基于空化射流技术的养殖网箱水下清洗喷嘴数值模拟
2020-11-06 01:41林礼群王志勇
渔业现代化 2020年5期
林礼群,刘 平,王志勇
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092; 2 青岛海洋科学与技术国家实验室,山东 青岛 266237)
养殖网箱长时间浸泡在海水中常因藻类、贝类等附着物的繁衍滋生,容易堵塞网箱网眼造成网衣耐流能力减小、水体交换率降低,造成鱼类圈养环境恶化,使养殖过程存在死亡率增加的风险。同时,附着物增加了养殖网箱重量与阻力,减少网衣使用寿命[1-3]。因此,网衣清洗是网箱养殖作业过程中的重要任务。现阶段,国外在网箱水下清洗多采用高压水清洗方式,日本洋马株式会社高压射流网箱清洗机器人在多个发达国家大型养殖公司得到较好应用,价格也较贵。中国网箱水下清洗设备一般使用人工携带电动(或液动)旋转刷或者高压水冲洗网衣表面[4-7]。其中,旋转刷不易去除坚硬污物,容易磨损网衣,影响网衣使用寿命;人工携带高压水清洗机冲洗由于反冲力作用易造成安全隐患,效率较低。随着海水养殖由近海走向深远海发展趋势[8-9],安全、高效、节能的网箱水下清洗技术是深远海养殖发展的装备支撑条件之一。
空化射流清洗技术是近年来广受关注的一种新型清洗方式。利用大量的空化泡在物体表面局部微小区域溃灭产生的强大微射流冲击力而达到清洗坚硬污垢和附着海生物的目的,具有高效、节能的特点[10]。目前该技术在油气化工、金属材料表面强化、清洗除锈和生化环保等领域都具有一定的应用[11-14]。空化喷嘴是形成空化射流的关键元件,对其几何形状、物理参数分析研究对空化效果具有重要意义。关于空化射流清洗技术研究,数值模拟方法因利用成熟的数值仿真软件借助计算机强大的计算能力对控制方程进行求解,节省了时间和精力,是目前空化技术的重要研究方法。近年来国内外研究者对水射流技术和空化技术进行了大量的研究工作[15-18],其研究成果主要针对上述石油化工、金属表面强化、清洗除锈等领域,围绕空化产生机理、模型算法、喷嘴几何参数优化等方面展开,但在针对网箱养殖领域空化射流水下清洗方面鲜有报道。
基于流体计算仿真软件Fluent,通过数值模拟得到了清洗喷嘴流场和气相体积分数的分布规律,并研究了喷嘴入口压力和清洗深度对空化射流空化程度的影响,为空化射流技术在网箱养殖水下清洗研究提供一定参考。
1 网箱水下清洗机器人介绍
养殖网箱水下清洗机器人主要结构见图1a,水下载体由轮式行走机构、旋转清洗盘(清洗盘内布置有3个空化喷嘴)、推力吸附螺旋桨、框架、浮力模块、密封舱模块等组件组成,通过脐带缆连接水上电源、通信与高压泵装置组成的操控系统执行对水下清洗作业操控。其中,网衣表面的吸附与清洗是通过推力吸附螺旋桨与空化水射流旋转清洗盘共同作用实现,如图1b所示,水上高压水泵出口高压水经过软管依次进入导流轴、高压水出水管,最后经空化喷嘴高速射出打击网衣,同时产生射流反作用力,该作用力一方面作用于清洗盘使其旋转产生更好的清洗效果,另一方面带动与导流轴为一体的推力吸附螺旋桨轴旋转,螺旋桨产生垂直指向网衣清洗面的推力,对清洗表面产生吸附作用。其中清洗机器人能实现高效清洗的关键在于与网箱清洗工况条件匹配的清洗系统参数设计,具体涉及清洗系统泵压参数、清洗深度、喷嘴的几何参数与布置方式等,因此,合理设计清洗喷嘴物理参数是实现水下清洗与吸附功能的重要因素。
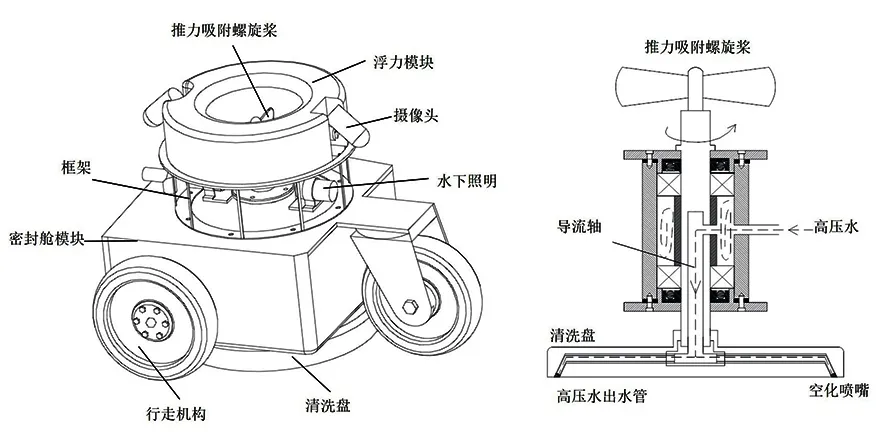
图1 养殖网箱水下清洗机器人结构简图Fig.1 Diagram of the structure of cage underwater cleaning robot
2 数学模型
空化射流涉及多相流模型,采用混合模型,联合水汽两相Zwart-Gerber-Belamri空化模型求解,通过求解混合相的连续方程、动量方程和第二相体积分数方程和空化模型的数学方程,对空化射流角型喷嘴内流进行数值模拟。其连续方程为[14]:

(1)
式中:ρm—混合相密度,kg/m3;t—时间,s;vm—质量平均速度,m/s;m—质量传递,kg/(m3·s)。动量方程为:
(2)
式中:p—压力,Pa;μm—混合相黏度,Pa.s;g—重力加速度,m/s2;F—体积力,N;n—相数;ak—第k相的体积分数;ρk—第k相密度,kg/m3;vdr,k—第k相漂移速度,m/s2。
第二相体积分数方程为:
(3)
式中:ap气相加速度,m/s2;ρp为气相密度,kg/m3;vdr,p为气相漂移速度,m/s2。
3 物理模型
3.1 喷嘴几何模型
对喷嘴圆柱段直径进行理论计算,设高压水泵输出压力为P=20 MPa,流量为90 L/min,即空化喷嘴入口压力为20 MPa,由于清洗盘布置了两个喷嘴,则喷嘴流量取Q=30 L/min,流量系数μ值取0.6,依据高压水泵与流量最佳匹配,可以近似计算喷嘴圆柱段直径d[19]:
(4)
考虑到高压水泵出口至喷嘴入口管路沿程压力损失,喷嘴圆柱段直径要减小0.1~0.3 mm为好[20],所以喷嘴圆柱段实际直径为d=2.3-0.3=2 mm。清洗喷嘴拟采用空化效果较好的角型喷嘴,喷嘴内部结构示意图如图2所示,收缩角取公认的最佳值13.5 °,扩散角取为60 °[21],圆柱段直径d=2 mm,圆柱段、收缩段、扩散段长度分别取为4 mm、5 mm、6 mm,喷嘴入口直径6 mm、长2 mm。

图2 喷嘴内部结构示意图Fig.2 Schematic diagram of the inner nozzle
3.2 边界条件与网格划分
计算流场域如图3所示,考虑到喷嘴具有轴对称几何特性,所以在模拟时取整个流场二维模型的一半区域进行模拟计算。运用Ansys Workbench软件建立喷嘴和流场区域二维模型与网格划分,经过网格质量检验,二维模型通过划分有233 106个网格,检查网格正交质量为0.999,最小体积为正,表明网格质量非常好,可以进行模拟计算。边界条件为两个压力入口和一个压力出口。其中,喷嘴入口压力、流场入口与出口压力根据清洗系统压力与清洗水深不同分别设置。由于流动过程为圆口射流的湍流,选用Realizable k-ε湍流模型较适合,可以给出更好的射流扩展角,近壁区域采用增强壁面函数法对其处理,该方法能较好地应用于复杂流动及低Re区的流动。
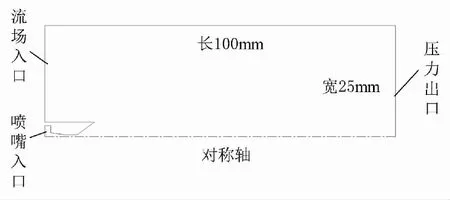
图3 流场计算区域与边界Fig.3 Calculation area and boundary of flow field
4 数值模拟结果与分析
4.1 喷嘴入口压力对流场速度与空化的影响
图4是在深度10 m条件下,不同喷嘴入口压力条件下所得流场速度分布云图,图中可以看出不同压力下的速度流场分布基本一致,流速在喷嘴圆柱段前后迅速增大,沿轴向形成一定范围的等速势流核,势流核最大值随压力增大而明显增大,且轴向流速随着轴向距离的增加而不断衰减。结合图5知,随着压力的增大,喷嘴入口压力从10 MPa到40 MPa变化时,轴线上最大速度由150 m/s增至303 m/s,且保持大流速的轴向范围也有所增加,但是增加幅度不大,也就是说对有效清洗靶距的影响不大。表面污物清洗是打击力与清洗靶距的共同作用效果,根据能量守恒原理,较高压力通过喷嘴能够转化获得较高动能,当高速流体作用于清洗表面,把射流动能转化为清洗打击力,实现对物体的清洗。因此,提高喷嘴压力是实现物体表面清洗的途径之一。但喷嘴入口压力的增大,表示清洗系统泵压加大,影响系统成本、密封性能、水下潜器平稳性等,需综合考虑多方面因素条件选择合适的泵压。
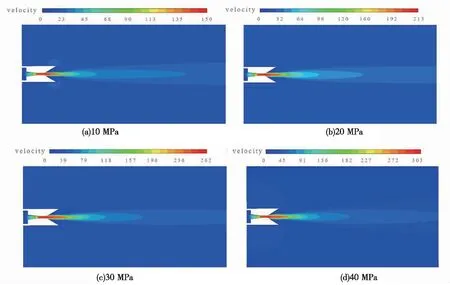
图4 不同压力下流场速度分布云图Fig.4 Contours of velocity under different pressure condition

