
基于机器学习的航空器进近飞行时间预测
2020-11-06 06:44:52叶博嘉鲍序刘博田勇
航空学报 2020年10期
叶博嘉,鲍序,刘博,田勇
1.南京航空航天大学 民航学院,南京 211106 2.中国民航华东空管局江苏空管分局,南京 211100
随着航空运输业持续高速发展,民航飞行对空域需求与日俱增,空域紧张的局面已然呈现由点到面的发展趋势。进近(终端)管制区作为最为繁忙的空域类型,空中交通流量日趋饱和,管制员调配难度和工作负荷急剧增加,由此引发的飞行延误以及冲突问题日益严峻[1]。为有效缓解空中交通拥堵态势,中国民航业界对进近管制区空域和交通流的运行优化展开了深入研究[2-6],航空器进近飞行时间预测则是相关研究的重要基础。
航空器进近飞行时间是指航空器在机场附近完成高度、速度和构型调整直至降落所需的时间。从研究角度,进近飞行时间是进离场管理、冲突探测与解脱和终端区流量管理等问题的重要依托,如果缺乏准确的预测,则难以保障调配和优化方案的安全性和有效性。实际运行中,进近飞行时间是管制员为进场航空器进行汇聚排序、冲突解脱、安排落地次序的基本依据,如果缺乏准确预判,管制员需根据航班动态持续修正航班进近次序,不仅增加了管制工作负荷,还会影响航班地面滑行、引导和停机位分配等后续人员及车辆保障工作。因此,准确预测航空器的进近时间不仅有助于提高进近管制区的运行效率,降低管制员工作负荷,还能为机场和航空公司在航班落地后的工作提供精确指导,具有重要的研究价值和应用前景。
国内外学者关于航空器飞行时间预测的研究一直非常关注,现有方法大体可分为2类:行为建模方法和数据驱动方法。
行为建模方法旨在通过对航空器飞行轨迹建模,仿真航空器的状态和飞行过程,预测航空器的进近飞行时间。飞机制造商发布性能软件,如:波音的BPS(Boeing Production System)和空客PEP (Performance Engineer’s Program)等是建模最佳工具,但软件模型复杂、参数繁多且存在商业保密问题。因此,Roy等[7]则提出一种随机混合线性系统框架,建立包括:航空器位置、速度和加速度的连续状态,直线、转弯飞行离散状态的系统,并采用混合状态评估方法IMM(Interacting Multiple Model)进行求解,预测航空器进近飞行时间。Konyak[8]和Yepes[9]等将航空器意图信息引入研究,提出动态更新航空器的起始下降点和侧向转弯信息,以改进预测的准确性。Zhang等[10]则融合在线的ADS-B (Automatic Dependent Surveillance-Broadcast)信息,以增加模型预测准确性。Lee等[11]则融合飞行计划和程序,提出改进随机混合系统,采用状态相关的混合评估算法,求解模型并改进预测结果。随着未来机载设备的升级,航空器与地面信息的交互能力不断增强,实时数据有助于进一步提升航空器行为模型的预测精度。然而,在预测航空器进近飞行时间方面,行为模型并不关注航空器意图变更原因,模型难以融合空域动态变化信息、交通态势、管制因素、驾驶员行为等诸多运行要素。而实际运行中,进近空域是航空器汇聚和发散的密集空域,管制员需对进离场航空器飞行进行频繁调整,解脱潜在冲突、安排汇聚和着陆次序,对航空器进近飞行时间会产生较大影响。因此,数据驱动的航空器进近飞行时间预测方法逐渐引起诸多关注。
数据驱动的方法是近些年较为流行的方法,其本质是通过采用数据挖掘、统计分析和机器学习等方法,基于样本数据建立、训练并验证关键特征与预测值的数学模型,以预测航空器的进近飞行时间。Leege等[12]引入了广义线性模型,在固定进场路线上预测15海里至45海里范围内的航空器轨迹和飞行时间,模型考虑的因素包括:机型、速度、高度和风速信息。Tastambekov等[13]基于航空器历史雷达运行数据,采用小波分解的方法建立线性回归模型,预测航空器在10~30分钟期间的运行轨迹。Hong和Lee[14]以前序航班轨迹为先验数据建立贝叶斯概率模型,预测在管制员实施雷达引导时,航空器在终端区的飞行轨迹和时间。Kim[15]则考虑了离场时间、空中飞行时间、航空公司和天气和季节因素。Wang等[16]基于ADS-B数据对航空器历史运行航迹进行聚类和降维,采用基于多单元神经网络方法建立回归模型,预测进近航空器的四维航迹和飞行时间。Barratt等[17]对基于雷达点数据对航空器历史航迹进行重组和聚类,重新生成航空器的航迹信息,并采用高斯混合模型预测航空器的进近飞行时间。
上述研究主要从航空历史运行数据出发,试图构建航空器初始进场状态与典型航空器飞行轨迹的关联,再根据预计的轨迹预测航空器预测进近飞行时间,部分研究引入了对航空器行为、管制因素和高空风等因素的考虑,但对造成进近空域飞行时间差异的诸多原因缺乏全面、系统的分析,预测模型的泛化能力也存在瓶颈。
本文旨在从分析影响进近飞行时间的主要因素出发,以准确预测航空器进近飞行时间为目标,综合考虑航空公司因素、航空器类型、进场状态、繁忙程度、运行模式、天气情况、空域因素和管制因素,提取重要特征并与航空器飞行时间直接关联,建立基于机器学习的进近飞行时间预测模型。研究从一线管制单位采集实际运行数据,以南京进近为实例展开了实例分析,分别建立了基于岭回归、支持向量机、随机森林和神经网络的机器学习模型,以调整决定系数、均方误差、平均绝对值误差为指标,训练、验证了模型的准确性和精度,并对模型中重要的特征和影响因素展开分析。
1 问题描述
在进近管制空域,航空器通常按照仪表进近程序(Instrument Approach Procedure,IAP)飞行,即对障碍物保持规定的安全超障余度,参照飞行仪表所进行的一系列预定的机动飞行[18]。仪表进近程序一般包括5个单独的航段,分别是进场、起始进近、中间进近、最后进近和复飞航段[19],如图1所示。其中,进场航段指航空器从航路一点至起始进近定位点之间的飞行路线,旨在下降飞行高度、降低航空器速度以完成从航路飞行到进近飞行的过渡。起始进近、中间进近和最后进近指航空器逐步完成飞行外形、位置、速度和高度的调整,直至对准跑道完成着陆的航段。复飞航段则是指航空器在无法完成进近时所遵循的飞行程序,通过改变形态、爬升高度以重新加入航线或开始另一次进近。

