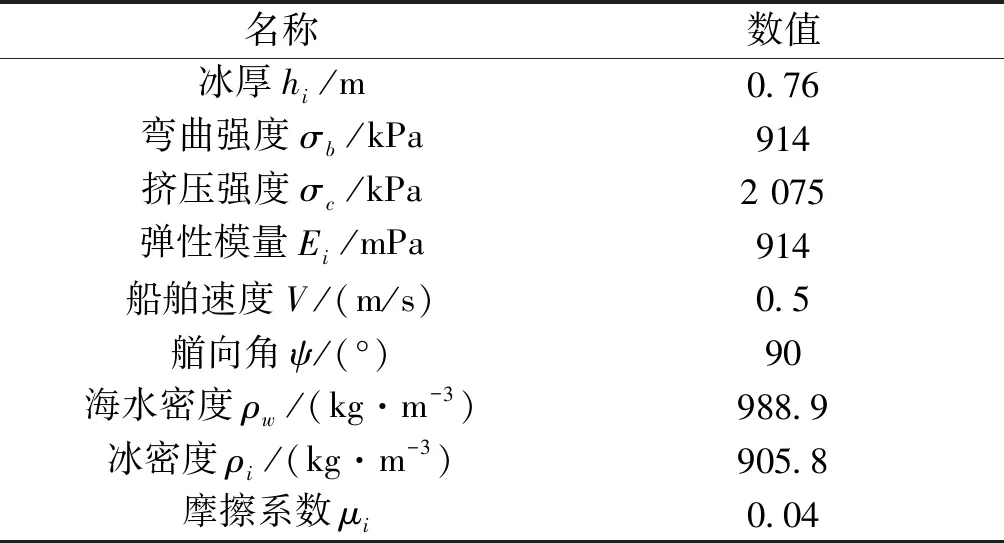
表2 冰区运动分析的输入参数Table 2 Input parameters for motion response
基于环向裂纹法的船-冰作用模型,船与冰发生“接触-破坏-脱离-再接触”的循环过程,由图4可见:船舶与海冰发生挤压,载荷增大、速度降低,直至海冰发生环向裂纹破坏,载荷降低、航速增加。该速度变化趋势正是液舱晃荡的激励条件。
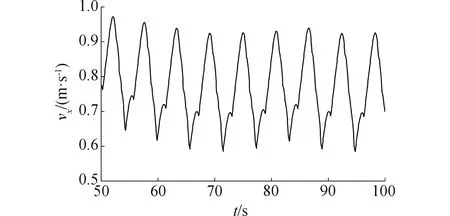
图4 船舶冰区速度时历曲线Fig.4 History of ship velocity in level ice
3 液舱晃荡分析
3.1 冰激晃荡模拟
选择独立式双耳罐液舱(见图5)作为晃荡研究对象,液舱长度L、宽度b、高度h分别为32.0、18.0、12.0 m,双罐间距为6.0 m,分别考虑30%h、50%h和70%h3种装载高度,采用Fluent软件中的VOF计算模块,基于动网格技术,分别模拟液舱在冰区航行运动激励条件下的晃荡。

图5 三维液舱晃荡模型Fig.5 3D sloshing model
采用VOF法对冰激液体晃荡进行模拟,记录在半个周期(53~57 s)的瞬时自由液面和晃荡压力分布见图6。


图6 瞬时晃荡自由液面和压力分布云图Fig.6 The instantaneous free surface and pressure distribution of liquid sloshing
由图6可见,冰激晃荡可看成自由液面的准静态晃动过程:1)自由液面变化较为规律,在53 s时液体堆积在舱室一端,瞬时晃荡压强的极值达到70.4 kPa;在54~56 s自由液面逐渐平缓,并向液舱另一端积聚;在57 s时在舱室另一端形成液体堆积,瞬时晃荡压力极值达到62.2 kPa。2)压力频域分布处于线性状态,未出现明显的冲击动压力分布点,该现象可视为液舱晃荡定义中的晃荡水平[28]。
3.2 晃荡总体载荷
在航速小幅扰动激励条件下,经计算,晃荡载荷的主要成分为:x和z向的液舱合力Fr,y和z向的弯矩,不同装载高度下的晃荡载荷时历见图7。

图7 晃荡对液舱产生的载荷Fig.7 The load on the tank caused by liquid sloshing
