
高负荷赛前训练下游泳姿势轨迹跟踪方法分析
2020-11-10 03:30刘飞
商丘师范学院学报 2020年12期
刘 飞
(齐鲁师范学院 体育学院,山东 济南 250200)
游泳是技巧性很强的运动科目,游泳的泳姿是决定游泳技能水平的关键因素,需要进行游泳泳姿的优化调节,改善游泳运动员的水感,提高训练质量.进行高负荷赛前训练下游泳姿势轨迹跟踪控制,对提高游泳泳姿的姿态定位调节能力方面具有重要意义,在不同的水感条件下,进行高负荷赛前训练下游泳姿势轨迹跟踪训练,通过泳姿训练调节,感受水流方向和速度,分析划水的次数,结合人体受力特征分析方法,实现高负荷赛前训练下游泳姿势轨迹跟踪控制[1].研究高负荷赛前训练下游泳姿势轨迹跟踪方法,提出一种基于修正的DH参数融合的高负荷赛前训练下游泳姿势轨迹跟踪方法,构建高负荷赛前训练下游泳姿势轨迹跟踪控制的约束参量模型,建立高负荷赛前训练下游泳运动学模型,采用姿势轨迹跟踪方法,进行高负荷赛前训练下游泳姿势轨迹跟踪的自适应控制,建立修正的DH参数融合模型,实现游泳姿势轨迹跟踪控制优化,最后进行仿真实验分析,得出有效性结论.
1 游泳运动人体运动链结构和参量模型
1.1 游泳运动人体运动链结构

图1 游泳运动过程中人体空间位置模型
为了实现对高负荷赛前训练下游泳姿势轨迹跟踪分析,需要首先构建高负荷赛前训练下游泳姿势轨迹跟踪控制的约束参量模型[2],本文主要采用的是Lagrange动力学模型构建方法,在六自由度空间中分析游泳运动人体运动链结构,结合轨迹生成传感器建立六自由度空间内的高负荷赛前训练下游泳姿势轨迹动力学模型[3],对游泳中的矢状面特征分量进行信息融合,采用动态基元调节方法,求解游泳运动人体运动链结构模型,在局部受力条件下,对游泳过程中的力学参数进行全局分析,得出各点位姿与驱动变量的速度关系,构建高负荷赛前训练下游泳姿势轨迹跟踪的优化解向量.首先分析在游泳运动过程中人体进行游泳的空间位置模型,如图1所示.
图1中,游泳池为一个标准游泳运动场,人体在进行入水的空间向量幅值C、游泳的空间位置的阵列间距D、人体入水的仰角为θ、由腰部和左(右)手臂的方位角φ、与游泳池边界的距离r互相关,位置控制采取逆雅可比法,得到三个旋转自由度的空间向量估计参数为:
(1)
由于在游泳运动中,入水的空间位置为一个均匀线列阵,在冗余自由度中,根据空间运动规划理论[4],可以得到驱动变量与虚拟关节变量关系模型满足:
cos(φi)+cos(φi+M/2)=0
(2)
(3)
其中,以手掌处的关节进行世界坐标系构建,新位置在曳物线上[5],基座的位移为d1,膝盖关节单元i的在进行发力过程中,设人体入水的手臂运动链为:

(4)
在游泳运动人体运动链结构中,关节可以近似看作为一个固定中心,构建高负荷赛前训练下游泳姿势轨迹跟踪控制的约束参量模型,结合雅可比矩阵的数值法进行游泳姿势轨迹惯性参量特征分解,进行轨迹跟踪控制[6].
1.2 游泳运动参量模型分析
在上述构建高负荷赛前训练下游泳姿势轨迹跟踪控制的约束参量总体模型构建和运动链分析的基础上,进行游泳运动的运动参量模型分析,在六自由度空间中分析游泳的运动力学模型[7],采用修正的 DH 参数法得到入水中身体的空间受力关系为:
(5)
在每次末端运动量不超过质心惯量的基础上,运用解析法实现对高负荷赛前训练下游泳姿势轨迹跟踪和逆运动学求解[8],游泳运动员入水后的平均运动势能为:
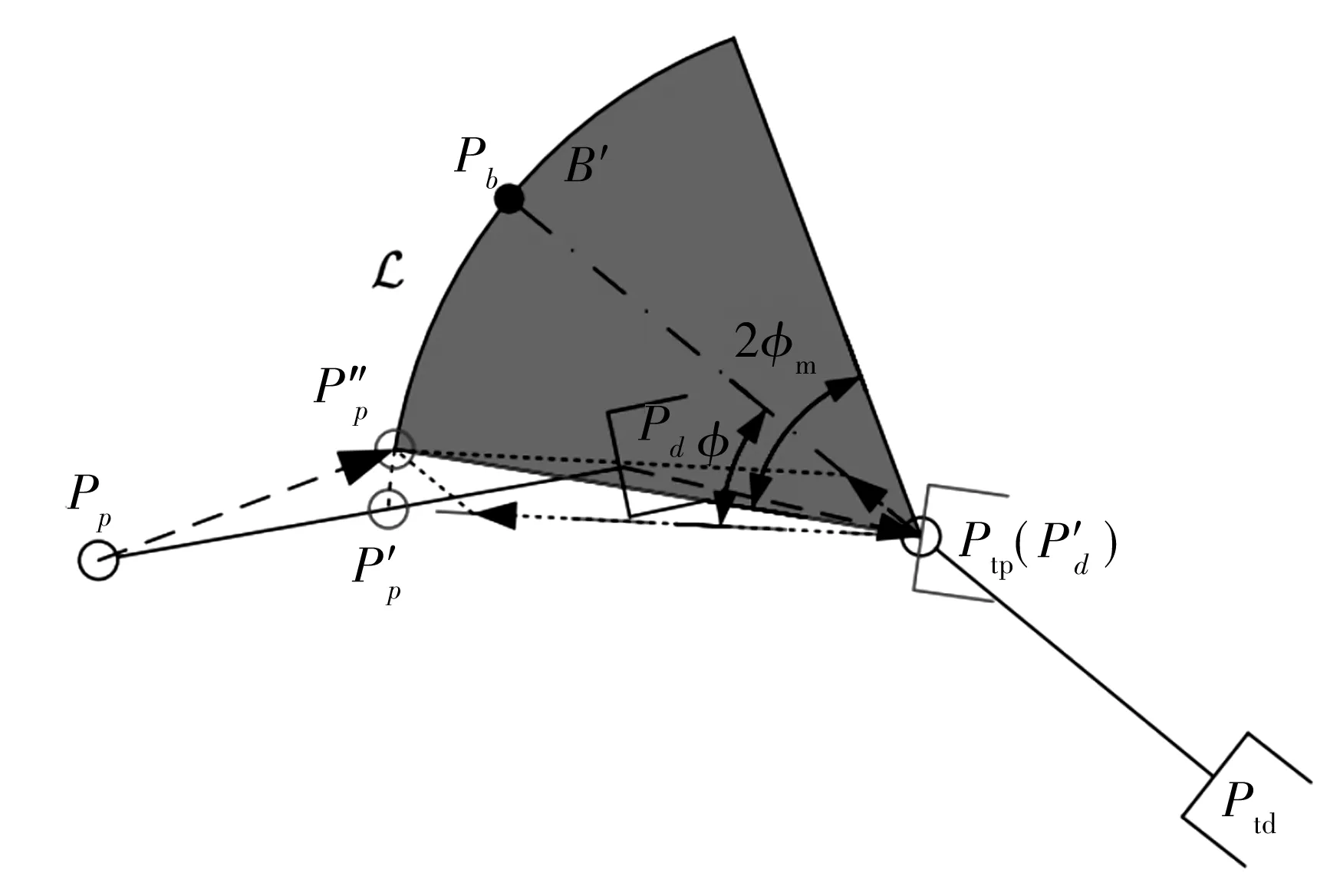
图2 游泳运动自适轨迹的模量关系分布
(6)
在末端跟随运动条件下,得到始端的新位置为:
(7)
按无约束跟随运动确定的始端位置,得到游泳运动员在进行游泳训练中的等效模量关系描述如图2所示.
在含约束的单节跟踪条件下,得到高负荷赛前训练下游泳姿势轨迹跟踪的弹性模量为:
(8)
宏观条件下,关节运动量也是需要考察的指标,游泳运动员入水后泳姿轨迹跟踪的运动偏移量为:
(9)
其中:

游泳运动员入水7个自由度右手臂的参考坐标系定义式:
(10)
其中:
Cijkl—右肘关节应变模量分量;

高负荷赛前训练下游泳姿势轨迹跟踪的运动学方程描述为:
纵向:
(11)
侧向:
(12)
偏转:
(13)

2 模型改进设计与实现
2.1 修正的DH参数融合
对游泳这一惯性力学作用较强的运动模型来讲,力学分析的准确性不好.为了克服传统方法出现的弊端,本文提出一种基于D-H参数融合的泳姿轨迹跟踪方法,结合雅可比矩阵的数值法进行游泳姿势轨迹惯性参量特征分解,建立高负荷赛前训练下游泳运动学模型,采用姿势轨迹跟踪方法进行D-H参数融合,计算游泳姿势轨迹跟踪的惯性关节矢量:
(14)
(15)
(16)
通过前面的模量计算,可以得到游泳运动的齐次坐标变换矩阵,在游泳运动参量模型分析进行参数融合,构建高负荷赛前训练下游泳姿势逆向运动和正向运动的联动方程式描述为:
(17)

(18)
高负荷赛前训练下游泳姿势轨迹跟踪的参考系满足ΣI,对游泳的轨迹分布特征量进行Lagrange动力学实验,得到反向延长线与边界线L的融合特征值为:

(19)
式(19)中,3方向的平移常量pt=[xt,yt,zt]T,建立全新Kalman滤波融合方法实现于D-H参数融合,在六自由度空间中分析游泳的运动力学的分布特征参量模型.
2.2 泳姿轨迹跟踪优化
采用姿势轨迹跟踪方法,进行高负荷赛前训练下游泳姿势轨迹跟踪的自适应控制[10],建立修正的DH参数融合模型,得到游泳运动的力学参数估计结果为:
(20)
计算出加速度计的传感信息,结合信息融合方法,进行游泳运动的惯性力特征估计结果如下:
(21)
(22)
在偏移区域的面积较小时,在六自由度空间中分析游泳的运动力学的分布特征参量模型,采用正向运动学分析模型得到游泳运动力学特征,游泳泳姿轨迹的状态方程和观测方程的离散形式为:
x(k+1)=Φi(k)x(k)+wi(k)i=1,2,…,mz(k)=Hi(k)x(k)+vi(k)i=1,2,…,m
(23)
其中,wi(k)和vi(k)为末端关节运动量和下一节始端关节运动量,对游泳姿势状态量的跟踪控制来实现对高负荷赛前训练下游泳姿势轨迹的自动跟随和优化参数调节,得到信息融合的协方差矩阵分别为Qi(k)和Ri(k).基座关节的运动量稳态控制方程为:
(24)
构建Lyapunov函数,得到游泳姿势轨迹跟踪的Lyapunov矩阵满足:
(25)
结合Lyapunov稳定性原理,得到设计的高负荷赛前训练下游泳姿势轨迹跟踪模型的稳定收敛的.最后得到高负荷赛前训练下游泳姿势轨迹跟踪模型如图3所示.
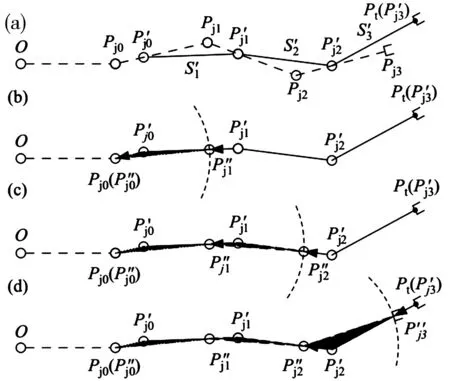
图3 高负荷赛前训练下游泳姿势轨迹跟踪模型
3 仿真实验与结果分析
通过仿真实验进行高负荷赛前训练下游泳姿势轨迹跟踪性能测试,结合Matlab仿真分析方法进行算法设计,实验中采用传感进行游泳姿势轨迹跟踪你的参数采集,采集结果见表1.

表1 参数采集结果
根据上述参量采集结果,设定轨迹跟踪的D-H参数融合系数为b1=0.1,b2=-14.6,b3=14,b3=2cos(2πt),采用设计方法进行高负荷赛前训练下游泳姿势轨迹跟踪,得到跟踪性能曲线如图4所示.

图4 高负荷赛前训练下游泳姿势轨迹跟踪性能曲线
分析上述仿真结果得知,采用该方法进行高负荷赛前训练下游泳姿势轨迹跟踪的自适应性能较好,控制能力较强,提高了游泳姿势的优化调节和自适修正能力,轨迹跟踪性能较好.
4 结 语
在不同的水感条件下,进行高负荷赛前训练下游泳姿势轨迹跟踪训练,通过泳姿训练调节,感受水流方向和速度,分析划水的次数,结合人体受力特征分析方法,实现高负荷赛前训练下游泳姿势轨迹跟踪控制.提出一种基于修正的DH参数融合的高负荷赛前训练下游泳姿势轨迹跟踪方法,构建高负荷赛前训练下游泳姿势轨迹跟踪控制的约束参量模型,结合雅可比矩阵的数值法进行游泳姿势轨迹惯性参量特征分解,建立高负荷赛前训练下游泳运动学模型,建立修正的DH参数融合模型,通过对游泳姿势状态量的跟踪控制来实现对高负荷赛前训练下游泳姿势轨迹的自动跟随和优化参数调节.研究得知,采用该方法进行高负荷赛前训练下游泳姿势轨迹跟踪的自适应性能较好,控制能力较强,提高了游泳姿势的优化调节和自适修正能力.
猜你喜欢
江苏通信(2020年5期)2020-11-13
空间科学学报(2020年3期)2020-07-24
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
现代职业教育·高职高专(2020年10期)2020-01-05
物理学报(2019年24期)2019-12-24
成都信息工程大学学报(2019年4期)2019-11-04
中氮肥(2018年4期)2018-07-31
自动化与信息工程(2015年4期)2015-12-23
燃气涡轮试验与研究(2010年1期)2010-04-16