图1 进近飞行示意图Fig.1 Aircraft approach procedure
实际运行中,进近管制员为防止航空器与航空器、航空器与地面障碍物相撞,在收到进场航空器进入进近管制空域的位置报告后,向驾驶员通报空中有关飞行活动和飞行情报,指示其按照标准仪表进场程序飞行或采用雷达引导的方式,指示航空器按照某一具体的“航向、速度、高度”飞行,调配飞行冲突、安排落地次序、配备落地间隔,并在中间进近或最后进近阶段将航空器移交给塔台管制员。塔台管制员根据机场场面运行情况发布落地许可或复飞指令,依次安排航空器落地。总的来说,航空器在进近飞行过程中,会受到诸多内部与外部因素的影响。内部因素包括航空器的性能(机型)、飞行员操作经验等;外部因素包括所使用进场航线、跑道结构、运行模式、天气情况和管制员经验等。
本研究旨在与实际管制工作紧密结合,综合考虑航空器在进近管制区飞行时的航空公司因素、航空器类型、进场状态、繁忙程度、运行模式、天气情况、空域因素和管制因素,预测航空器在进近管制区内的飞行时间,即从航空器到达进场点开始到航空器落地时的飞行时长。本研究将该实际问题可转换为机器学习中的有监督学习问题,旨在建立重要影响因素与航空器进场飞行时间的函数关系。研究关键包括:采集并处理与进近飞行相关的重要数据,准确分析影响进近飞行的关键因素,提取出建模所需重要的特征,建立并训练出具备良好预测能力的机器学习模型。
2 特征提取
2.1 数据采集与分析
本研究所采集的原始数据分为航行资料汇编数据(Aeronautical Information Publication,AIP)、航班运行数据、气象数据和管制班组数据4大类。其中,航行资料汇编数据包括标准仪表进场航线图、仪表进近图、机场图等,来源于中国民用航空局。航班运行数据、气象数据和管制班组数据来自江苏空管分局,主要是航班在南京进近运行时的相关数据。南京进近管制区位于华东地区西部,是中国东部沿海航空运输热线的枢纽区域,是连接中国西部地区至东南沿海、华南和港澳台地区的主要航空通道。南京进近管制区现划分为4个管制扇区,主要负责包括南京禄口国际机场在内的11个机场的起降和飞越航班提供管制服务,如图2所示。本文以南京禄口国际机场到达航班为研究对象,故对红框范围内(南京进近01/02/03扇区)的进近航班展开研究。

