基于个性化间距策略的自适应巡航系统模式切换策略研究*
2020-11-04 03:38邹德飚
汽车工程 2020年10期
黄 晶,韦 伟,邹德飚
(湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
前言
自适应巡航系统(ACC)是先进驾驶辅助系统(ADAS)的重要组成部分,通过环境信息感知模块进行前方行驶环境监测,以一定的控制策略使车辆以预设定车速定速巡航或自动跟随前车行驶,如速度控制模式和距离控制模式[1-3]。自适应巡航系统以其可减轻驾驶人工作负荷,有效避免碰撞,保障行驶安全和驾乘舒适[4-6]的特点被广泛研究和应用。
现有ACC控制模式的划分较为简单,一般只有巡航与跟车两种模式,适用场景单一,鲁棒性较差,模式工况适应性不强。为解决上述问题,美国密歇根大学Fancher等[7]应用相对车距-相对车速关系将ACC分为6种工况。清华大学张德兆等[8]将ACC分为定速巡航、车距保持、接近前车和超车4种模式。吉林大学严伟[9]充分考虑驾驶人的跟随行为特性,提出ACC系统5种控制模式,以及依赖于驾驶人速度跟随行为特性参数的多模式切换策略。北京理工大学裴晓飞等[10]在现有上、下位控制器的基础上增加模式切换层,通过将车辆纵向运动状态划分为8种工况,使得系统根据实际工况条件选择最优的控制模式,并采用加速度加权平均算法提高模式切换的准确性和输出连续性。
间距策略主要应用于工况划分,基于车头时距的可变间距策略目前应用广泛[11]。Ioannau等[12]认为行驶过程的车间距应和自身车速成正比。孙晓文等[13]采用基于相对速度的间距策略将模式划分为速度控制模式和车距控制模式。朱敏等[14]提出了反应时距的概念代替车头时距,认为反应时距与驾驶人设定限速、安全时距、自车速度以及目标车辆速度有关。赵健等[15]提出使用基于制动过程和基于车头时距两种间距策略用于不同工况,但间距策略并未考虑到具体制动过程以及驾驶人特性。因此针对不同工况考虑不同因素以及驾驶人风格,应灵活使用不同间距策略。