图5 轴线上速度变化Fig.5 Velocity variation on the axis
图6是深度为10 m条件下,不同喷嘴入口压力条件下气相体积分布云图,由图6可知,喷嘴出口均产生了空化气泡,且主要产生于喷嘴圆扩张段壁面内。随着压力的增加,气相体积分数也随之增大,范围逐步增大,当喷嘴入口压力为10 MPa时,最大气相体积分数为0.69,当喷嘴入口压力为40 MPa时,最大气相体积分数增至0.99,显然,空化程度逐渐加强。空化的产生可以获得更好的冲蚀性能,提高清洗能力,因此,增大喷嘴入口压力也是空化产生的有效方法之一。
4.2 清洗深度对空化的影响
图7是喷嘴入口压力为20 MPa条件下,不同水深围压条件下气相体积分布云图。其中,图7a是深度为0(刚好淹没)条件下所得气相体积分数,图中可看出,相比其他深度的气相分数分布情况,此时空化效果最为明显,气相体积分数及分布范围都最大。结合图8知,随着水深的增加,气相体积分数逐渐减小,空化范围逐步减小,气相体积分数由0.97减至0.66,且减小速率逐渐变缓,直至趋于不变,即当水深达到20 m后,深度对空化射流影响逐渐减弱。实际养殖网箱大多置于水深30 m内,由于水深对空化影响,在其他参数条件不变情况下,深水处的网衣清洗效率和效果会明显低于浅水处,由于水深环境不可改变,可通过改变系统泵压、喷嘴几何参数、喷嘴数量与布置方式、清洗靶距等清洗条件因素来提高清洗效率。

图6 不同喷嘴入口压力条件下气相体积分布云图Fig.6 Contours of vapor volume fraction under different nozzle inlet pressure

图7 不同水深条件下气相体积分布云图Fig.7 Contours of vapor volume fraction under different water depth
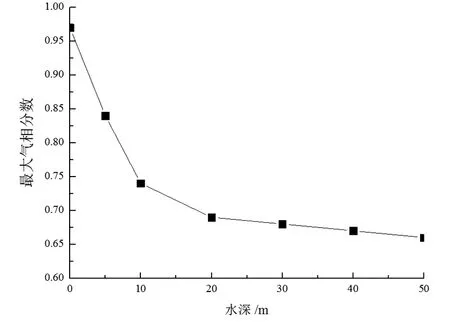
图8 气相体积分布随水深变化曲线Fig.8 Curve of vapor volume fraction with water depth
5 结论
空化射流速度以及空化程度随压力增大而明显增大,轴向流速随着轴向距离的增加而不断衰减,但水深的增加会削弱空化程度,降低清洗效率。在实际工程应用中,为了产生较好的空化效果,提高清洗效率,可通过改变系统泵压、喷嘴几何参数、喷嘴数量与布置方式、清洗靶距等因素来提高清洗效率。
□
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
新农村(浙江)(2022年5期)2022-05-19
火箭推进(2022年2期)2022-05-14
渔业现代化(2022年1期)2022-03-10
山东建筑大学学报(2022年1期)2022-03-02
商品与质量(2021年43期)2022-01-18
湖南农业(2021年11期)2022-01-09
陶瓷学报(2021年4期)2021-10-14
食品安全导刊(2021年21期)2021-08-30