图2 南京进近区域范围Fig.2 Area of Nanjing approach
根据航行资料汇编数据,南京禄口国际机场的航班进出口主要有4个方向,本文分别用A、B、C、D分别表示,如图3所示。其中,2种最常使用的进场模式为:向东运行模式(07号跑道落地、06号跑道起飞)和向西运行模式(25号跑道落地、24号跑道起飞)。向东运行模式下的航空器常规路径有4种,路径相对固定的;向西运行模式下的航空器常规路径有6种,部分情况下A1和B1路径无法使用,需采用A2、B2路径进场。根据管制协议,不同运行模式下使用的跑道、进离场方式和航空器移交高度会有所不同。

图3 进场程序图Fig.3 Arrival procedure charts for Nanjing approach
航班运行数据包括航班号、机型、进场点、进场高度、进场速度、进场航线、使用跑道、进场时间和落地时间,如表1所示。其中,进场速度为单位为10 km/h,进场高度基准单位为10 m。

表1 航班运行数据Table 1 Flight operational data
气象数据包括南京进近的修正海压值、风向、风速、能见度和天气特征,如表2所示。修正海压值的变化会引起航空器实际飞行高度的变化,从而影响航空器的进近时间;风速、风向因素会影响飞机的地速;能见度因素会影响航空器间的进近排序间隔;天气特征,如小雨、雾霾、晴空和雷雨等不同天气现象影响到进场航线和空域的使用,导致进近顺序和进近时间的变化。
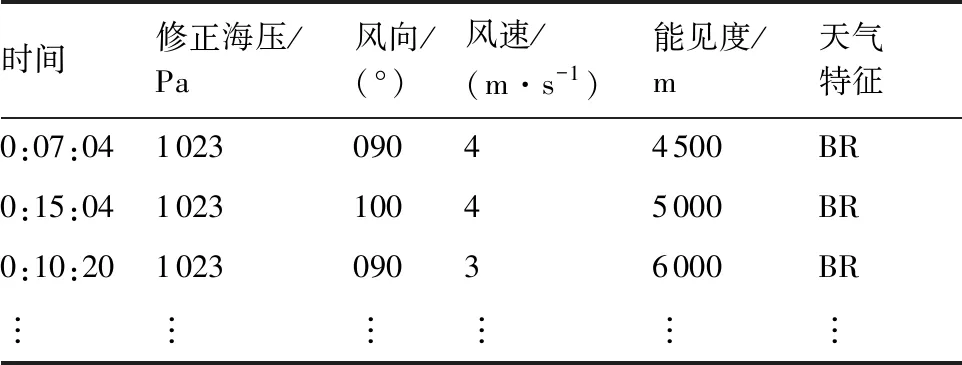
表2 气象数据Table 2 Meteorological data
其他相关数据包括:管制班组数据和可用数据。其中,管制班组数据统计了管制员的在岗值班情况,旨在将航班运行数据与管制班组相关联,以获取管制员指挥差异。可用空域信息是影响航空器在进近阶段飞行的重要因素,部分空域可用时会改变管制指挥方式,增加可用机动空域,显著改变航空器的进近时间。
2.2 影响因素分析及特征提取
基于采集到的原始数据,根据航空器在进近空域飞行特点,研究并提出了影响航空器进近飞行时间的8类因素和17个特征,并对数据进行清洗和标准化。影响进近飞行时间的8类因素包括:公司因素、航空器因素、进场状态、繁忙程度、运行模式、天气情况、空域因素和管制员因素。
