多功能婴儿车设计研究
2020-11-06 05:17陈武略田春来
萍乡学院学报 2020年3期
彭 程,陈武略,田春来
多功能婴儿车设计研究
彭 程,陈武略,田春来
(萍乡学院 机械电子工程学院,江西 萍乡 337000)
在传统婴儿车的基础上设计了一种新型的多功能婴儿车,介绍了多功能婴儿车主要零部件的设计过程。设计主要包括可升降车轮、连杆式履带、转轴和平衡哄睡装置,通过这些机械结构的相互配合可完成上下楼梯、辅助学步、紧急制动和哄睡等动作。利用有限元分析软件计算获得底盘最大极限载荷响应情况,最大应力是2.1 MPa,满足强度要求,各项设计能够保证产品可靠性和紧凑度。
多功能婴儿车;服务机器人;有限元分析;上下楼梯;机械结构
引言
随着国家二孩政策的推进实施,家庭对于婴儿用品、辅助器械及育婴服务的需求越来越大。同时,随着社会迅速发展和科技不断进步,越来越多高科技的服务型自动化装置或机器人产品出现在人们的视野当中,各类生活服务型机器人设计不断涌现。婴儿护理机器人就是一种新颖的生活服务机器人[1~3]。
目前市场上出现了多种婴儿护理和看护服务型机器人。这些机器人大多数功能单一,辅助学步和看护哄睡等关键功能尚未结合在一起,在运动时仅仅考虑了平面空间,在自由上下楼梯及紧急制动方面需要完善[4~7]。本次研究的多功能婴儿车针对以上的问题,将常用功能有效整合在一起,通过履带传动的方式解决了上下楼梯的问题,同时通过底盘、车轮的巧妙设计将哄睡和学步功能结合在了一起。本设计使用三维CAD软件完成了数字化样机设计,并借助运动仿真模块进行了运动仿真,完成了整机结构设计的校核和运动分析。
1 整体概要设计
多功能婴儿车整体设计尺寸以市场上现有的手推婴儿车尺寸为参考,整机长2000 mm,宽836 mm,高1000 mm,在有限的家庭空间里具有较高的机动性。机器人整体结构紧凑,其主要有可升降车轮、上下楼梯模块、底盘、抱死制动模块、平衡哄睡模块等结构。根据需求设定可以提供的服务主要有儿童哄睡、儿童学步、外出时作为婴儿车可上下楼梯等。
多功能婴儿车由上下楼梯模块、平衡哄睡模块、运动模块、底盘及可升降车轮组成。装置结构树状图如图1所示。

图1 结构树状图
设计将上下楼梯、辅助哄睡和辅助学步这三项功能结合集成在一起。行驶装置方面采用了可升降车轮,在进行上下楼梯动作时婴儿车的车轮和与其相连接的连杆式履带开始运动,并且在运动过程中保持连杆式履带与台阶相切从而完成上下楼梯的动作。在进行辅助哄睡和学步动作时通过平衡装置和可升降车轮相互配合,从而顺利完成这两个动作的执行。从整体来看婴儿车由婴儿车外壳、平衡装置、连杆式履带和可升降车轮构成:婴儿车外壳用于保护主体机构和婴儿床;平衡装置用于平衡哄睡和保持床身稳定;连杆式履带用于上下楼梯和紧急制动;可升降车轮既可作为动力来源也可用于降低车身高度。机械结构简图如图2所示。
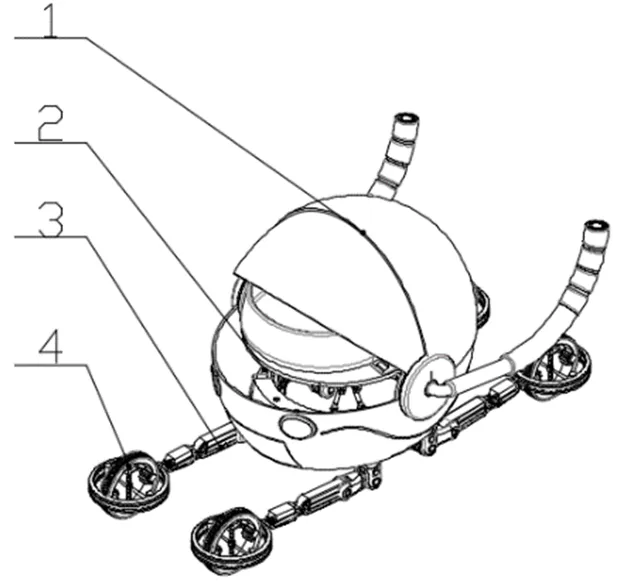
1—婴儿车外壳;2—平衡装置;3—连杆式履带;4—可升降车轮。
2 详细结构设计
2.1 运动模块结构设计
