线阵CCD低仰角测试弹着点适应性分析*
2020-11-11 08:15王玉龙张亚辉卢小汐
弹箭与制导学报 2020年3期
王玉龙,张亚辉,卢小汐,张 亮
(中国华阴兵器试验中心, 陕西华阴 714200)
0 引言
线阵CCD立靶测量系统是一种利用两台高速线阵CCD测试火炮弹丸立靶弹着点的测试系统,系统具有测试精度高,连发测试能力强等优点[1-5]。该类测试系统因为测试精度的需要,要求两台相机中轴线向上抬高45°,在空中形成一个共同覆盖区域[6-7],这个区域即是系统测试范围。当测试系统布置在地面时,所形成的测试范围常常高出地面数米至十多米,导致靶心距地面过高。如果射击试验的火炮按照这个高度进行直瞄射击,落弹区将会远远大于平行地面射击的情况,使得清场警戒甚至事后瞎火弹销毁的工作量成倍增大。也正因为以上原因,目前线阵CCD立靶测量系统在兵器试验靶场很少应用。文中基于线阵CCD立靶测量系统的测量原理,探讨了如何降低测试系统测试区域以及因此带来的目标识别问题,分析了降低测试区域带来的误差问题,为测试系统及这种测试技术的广泛应用奠定了基础。
1 线阵CCD测量原理
1.1 系统摄像过程
线阵CCD立靶测量采用等待测量方式,以天空为背景。当相对背景为暗目标的弹丸穿越靶面后,在线阵图像上成像为一小段黑色,这一小段黑色所成像素大小由目标距相机镜头的距离决定,如图1(a)所示。线阵图像拼接成的二维图像上形成一个类似弹丸的目标,如图1(b)所示。
1.2 目标交会计算原理
将两台线阵CCD测量站布设在地面上。摄像系统仰角为45°,两个CCD视场的公共交会区构成空间坐标测量靶面,如图2(a)所示。当有目标穿过空间靶面时,利用几何和光学原理,即可求出目标在空间靶面的坐标,如图2(b)所示。

图1 线阵CCD拍摄过靶弹丸过程

图2 线阵CCD交会测量示意图
测量单元分别安装在A、B两处,A、B两点连线称为基线S,AB=s。若以A点为坐标原点,基线S为X轴,高度方向为Y轴,在视场范围内,测点A、B的仰角分别为α、β,γ=180-α-β,则被测点I的空间坐标数学表达式为:
(1)
2 低仰角交会靶面参数计算
在线阵CCD立靶测试中,线阵CCD相机视场角为54°,理论上A、B两台线阵CCD相机交会的公共区域(如图3蓝色区域)都可以作为测试靶面,但该区域是一块不规则的靶面,通常情况下都是以一个规则的矩形作为靶面。该区域大小主要受靶面高度L、摄像系统仰角α、基线长度s三个参数的影响,这三个参数互相关联,只需确定两个参数,余下一个参数就能确定。

图3 线阵CCD交会原理图
为了分析仰角调整后的靶面能够满足原靶面的布设要求,需将靶面高度固定,分析仰角变化带来的靶面宽度、基线长度和靶心高度的变化。设靶面高度DN=L,摄像系统仰角为∠DAB=α,则可确定靶面的相关参数如表1所示。

表1 靶面参数
摄像系统最低仰角从28°开始分析,当采用45°仰角交会,测试精度高,但靶心太高,因此主要分析摄像系统仰角在28°~45°区间变化,以此带来的靶面参数变化。文中重点分析仰角变化后,需满足试验10 m×10 m靶面布设要求,带来的各项参数的变化。
将靶面高度10 m固定,调整基线和摄像系统仰角,分析计算CCD摄像系统仰角在28°~45°区间变化的靶心高和靶面下边沿距基线高、靶面宽度和最远探测距离等参数,如表2所示。
表2 布设10 m×10 m靶面不同仰角的靶面参数表 m