其中,公司因素旨在反应飞行员操作对进近飞行的影响,提取特征为航空器所属航空公司。不同航空公司的飞行员操作手册和公司管理规定会有所差异,因此不同公司的驾驶员会采用不同的调速时机和下降率,进而影响进近飞行时间。
航空器因素旨在反应不同类型航空器在进近飞行阶段性能的差异,提取特征为:航空器机型。不同机型在飞机载重、最小光洁速度等性能参数上可能存在差异,可能会在飞行能力方面影响进近飞行时间。
繁忙程度旨在获取进近空域中同时服务航空器的数量信息,提取特征包括:进场航班数量和离场航班数量。当进近空域存在多架航空器时,管制员需向航空器依次发送包括速度调整、高度调整和飞行路线调整在内的多种管制指令,以调整航空器间潜在冲突、保持安全间隔、按照指定顺序依次降落。
运行模式可能影响进近飞行的路线和总距离,提取特征包括:航空器进场时所使用标准进场航线和降落时使用的跑道。
天气情况可影响航空器的飞行性能、飞行路径和排序间隔,提取特征包括:修正海压值、风速、风向、能见度和天气特征。
空域因素旨在反应当部分进近空域不可用时对航空器进近飞行的影响,提取特征为:空域受限类型。通常在进近空域内存在部分空域受限,此时管制员无法引导航空器在空域内灵活飞行,进而会影响其飞行路线和运行效率。
管制员因素旨在获取管制员值班状态、指挥技能、管制协同等一系列复杂的、难以量化的管制能力,提取特征为:管制班组。日常值班中,管制班组成员相对固定,不同班组间的值班习惯相对稳定,因此可用班组来分析管制员因素。研究分析出的主要影响因素及提取特征如表3所示。
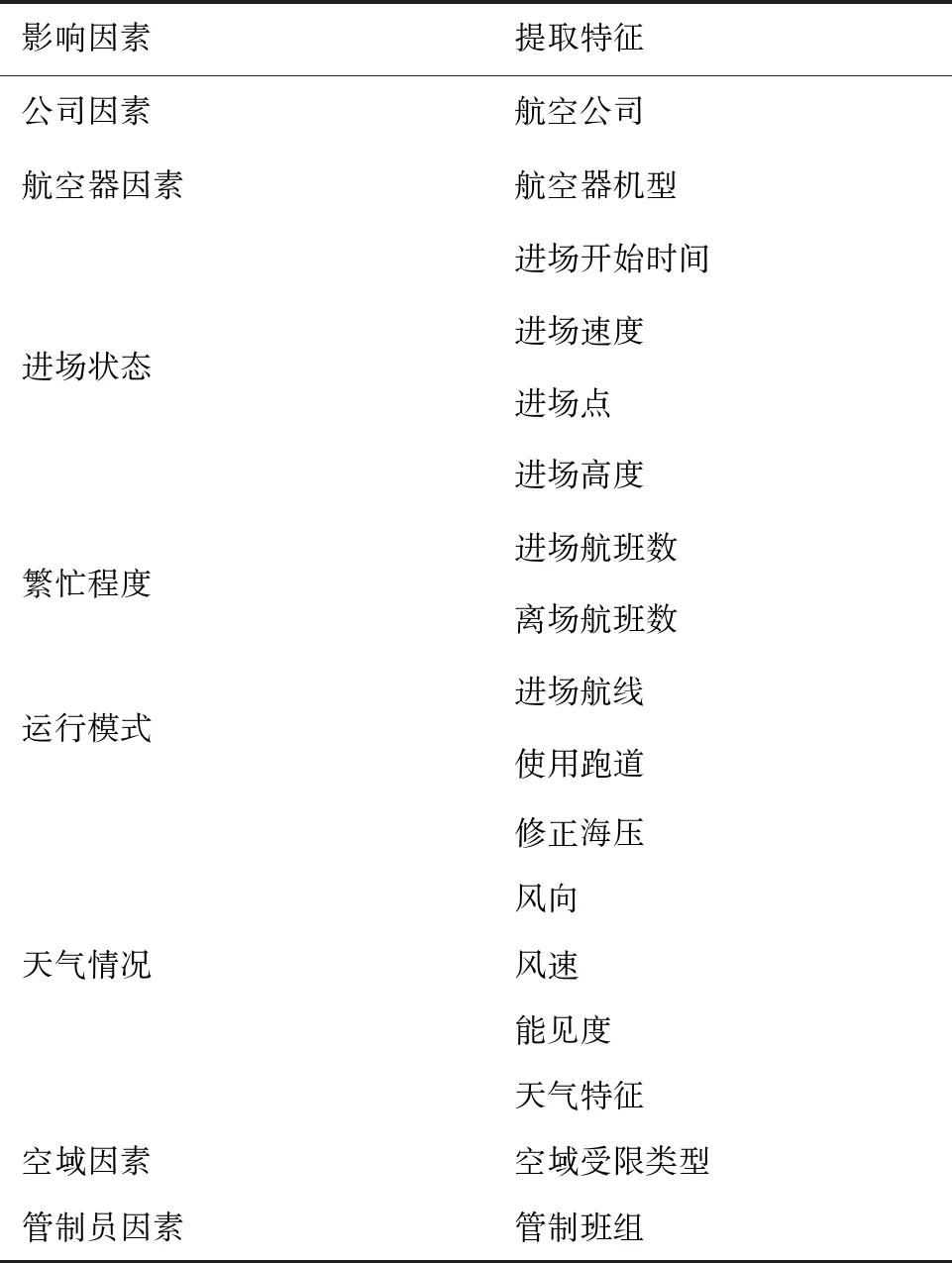
表3 影响因素与提取特征Table 3 Influencing factors and characteristics
从原始数据中提取研究所需特征,分为:定量和定性2种类型。其中,航空公司、机型、进场点、进场航线、使用跑道、风向、天气特征、空域受限类型为定性数据,需对其进行编码并换为定量表示。表4为对航空公司、机型和天气情况进行的编码示意图,包括:在南京禄口国际机场运营的43家航空公司和17种机型,以及轻雾、晴空、无云、中雨、中雨轻雾5种常见天气情况。