在航速变化的运动激励下,液体晃荡对液舱形成晃荡作用力,载荷呈规律的变化:随着装载高度的不同有所差异,30%h~70%h的晃荡载荷约周期为8~11 s,与冰区船舶航速扰动周期6 s存在相位叠
加效应;晃荡诱导的液舱晃荡的主要合力成分为Fx-sl和My-sl,存在与破冰载荷叠加效应,直接影响着船舶破冰能力,需关注该问题。
4 “船-冰-液”耦合分析
4.1 “船-冰-液”耦合方法
为考虑船舶冰区航行和液体晃荡联合作用下的船舶运动特征,将晃荡诱导载荷与和破冰载荷方程进行联列,并代入基于裂纹扩展法的“船-冰”作用模型中,实现“船-冰-液”3者的一次耦合:
考虑内部晃荡与船舶破冰的船舶载荷为:
(1)

4.2 耦合作用下船舶运动响应预报
分别考虑30%h、50%h和70%h3种装载高度下液舱内的晃荡载荷Fx-sl和My-sl,代入式(1)进行计算分析,船舶的航速和纵摇时历曲线如图8。
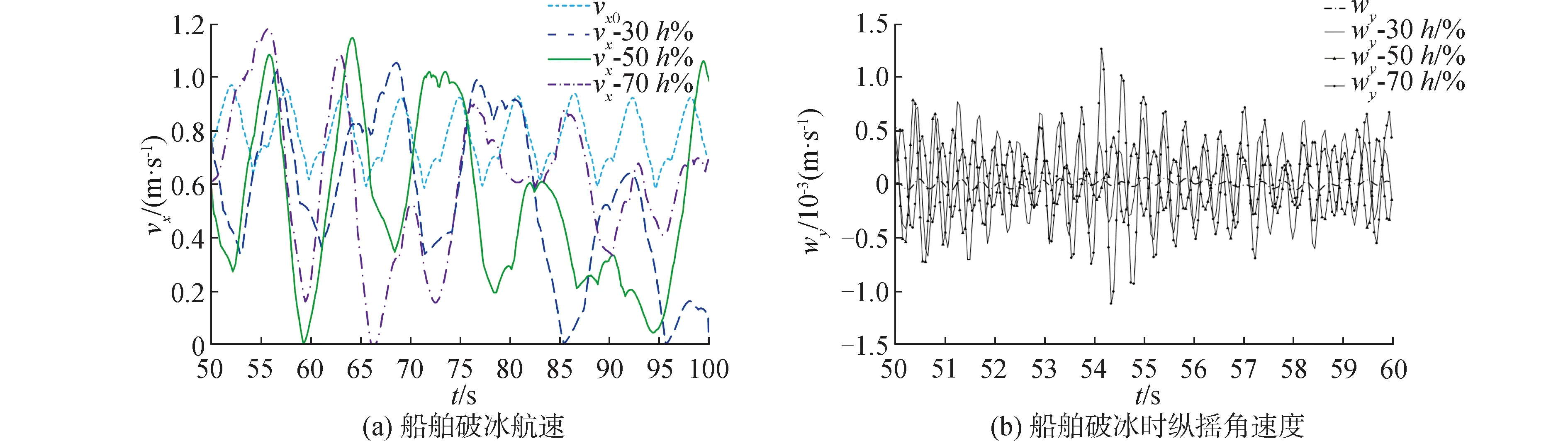
图8 晃荡对船舶运动响应的影响Fig.8 Impact on ship motion response due to sloshing
由图8可见,液舱晃荡对破冰航速影响较大,主要体现在晃荡载荷与破冰载荷叠加,增大了船舶航速变化的周期,航速曲线的离散程度加大。部分位置出现了航速为0的时刻点,这些点主要是由于破冰载荷峰值与晃荡载荷峰值的相位发生重叠,形成了巨大的船舶阻力,导致船舶航速快速降低,该情况会大幅降低船舶的冰区航行性能,导致船舶发生冰困。
仅有破冰载荷作用下,船舶的纵摇几乎可以忽略不计,由于“船-冰-液”3者的耦合作用,船舶呈现高频的纵摇运动,纵摇周期约为0.8~1.0 s,该运动将对船舶运动性能、船舶共振、船舶舒适性等构成重要影响。
4.3 液舱晃荡对船舶冰区航行性能的影响
根据本文的研究,在给定主机推进功率的冰区航行条件下,计及液舱内晃荡对船舶冰区航行性能的影响主要体现在:
1)船舶的冰区航速与推进功率呈正比、与海冰强度呈反比,推进功率越大、海冰强度越低,船舶航速时历曲线越平稳,有利于抑制液舱内的晃荡现象。本文选择目标船为IA冰级,对应的冰区航行能力为0.8 m层冰,在本文设定的0.76 m层冰厚度下,在给定推进功率条件下的航速维持在0.8 m/s(1.5 kn),经叠加液舱的晃荡反作用力,航速降低趋势明显,平均航速降低到0.5 m/s(1 kn)左右,降幅达到37.5%,最低航速逼近0点,处于船舶发生冰困的临界点,是冰区航行的危险状态,需要避免;