运动模块由安装在与底盘相连接的可升降的车轮提供动力。可升降车轮由橡胶轮胎、同轴旋转结构、齿轮传动装置、丝杠传动装置、弹簧减震系统构成:同轴旋转结构用于车轮的转向;齿轮传动装置通过内齿轮传动来带动车轮运动;丝杠传动装置用来降低车身高度;弹簧减震系统用来减缓车身的抖动。每个车轮都采用了内置电机带动齿轮的方式来带动车轮运动,同时可以根据车轮中的丝杠传动机构来完成升降和转向。车轮在陆地的承重面采用橡胶材质,凹凸的纹路车轮增强其在地面的抓地力,防止打滑。在进行外出行驶这个动作时,车轮两端的弹簧减震系统能够大大地降低行驶过程中的颠簸程度,在进行上下楼梯这个动作时,车轮中的丝杠传动机构能够降低车身的高度,使连杆式履带与台阶很好地接触,从而平稳地完成上下楼梯这个动作。在进行学步这个功能时,婴儿车能够通过车轮中的丝杠传动机构降低车身高度从而能够让婴儿去进行学步。车轮机构简图如图3所示。

1—橡胶轮胎;2—同轴旋转结构;3—齿轮传动装置;4—丝杠传动装置;5—弹簧减震系统。
2.2 上下楼模块结构设计
上下楼梯模块中包含了可升降车轮、连杆式履带、抱死制动装置、转轴。可升降车轮在该模块中主要用来降低车身的整体高度,通过连接块与连杆式履带连接,同时配合连杆式履带来完成上下楼梯的动作。
连杆式履带为上下楼梯模块中的核心装置,由连接块连接的大小两个履带组成。当婴儿车进行上下楼梯的动作时,小履带上的内置电机通过两履带的连接点抬高小履带来适应台阶的高度,使其与台阶相接触。同时,内置电机带动小履带转动进行上下楼梯这个动作也减轻了看护人员劳动量。
抱死制动装置的作用在于能够在婴儿学步遇到车轮突然悬空时可作为紧急刹车带,同时还能够在出行时作为刹车装置。在进行刹车动作时,小履带上的锥齿轮螺纹杆传动装置能够通过锥齿轮的转动,来带动螺纹杆上的刹车块完成张开和夹紧的动作,从而起到紧急制动和刹车的作用。这样既解决了学步和上下楼梯的安全问题,也将这几个功能紧密的结合到了一起。
转轴是连杆式履带和婴儿车底座的连接点,它能够让车身与上下楼装置连接的更加紧凑,同时转轴还能调节履带与车身的角度,这样婴儿车就能够适应更多的路段。其工作原理为通过内置电机带动齿轮传动部分来调节车身与地面的高度,当相邻两对连杆式履带的角度需要调节时,能够通过内置电机带动转轴顶部的轴承旋转来达到。上下楼梯的机构简图如图4所示。
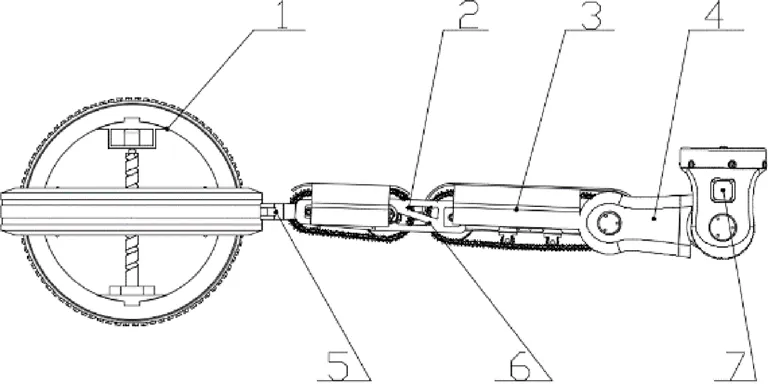
1—可升降车轮;2—抱死制动装置;3—连杆式履带;4—转轴;5—连接块;6—连接板;7—电机。
2.3 平衡哄睡模块结构设计
平衡哄睡模块结构采用一种空间六连杆机构对放置婴儿床的平台进行支撑。按照三脚架的方式进行安装使得机构的平稳性得到了极大的提升。同时采用了圆环顶盘结构,极大地利用了有效空间,从而避免婴儿车因为机构的问题变得庞大。在进行哄睡动作时,由电机带动六连杆机构进行平稳的摆动,从而带动婴儿床摆动,以达到哄睡的效果。在外出行驶和上下楼梯时,为保持婴儿床始终处于水平的状态,平衡装置会根据车身的倾斜程度来调整连杆摆动的角度,因为采用的是空间六连杆机构,所以能够极大的保证平稳性和舒适度。在进行学步这个动作时,通过可拆卸式连接支架将婴儿床转换成学步装置,同时通过车轮来降低车身的高度,进而也就完成了学步动作。结构简图如图5所示。