表4 数据编码表Table 4 Data encoding table
进场开始时间、进场速度、进场高度、进场航班数、离场航班数、风速、能见度、空域受限类型、管制班组等为定量数据,但需对其进行清洗和标准化,以防止不同的量纲和量纲单位对算法性能的影响。本文采用标准化的方法对各个特征进行转换,如式(1)所示。
2.2 病原菌排位 2012-2016年病原菌的排位中,居前三位的革兰阴性菌依次是大肠埃希菌、肺炎克雷伯菌、鲍曼不动杆菌;居前三位的革兰阳性菌依次是金黄色萄萄球菌、凝固酶阴性葡萄球菌、肠球菌,这六种菌占检出菌的38.01%;真菌以白色念珠菌最常见,占检出真菌的55.10%;具体见表2。
(1)

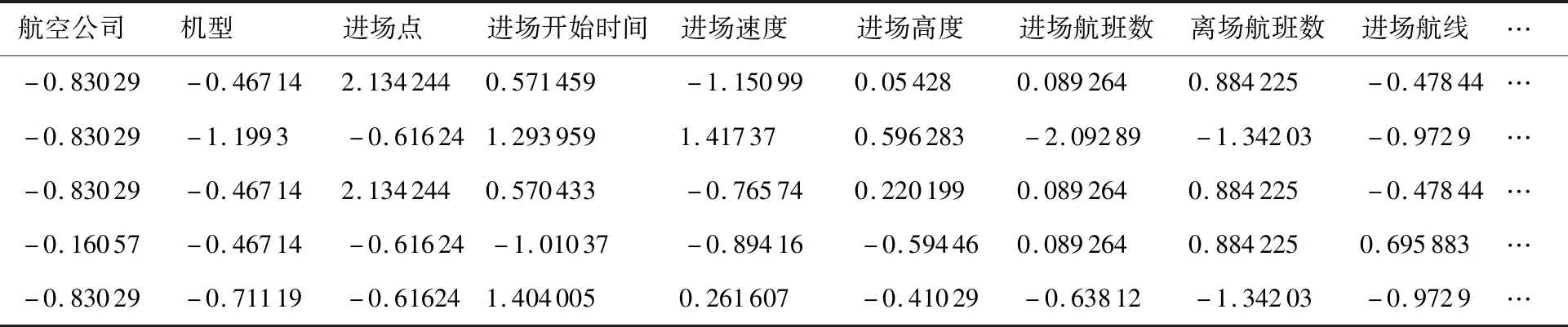
表5 数据的机器学习格式Table 5 Machine learning format of data
3 模型建立
本节将进近飞行时间预测问题转换为机器学习中的有监督学习问题,拟基于岭回归、支持向量机、随机森林和神经网络4种机器学习算法,建立航空器进近飞行时间预测模型,用以测试和分析各种模型的预测精度和效果。
将提取的进近飞行特征与实际进近飞行时间相关联,组成机器学习建模所需的数据集并进行划分,进近飞行特征为2.2节提出的8类因素和17个特征。其中,航空器实际进近飞行时间,是指航空器从进入进近空域的进场点开始到航空器落地时经过的飞行时间。根据实际运行需求,本文采用分钟作为航空器飞行时间的最小度量单位,将航空器落地时间与进场时间相减并转化为非整数分钟作为数据标签,并选择岭回归、支持向量机、随机森林和神经网络4种流行的算法进行机器学习建模,算法主要内容如下:
岭回归是一种可解决多重共线问题的线性回归算法,其本质是一种改良的最小二乘估计法,以损失部分信息、降低精度为代价获得回归系数更为符合实际、更可靠的结果,常用于建立具有大量参数的线性模型[20]。在使用岭回归进行建模时,目标函数可表示为
(2)