接管距离是防止碰撞发生而保持的必要车间距,对其准确度要求高。国内外对接管距离模型做了大量研究。大致可分为3类:基于车辆制动过程运动学分析的安全距离模型[16-17],基于碰撞时间的安全距离模型[18-19]和基于驾驶人特性的安全距离模型[20-21]等。但均存在安全距离模型不精准、报警精确性低、未考虑驾驶人特性等问题,因此现有模型算法仍有很大的改进空间。
基于前述研究,本文中对ACC系统工况进行重新划分,并针对不同ACC工况,采用个性化间距策略,充分考虑快速性、跟随性和舒适性,设计了各工况适用的控制方法,实现了稳定、可靠、适应驾驶人风格的工况间平滑切换。
1 模式切换策略设计
1.1 个性化的间距策略
间距策略主要应用于纵向工况,基于车间距将车辆行驶状态划分为巡航、跟车和接管工况,其对应的间距分别定义为巡航间距S0、跟车间距S2和接管间距S1,如图1所示。

图1 自适应巡航系统间距区域分布
1.1.1 巡航间距设计
基于车间时距进行巡航距离的计算,如式(1)所示。

式中:S0为最小巡航间距;Th为巡航车间时距,一般取5~8 s[9],本文中取6 s;vf为本车车速;d0为停车时两车应保持的最小安全距离,一般取2~5 m[22],本文中取2 m。
1.1.2 跟车间距设计
期望跟车间距同样由式(1)计算求得,其中车间时距一般取1.5~2 s[9]。为保障不同风格驾驶人跟车过程中的安全性和舒适性,根据驾驶人的保守、适中和激进3种驾驶风格,对车间时距进行调整,如表1所示[23-24]。
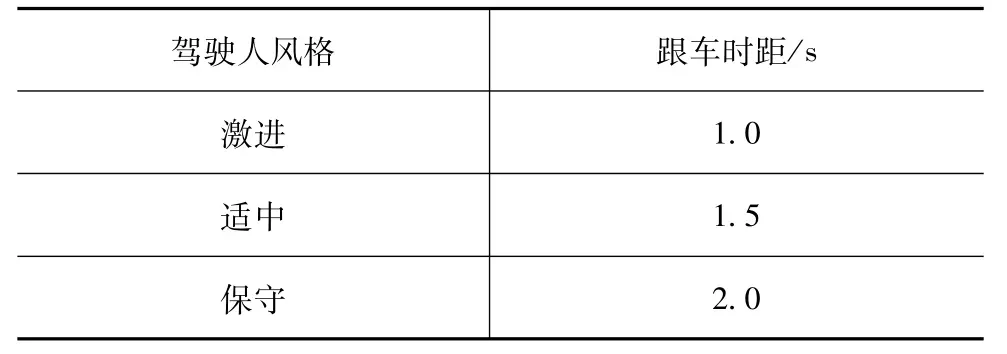
表1 不同驾驶人风格跟车时距
1.1.3 接管间距设计