1—连接支架;2—圆环顶盘;3—六连杆机构;4—电机;5—底盘。
3 婴儿车整机外壳
外壳采用了可爱式头盔造型这既增强了防护强度,又让婴儿车外形更加的美观。外壳在手柄这个部分采用了竹节式海绵进行包裹,让青年父母推车的时候不会发生打滑的现象。外壳还设置了一个四分之一圆的可开合式的玻璃罩,在外出时,既能够为宝宝阻挡灰尘和紫外线,也能让父母或看护人员随时观察到宝宝的动态。如图6所示。

1—玻璃罩;2—手柄。
4 关键零部件强度校核
4.1 底盘有限元分析建模
我们在有限元分析软件中建立箱体模型,并进行有限元网格划分、材料定义。箱体网格模型如图7所示。
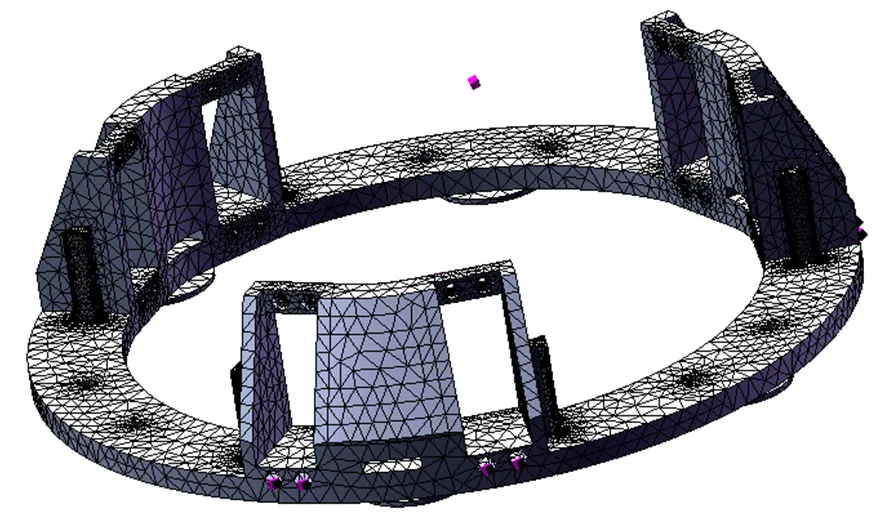
图7 底盘有限元网格模型
4.2 施加载荷
在有限元软件中依次施加约束条件和载荷,设定边界条件为底盘施加全位移固定约束。由于底盘所承受的载荷主要是由床体和六连杆的运动引起的,当婴儿车正常行驶时,床体和六连杆对底盘的作用力是持续性作用力,故在底盘上施加一个持续性作用力。
4.3 计算结果分析
通过计算我们获得底盘应力、应变图,如图8所示。从图中我们可以知道,底盘结构最大应力是2.1 MPa,对比底盘材料屈服应力20 MPa,所设计结构强度能够满足要求,底盘结构稳定。
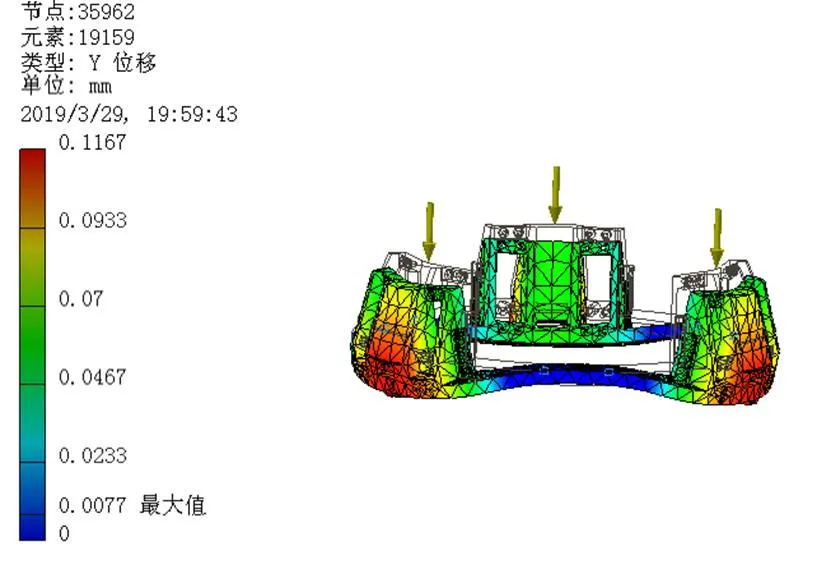
图8 底盘变形云图
结语
根据当前婴儿看护特别是婴儿车多能集成化需求,设计了一种新型的多功能婴儿车。该婴儿车具有 辅助上下楼梯、辅助婴儿站立学步和协助婴儿哄睡的功能。整机外观新颖,机械机构灵巧,整机尺寸紧凑,结构强度和运行过程基本可靠,具有一定的产品推广价值。后续将进一步对机械结构进行优化,降低车轮和平衡装置及整机成本,提高产品性价比和市场竞争力。
[1] 康辉, 张天懿. 整合式多功能婴儿车创新设计[J]. 工业设计, 2018(10): 44~45.
[2] 王雪飞, 苟锐. 多功能婴儿车的可持续应用设计[J]. 工业设计, 2016(9): 106~107.
[3] 陈伟超. 基于人机工程的婴儿车的创新性探究[J]. 机电工程技术, 2016, 45(8): 136~138.
[4] 孙慧敏. 多功能整合式婴儿车的创新设计与研究[J]. 设计, 2015(15): 31~33.
[5] 张稳, 娄天祥, 唐昌松. 多功能婴儿车的创新设计[J]. 装备制造技术, 2015(3): 210~211.
[6] 马广韬, 周铎. 浅析婴儿车的人性化设计[J]. 设计, 2015(4): 26~27.
[7] 杨军艺. 新型智能婴儿车的原理及设计[J]. 机械工程与自动化, 2011(6): 183~184+186.
Research on the Design of Multi-functional Stroller
PENG Cheng, CHEN Wu-lve, TIAN Chun-lai