(3)
式中:I为单位矩阵;λ作为参数可用以平衡模型的方差和偏差。在模型优化过程中,可通过优化拉格朗日乘子λ和求解器算法等来改进模型预测结果。
支持向量机(SVM)是一种非常流行的监督学习方法,可用于分类问题和回归问题,具有良好的泛化能力,可嵌入更高维度的空间,在灵活表示复杂函数的同时可以抵抗过度拟合。支持向量机回归是由Cortes和Vapnik提出[21],算法通过构造极大边距分离器、生成线性分离超平面、采用非参数方法建立回归模型。支持向量机的基本理念是考虑一个n维欧式空间中的超平面(线性函数),如式(4)所示:
〈w,x〉+b=0
(4)

(5)
约束条件为
(6)

随机森林一种鲁棒并且实用的决策树学习方法,通过训练多个弱模型(决策树)来组成一个强模型,属于一种集成的机器学习方法[22]。在训练阶段,随机森林采用bootstrap采样方法从训练集中采集不同子集来训练多个不同决策树;在预测阶段,随机森林将内部多个决策树的预测结果取平均作为最终结果。
以二叉决策树为弱模型为例,在训练阶模型的时候需要考虑怎样切分变量(特征)和切分点,以及怎样衡量一个切分变量和切分点的好坏。其中,针对切分变量和切分点的好坏,一般以切分后节点的不纯度来衡量,即各个子节点不纯度的加权和G(xl,vlk),计算公式为
(7)
式中:xl为切分向量的一个特征;vlk为切分变量的一个切分值;nleft、nright和Ns分别为切分后左子节点的训练样本个数、右子节点的训练样本个数以及当前阶段所有训练样本个数;Xleft、Xright分为左右子节点的训练样本集合;H(X)为衡量节点不纯度的函数,常用的回归不纯度函数包括平方平均误差(MSE)和绝对平均误差(MAE)。MSE计算方法是求预测值与实际值之间距离的平方和,其数值越小则表明模型的预测精度越高。MAE旨在测量预测值和实际值之差的绝对值之和,能更好的反应实际问题预测结果的好坏。MSE和MAE计算方法如式(8)和式(9)所示:
(8)
(9)

(10)
在基于随机森林算法的模型优化中,可调整的主要参数包括:决策树的最大深度、特征值数量、叶子树的最大样本数、叶子节点样本数、决策树的个数等。
神经网络是一种模仿动物神经网络行为特征,进行分布式并行信息处理的数学模型,也是一类常见和有效的机器学习系统[23]。神经网络具有很强的非线性映射、自适应、容错性和泛化能力,其基本结构由非线性变化单元组成,包括:输入层、隐含层和输出层。以xi表示特征向量样本,神经网络输出可表示为
(11)
式中:M和N分别为隐含层和输入层节点数;wji和bi为从输入层到隐含层的权重系数和偏置;aj和c为从隐含层到输出层的权重系数和偏置;fj表示激活函数,通常采用连续、光滑且处处可导的sigmoid函数。为最小化预测模型结果的误差,以yi表示样本观察值,基于神经网络的机器学习模型可转化为最小均方误差问题,
(12)
其中,激活函数对算法收敛的速度和效果有显著影响,在设定激活函数后我们可以通过改变运算器、隐藏神经网络层数和最大迭代次数的设定来改进模型预测结果。
4 实例分析
本文采集的数据为2019年3月份到达南京禄口国际机场的进近航班数据,采用分时段的方式从雷达管制自动化系统中采集,共计3 015条。在数据实际采集过程中,航空器经过进场点的位置通常会有偏差,本研究采用在进场点划设等时线的方法,统一了航空器达到进场点时间的计算方式,并剔除了少部分明显无法判定进场点的特情航班[13]。同时,为防止落地时间统计错误,本研究对航空器距离落地点10 km处的时间也进行记录,方便后续对数据正确性的校验和修正[14]。
4.1 性能指标选取
为保证所建模型可以无偏的预测航空器进近飞行时间,本实例将采集到的数据集合划分为:训练集、验证集和测试集3类。其中,训练集用以训练机器学习模型的参数,验证集用于无偏的评估模型效率和调节超参数,测试集用以测试最终的模型性能。本实验的数据集合的划分方式如图4所示:随机划设20%原始数据为测试集,如灰色所示;剩余的数据采用10-折交叉验证的方法,90%为训练集(浅灰色部分),10%为验证集(蓝色部分)。其中,随机森林采用集成学习的装袋(Bagging)模型,以100棵决策树为模型构建Bagging集成,通过从原始训练集中有放回的随机重复采样,并每次从原始特征集的29个特征中随机抽取20个特征进行模型的训练。