2)晃荡载荷周期与破冰载荷周期的重合度较低,可忽略2者共振效应,本文的算例中当装载高度由30%增加到70%时,晃荡周期由11 s降低到8 s,仍与破冰载荷的周期5 s相差35%以上,晃荡与破冰发生共振的可能性较低;
3)计及晃荡反作用力时,将在船舶运动方程中增加总体弯矩载荷My,使船舶发生明显的纵摇运动响应。海冰作用在船体外壳上主要增加冰区航行阻力Fx,其引起的船舶纵摇几乎可以忽略不计;当液货高度为30%h时,瞬时最大纵摇角速度增加到0.105 rad/s;当液货高度增加到50%h或70%h时,该最大值达到0.123 rad/s,增幅明显,将影响船舶的破冰姿态,不利于冰区操作的稳定性。
由此可见,避免部分装载时遭遇严重冰况(系指接近目标船舶冰区设计能力的冰况)是独立式LNG船冰区航行安全的必要条件,需引起足够的重视。
5 结论
1)船舶冰区航行过程时航速会出现周期性扰动,激励液舱内发生液体晃荡,该晃荡载荷又进一步影响船舶的运动响应。
2)在设计极地独立式LNG船时可限制LNG装载水平或提高冰区推进功率,以降低液体晃荡载荷和破冰阻力的耦合作用对船舶冰区航行性能的影响。
针对极地船舶冰区航行,探讨了破冰与晃荡联合作用对船舶运动响应的影响,初步揭示了极地LNG运输船的运动特征,是开展LNG船型线设计、液舱设计和推进系统设计的必要输入。在后续的研究中,将进一步深入研究耦合分析的核心算法,提高数值耦合分析的水平。
猜你喜欢
吉林电力(2022年1期)2022-11-10
水上消防(2022年1期)2022-06-16
能源工程(2022年2期)2022-05-23
疯狂英语·新读写(2021年6期)2021-08-05
海洋开发与管理(2020年2期)2020-09-10
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
舰船科学技术(2018年7期)2018-07-25
创新作文(1-2年级)(2017年7期)2017-12-26
中国水运(2017年5期)2017-05-22