(School of Mechanical and Electronic Engineering, Pingxiang University, Pingxiang Jiangxi 337000, China)
A new multi-functional stroller is presented on the basis of traditional design. The design process of the main components, such as lifting wheel, connecting rod crawler, swivel and soothing rocking device, is introduced. Through the integration of these mechanical structures, the stroller is able to go up and down stairs, assist toddlers, put on emergency braking, and soothe the baby to sleep. Finite element analysis software is used to calculate the maximum load response of the chassis. The maximal stress is 2.1 MPa, which meets the strength requirements and ensures the reliability and compactness of the design.
multi-functional stroller; service robot; finite element analysis; up and down stairs; mechanical structure
2020-06-04
国家级大学生创新创业训练计划项目(201910895003)
彭程(1999—),男,江西吉安人,萍乡学院2017级机械设计制造及其自动化专业本科生。
田春来(1985—),男,河北石家庄人,高级工程师,副教授,研究方向:机械工程现代设计及理论,Email: tcl0510@163.com。
TP273
A
2095-9249(2020)03-0107-04
〔责任编校:吴侃民〕
猜你喜欢
民间故事选刊(2022年15期)2022-08-24
心理学报(2022年7期)2022-07-09
疯狂英语·新读写(2021年10期)2021-12-07
兵器装备工程学报(2021年3期)2021-04-09
学生天地·小学低年级版(2018年5期)2018-09-13
创新作文(1-2年级)(2017年11期)2018-04-17
躬耕(2017年11期)2017-12-01
中学科技(2015年7期)2015-07-03
环球时报(2009-05-08)2009-05-08
意林(2008年22期)2008-05-14