图4 本文数据集划分方式Fig.4 Dataset division method in this study
实验结果首先采用调整决定系数(AdjustedR2)来衡量各模型的回归效果是否显著。通常,决定系数(R2)值可用于评估回归模型拟合效果,其定义为回归平方和与总离差平方和的比值。该值越大则表示模型越精确,回归效果越显著。然而,R2值会随着模型特征增加而增加,且与样本量也有一定关系,进而造成拟合度的虚假提升。因此,本文采用调整决定系数来衡量拟合效果,该值介于0~1之间,越接近1,回归拟合效果越好,一般认为超过度0.8的模型拟合优度比较高。R2的计算方法为
(13)
AdjustedR2值的计算方法为
(14)
4.2 性能指标分析
本实验采用网格搜索方法实现超参数优化,不同模型在验证集与测试集上的调整决定系如表6 所示。总体来说,测试集与验证集的调整决定系数值相近,即表明模型的泛化能力较好。根据测试集实验结果,基于随机森林预测模型的调整决定系数为最高值0.991 2,模型的精确度高,回归效果越显著。基于岭回归的预测模型的调整决定系数为最低值0.516 6,模型的精度较低,回归效果较差。支持向量机和神经网络模型的精度和回归效果总体也较好,调整决定系数分别为0.984 4 和0.979 6。

表6 不同模型在验证集与测试集上的调整决定系数R2Table 6 Adjusted R2 score of different models on validation set and test set
表7显示了4种模型的MSE和MAE值。其中,基于随机森林的预测模型的结果最好,MSE和MAE值同为最低,分别为0.07和0.18 min。岭回归效果最差,MSE和MAE值分别为4.11与1.54 min。支持向量机和神经网络的预测效果也较好,但损失函数均略高于基于随机森林的模型。该表同时表明,基于本文提出特征建立的预测模型,最优模型的平均预测偏差为0.18 min(10.8 s)。与现有理论和实际指标比较,南京进近管制自动化系统3月份实际预测偏差为1.8 min(108 s);基于行为驱动的方法,在不考虑飞行意图变化的情况下,最小预测偏差为11.33 s[10],而现有基于数据驱动的方法较小预测偏差分别为106.8 s和135.62 s[12-16]。

表7 不同模型的预测性能Table 7 Prediction performance of different models
图5为4种算法在测试集上误差绝对值的累计分布情况。由图可见,随机森林模型累积分布曲线(绿色)上升最为陡峭,表明该模型的误差绝对值整体较小。支持向量机模型的累积分布曲线(黄色)上升陡峭度略低,表明其误差绝对值整体大于随机森林模型;然而,需要关注的是支持向量机模型误差绝对值的最小值比随机森林模型的更小,体现了其在预测最差情况下具有一定优势。神经网络模型的误差绝对值分布与支持向量机模型相近,但误差绝对值的最大值在2 min以上。岭回归的误差绝对值分布最为分散,最大误差值在8 min以上,说明该预测模型的鲁棒性较差。图6以实际进近时间样本数据为横坐标,观察误差绝对值的分布情况。由图可见,岭回归模型预测误差绝对值整体都较大,神经网络模型在实际进近时间为17~20 min出现部分较大误差,随机森林在15和20 min样本点出现了较大误差值,支持向量机模型整体稳定性最好。