接管间距模型根据是否考虑驾驶人介入,把接管间距分为制动安全距离和预警安全距离。预警安全距离考虑了驾驶人可接受的最小安全时距thmin内前车走过的距离。基于车辆制动过程[25]可分别计算前后车的制动距离sf和sl,由于无法得知前车驾驶人信息,所以对前车制动距离计算时省略驾驶人反应时间以及部分制动器响应时间。通过本车与前车最危险状态,即前后车制动距离差值的最小值,并考虑到两车停车之后应保持最小安全间距sm来确定制动安全距离,如式(2)所示。

为分析本车与前车最危险状态,将前车行进运动状态分为4种情况[26]:前车静止、匀速、加速和减速,如图2所示。并分别计算不同行驶工况下的制动安全距离和预警安全距离。
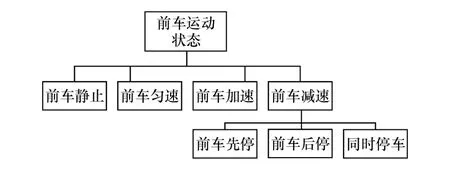
图2 前车运动状态
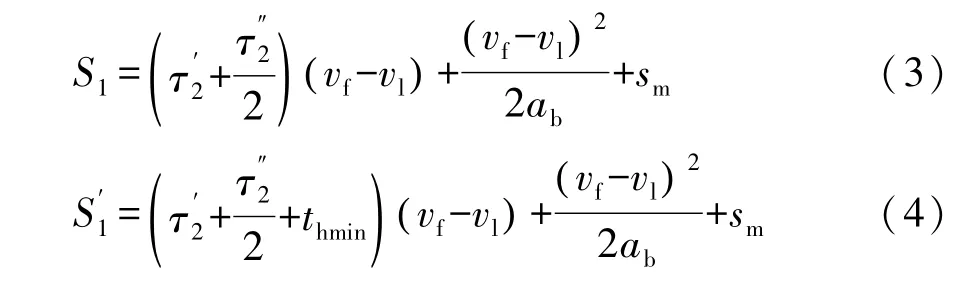
(1)前车静止、匀速与加速行驶工况
当前车静止时,自车停车时距离前车最近;当前车匀速运动时,假设前车速度为vl,本车速度为vf,本车以vf-vl速度相对速度相对前车前进,该情况可回归到前车静止情况;前车加速情况比前车匀速更安全,该情况可简化为前车匀速运动情况,因此以上3种工况的制动距离与预警距离可统一如式(3)和式(4)所示。
(2)前车减速行驶工况
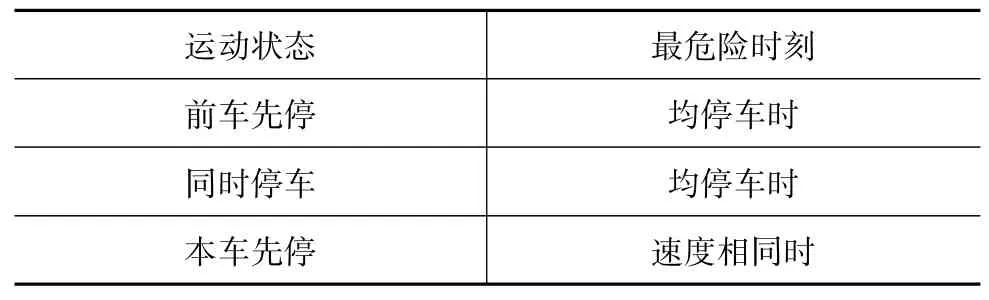
表2 前车减速行驶工况分类
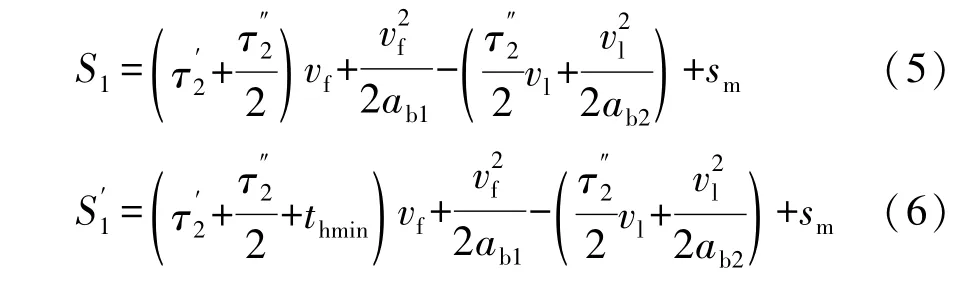
道路上很大一部分的追尾事故是由于前车紧急制动,后车制动不及时造成的。该工况可根据两车运动状态分为3种情况,如表2所示。由于本车先停时,两车速度相同时间点可在制动过程任何一个阶段,将最危险时刻认定为两车都停车时[26]。前车减速时制动距离与预警距离分别如式(5)和式(6)所示。
式中:ab1为自车制动减速度;ab2为前车制动减速度,假设前车以最大减速度制动,此时制动距离最小最危险,取-8 m/s2[27]。
驾驶人允许最小时距以及自车减速度考虑到不同驾驶风格,取值如表3所示[27-28]。
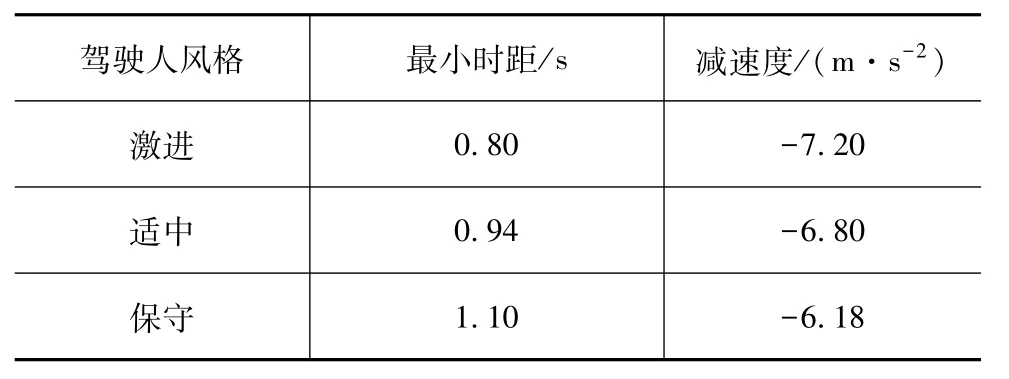