图4 仰角与靶心高和靶底距基线高的参照图
从满足试验靶面10 m×10 m不同的摄像系统仰角分析知:
1)当摄像系统仰角变小时,要满足试验10 m×10 m靶面要求,需增加基线的长度,两台线阵CCD交会的最大矩形区域由正方形区域变为长方形区域,仰角越小基线越长,靶心距地面的高度越低,但相机的最远探测距离增加,因此会引起目标识别的变化。
2)要满足试验10 m×10 m靶面要求,当用32°仰角交会时,靶心距地面约为6.6 m,比45°仰角交会的靶心高9.8 m低了3.2m,其靶面的下边沿距地面约为1.6 m,比45°交会的4.8 m低了3.2 m,大幅减少了靶面下边沿的空白区域,而靶面区域为11.6 m×10 m比10 m×10 m靶面的宽度增加了1.6 m。在立靶试验中,可根据图4 中靶心和靶底距基线高的区间指示图选择不同的摄像系统仰角,满足不同立靶试验要求。
3 低仰角交会目标识别分析
3.1 目标成像像元数计算
目标判别主要依据目标形状的先验知识。由相机的视场角54°,CCD像元2 048个,线阵CCD帧频50 kHz,假若弹丸直径为D(mm),距离镜头R(m),可计算弹丸在镜头R距离处,所对应的理论像元数为:
(2)
以23航弹为例,靶面高度10 m时,摄像系统仰角在28°~45°范围内,按最大角选取相机最远探测距离Rmax=22.023 m,则目标成像的最小像元数为Nmin≥2.2,即目标在相机成像的最小宽度不小于2.2个像素点。
3.2 过靶成像帧数计算
假定弹长l,弹速v,目标越靶时间t=l/v,相机曝光周期T,则最大曝光帧数为:
(3)
对于靶面宽度10 m成像像元数与过靶成像帧数如表3所示。

表3 典型目标成像特性
对于单个相机而言,对目标进行识别,在相机捕获率大于98%的条件下,要求目标在相机上成像的像元数不小于3个像元,反之其捕获率低。
通过降低摄像系统仰角降低靶心的方法,要满足10 m×10 m靶面要求,需增加基线的长度,则相机的最远探测距离增加,因此目标成像的像元数与原系统相比会减小,通过表中的数据可看出,对于降低仰角后的10 m靶面,要保持高的捕获率,只能测试30 mm弹径以上的弹丸。
4 测量精度分析
4.1 单台线阵CCD经纬仪理论测角误差
单台CCD经纬仪理论测角误差由经纬仪单次定向误差、线阵CCD读数的测角量化误差和畸变校正误差组成。
1)经纬仪单次定向误差
经纬仪进行测回法测角,一测回垂直测角中误差为±5″,引入视轴晃动误差(±20″)、垂直轴倾斜误差(±10″)、测角系统单次测量误差(±3″)等,则经纬仪的单次定向测角误差为:
(4)
2)线阵CCD读数的测角误差为:
(5)
3)畸变校正误差
畸变校正误差主要来源于σ1、σ2和检测校正的目标光管与检测架稳定度误差(±3″),则畸变校正测角误差为:
(6)
由以上分析可知,CCD经纬仪理论测角误差σ′为:
(7)
4.2 单台线阵CCD经纬仪综合测角误差
综合测角误差系指设备在野外工作,受到风力、温度、振动、弹丸飞行等影响下的测量误差。一般情况下,综合误差是理论误差的130%~150%,取值150%,这样测量单元综合测角误差σ为:
σ=1.5σ′=1.5×42.5″=63.75″
(8)
4.3 坐标测量误差分析
根据前述测量原理及误差传递公式对坐标精度分析如式(9)~式(12)所示。
(9)
(10)
根据误差独立原则,均方根误差为:
(11)
(12)

图5 靶面典型位置分布图

表4 立靶典型位置交会测量误差表
按上述方法计算,摄像系统仰角从28°~45°变化时,靶面高度10 m,靶面宽度随仰角变化,可计算其变化范围为10~12.2 m,表5分析了不同仰角交会靶面的x方向的均方根误差和y方向的均方根误差。