图5 测试集上误差值的累积分布Fig.5 Cumulative distribution of errors on test set

图6 预测误差绝对值随实际进近时间的分布散点图Fig.6 Prediction error values of proposed models with actual approach time
4.3 特征及影响因素分析
本节将实验结果与实际相结合,分别对预测模型17个特征的重要程度和8类因素展开分析,旨在进一步探讨影响进近飞行时间的内在原因。
图7以预测性能最好的基于随机森林的进近飞行时间预测模型为基础,对提出特征重要度展开分析。其中,特征重要度以Gini系数进行衡量,取值为0~1之间,数值越大表明该特征对预测结果贡献程度越大。由图10可见,进场点是最为重要的特征,特征重要度在0.2以上,该特征属于航空器进场状态因素,与进近飞行的水平距离与较大关系。进场高度和进场航班数是特征重要度在0.1~0.2之间的2个特征,与进近飞行需要下降的高度和管制员需同时指挥进近的航空器数量有关。进场开始时间和风速是排序第4和第5重要的特征,特征重要度在0.05~0.1之间,表明进近飞行时间可能存在繁忙时段,且风速对飞行还是存在明显影响。另外,值得关注的是管制班组特征,该特征重要度是17个特征中最小的,表明管制班组间差异性并不明显,这应该与管制员长期严格与专业的训练有关。

图7 17个特征的预测特征重要度Fig.7 Prediction importance of 17 features
图8将17个特征重新并入8类影响因素,生成因素权重图以定量分析各类因素对预测结果的影响程度。由图可见,进场状态时对航空器进近飞行时间影响最大的因素,占比达到60.83%;繁忙程度、天气情况和公司因素影响也较大,占比分别为12.59%、10.58%和8.81%;航空器因素、空域因素、运行模式和管制员因素占比较小,分别为4.27%,1.49%,1.37%和0.06%。

图8 因素权重图Fig.8 Factor weight chart
结合实际进近阶段的飞行特点,对8类因素的影响程度进行分析。航空器在进入进近管制空域后,为避免与其他航空器产生冲突风险,管制员通常按照 “先到场先进近”的原则对其进行排序,依次指挥航空器调整飞行高度和速度,沿标准仪表进近程序或雷达引导路径飞行并降落。
进场状态因素中的进场点、进场高度和进场速度基本决定了航空器在进近过程中的水平、垂直飞行距离和平均飞行速度,而进场开始时间则与管制工作繁忙程度存在一定关联,进而成为影响进近飞行的最重要因素。繁忙程度因素中的进场航班和离场航班数量,是反映进近管制空域繁忙程度的重要特征,该特征决定航空器在进近过程中是否需要进行减速、排序和空中等待,是实际运行中重点关注的因素。天气情况应该通常是一个影响进近飞行的重要因素,虽然实验采集的数据为南京进近3月份的数据,天气情况相对良好,但也占据了10%以上的权重;而当雷雨、低能见度等特殊天气现象发生时,天气情况对航空器进近飞行时间的影响还应更为显著。公司因素和航空器因素主要体现在不同公司的操作规章、驾驶习惯和航空器运行性能上,由图可见这几个因素对航空器的进近时间还是有明显影响。空域因素是本次研究较为关注的问题,然而结果显示其权重远低于预期,一方面应该是因为3月份空域占用活动较为简单,基本是常规空域活动,另一方面随着中国近年来空域精细化管理的进程不断推进,常规空域活动对民航航班飞行影响正在逐渐减小。运行模式和管制员因素是权重最小的2个因素,由于南京进近中相同进场点的不同进场航线距离差距不大,管制员在管制过程中基本都遵循相同的原则,因此这2个因素对结果影响不大。
5 结 论
1) 研究航空器在进近空域飞行的实际特点,提出了影响航空器在进近空域运行的8类因素和17个特征,可以于分析航空器在进近管制空域飞行时间产生差异的原因。
2) 基于提出的17个重要特征,以航空器在进近飞行时间为标签,采用岭回归、支持向量机、随机森林和神经网络算法,建立了4种基于机器学习的航空器进近飞行时间预测模型。
3) 以南京进近为实例,对4种机器学习模型进行训练、验证和测试,对模型的性能指标、特征重要性和影响因素展开分析,模型可以为空中交通管理理论研究和实际管制指挥提供支持。
猜你喜欢
知识经济·中国直销(2018年12期)2018-12-29 12:22:48
新商务周刊(2018年15期)2018-12-06 11:01:07
证券市场红周刊(2018年22期)2018-05-14 18:45:03
证券市场红周刊(2018年26期)2018-05-14 16:47:04
航空知识(2017年2期)2017-03-17 18:17:39
西南石油大学学报(社会科学版)(2016年1期)2016-12-01 05:21:32
北京航空航天大学学报(2016年7期)2016-11-16 01:50:57
太空探索(2016年3期)2016-07-12 09:58:45
太空探索(2016年8期)2016-07-10 09:21:58
工业设计(2016年6期)2016-04-17 06:42:51