表3 不同驾驶人风格最小时距和减速度
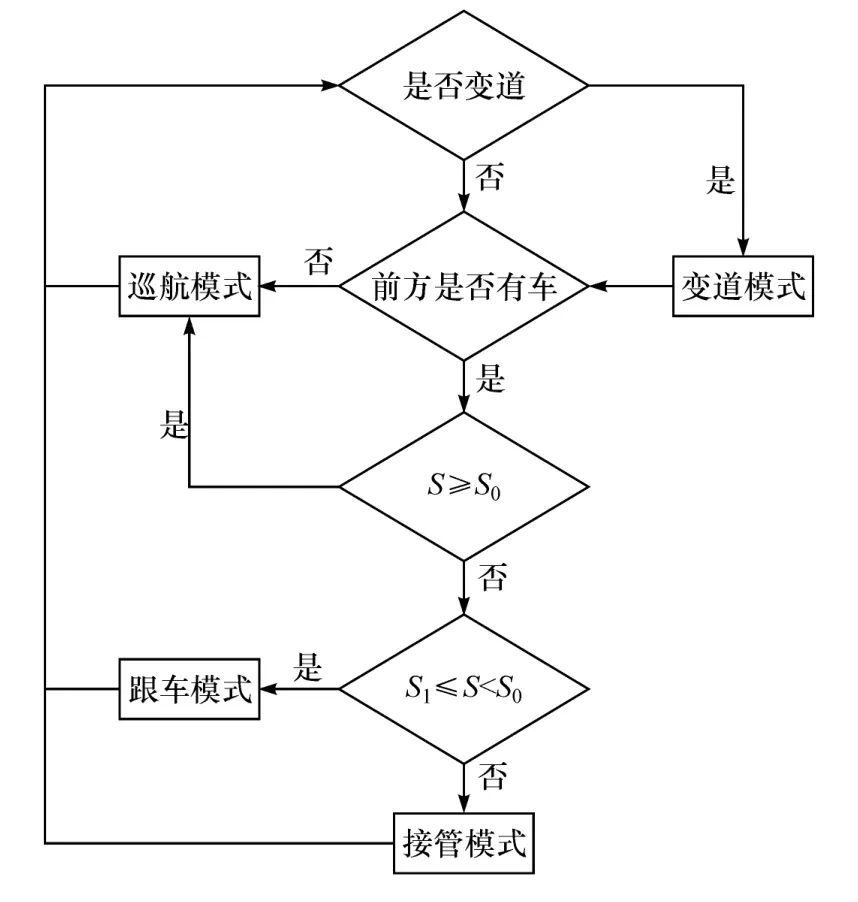
图3 模式切换策略
1.2 基于间距策略的模式切换策略
本文中提出的基于个性化间距策略的自适应巡航系统多模式切换策略如图3所示。图中S为自车与前车实际间距,ACC系统实时接收整车决策系统给出的变道信号,当变道信号为否时,则进一步判断前后车距,前方没车时,自车进入巡航模式;两车车距大于S0时,自车同样进入巡航模式;两车车距位于S0、S1之间时,自车进入跟车模式;当车间距小于S1时,则进入需要其他诸如AEB、ABS系统[29]介入的接管模式;当整车决策系统发出变道信号时,变道模式激活进行变道,完成变道后进一步判断前后车距从而切换进入巡航、跟车、接管中某一模式。
2 自适应巡航系统模式切换分层控制策略设计
2.1 控制方案设计
自适应巡航控制系统总体方案如图4所示。
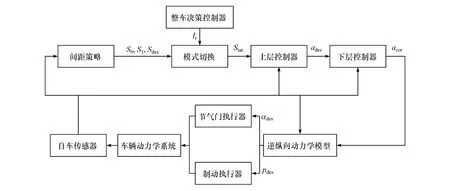
图4 自适应巡航模式切换分层控制方案
图4中,Sdes表示期望跟车距离,S0表示巡航距离,S1表示接管距离,Ir表示换道信号,Stat表示工况模式,ades表示期望的自车加速度,acor表示调整加速度,αdes表示期望的自车节气门开度,pdes表示期望的自车制动压力。分层控制由上、下两层控制器[30-31]组成,上层控制器根据传感器获得的车距、速度和加速度信息,判断自车安全状态,决策自车行车模式并输出期望加速度[32];下层控制器的控制对象是车辆动力学系统,由于车辆动力学系统的非线性,采用车辆逆纵向动力学模型[33]对其进行控制。上层控制器输出的期望加速度经过逆纵向动力学转换成期望节气门开度和期望制动压力输出,直接作用于发动机与制动系统以实现对期望加速度的跟踪控制[34-35]。
2.2 上层控制器设计