表5 线阵CCD不同仰角交会测量均方误差表

图6 线阵CCD不同仰角测量误差变化曲线图

图7 线阵CCD不同仰角测试精度区间图
从表5和图6、图7中的数据可得出:
1)对于同一靶面宽度,当摄像系统采用45°仰角交会目标时,测试精度最高,随着仰角的降低,测试精度降低,精度在靶面下沿中心最差,试验时尽量避免此区域。
2)当线阵CCD摄像系统仰角大于32°时,测试精度优于50 mm;大于33°时,测试精度优于40 mm;大于38°时,测试精度优于20 mm;当摄像系统仰角为45°时,此时系统的测试精度最高,测试精度优于15 mm。
4.4 试验应用分析
要满足10 m×10 m立靶试验的靶面要求,靶面下边沿距地面的高度要小于3.5 m,测试精度小于50 mm,采用线阵CCD测量。通过前述分析可知,只需选用摄像系统仰角区间为32°~38°进行测量,测试精度优于50 mm,即可满足试验要求,图8是可选用仰角的区间示意图。表6是线阵CCD典型仰角交会的参数对比表。
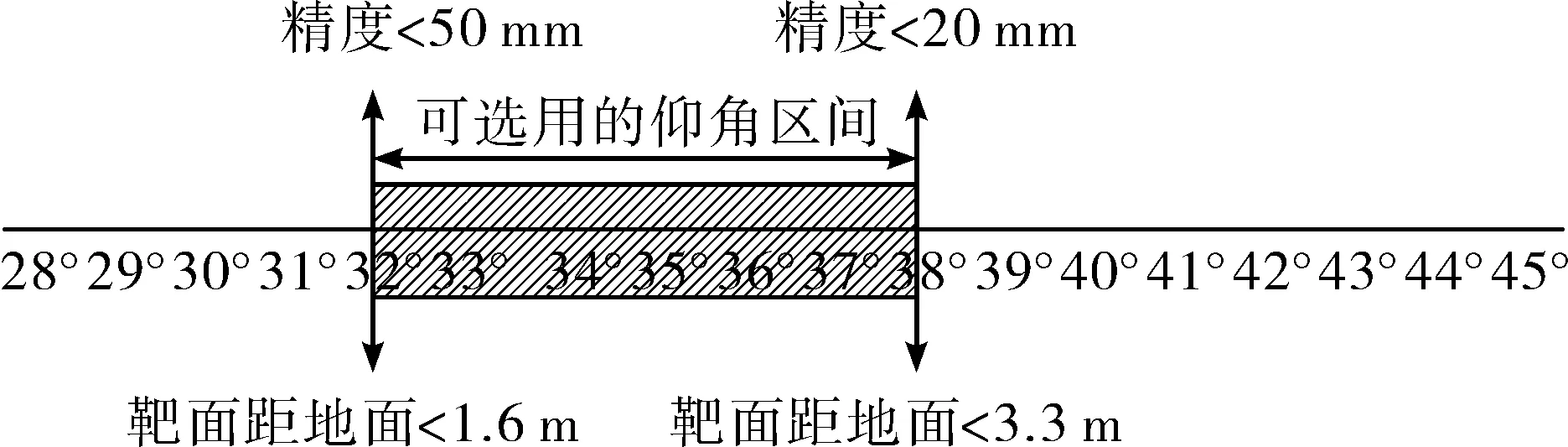
图8 线阵CCD可选仰角区间示意图

表6 线阵CCD典型仰角交会的参数对比表
5 结论
针对线阵CCD立靶测量系统采用45°仰角交会导致靶心距地面过高,很难满足立靶坐标测试试验要求的问题,提出了通过降低摄像系统仰角满足靶面要求的方法。分析表明:该方法在降低摄像系统仰角的同时其靶心高度和测试精度皆有所降低,不同的摄像系统仰角对应不同的靶心高和测试精度。试验人员可根据靶面要求和测试精度要求合理选择摄像系统仰角,以满足不同试验需求。
猜你喜欢
阅读(高年级)(2022年6期)2022-06-17
初中生世界·七年级(2021年2期)2021-03-12
汽车维修与保养(2020年11期)2020-11-23
初中生世界·九年级(2020年2期)2020-04-10
北京航空航天大学学报(2019年9期)2019-10-26
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12