巡航模式和换道模式仅对纵向速度进行控制,因此采用简单可靠的PID控制器;跟车模式要对两车相对距离、相对速度进行控制,为考虑乘坐舒适性还应对加速度进行适当约束,为协调各性能指标,使控制器具有良好的鲁棒性,采用MPC控制算法进行控制器设计[36]。
2.2.1 PID控制器设计
巡航和换道模式采用PID控制,其控制量计算如式(7)所示。

式中:ec(t)为当前速度与设定速度的差值;通过试凑法,确定巡航模式参数Kp=10,Ki=0.1,Kd=0.05,确定换道模式参数Kp=80,Ki=0.2,Kd=0.3。
2.2.2 MPC控制器设计
跟车控制器采用车距控制策略,基于车辆运动学分析,建立跟车预测模型[37],并通过不等式约束和目标代价函数实现以下性能指标。
(1)跟随性指标
以两车相对距离和相对速度作为跟随性指标,设立目标代价函数:
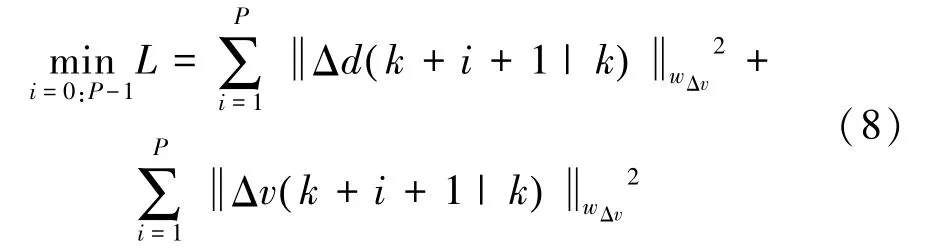
式中:P为预测时域长度;wΔd、wΔv分别为车距、车速误差权重。
(2)安全性指标
为保证本车安全性,车间距要始终保持大于安全车间距,同时两车之间距离不能过大,两车车速误差也不宜过大[37]。因此对两车间距误差Δd(k)和车速误差Δv(k)进行约束。

(3)舒适性指标
车辆行驶越平顺,燃油经济性及乘坐舒适性越好,通过约束车辆实际加速度和期望加速度实现行驶过程的平顺度要求[38]。

MPC控制器参数如表4所示,表中Ts为采样周期,K为液压制动系统增益,T为延迟时间;Q为误差权矩阵。
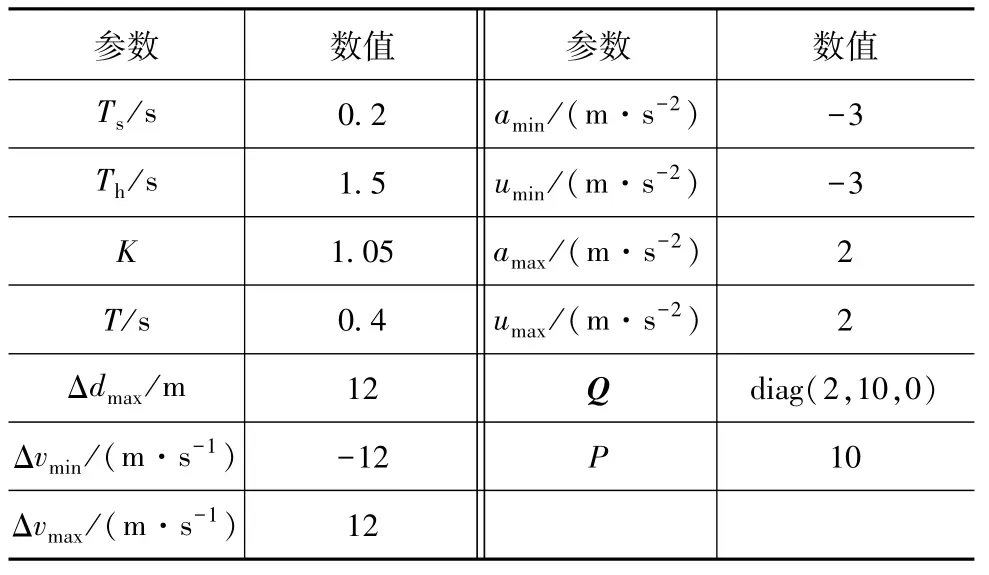
表4 MPC控制器主要参数
2.3 下层控制器设计
基于前馈和PID控制算法进行下层控制器设计,其中前馈控制有助于改善液压系统中建压迟滞的影响,反馈PID控制能够满足系统快速响应的要求。下层控制器的输入是期望加速度,输出是实际加速度,控制对象是逆纵向动力学模型和车辆动力学模型,其控制框图如图5所示。
将上层控制器得到的期望加速度ades(t)与当前车辆的实际加速度area(t)之差作为下层PID控制器的输入:
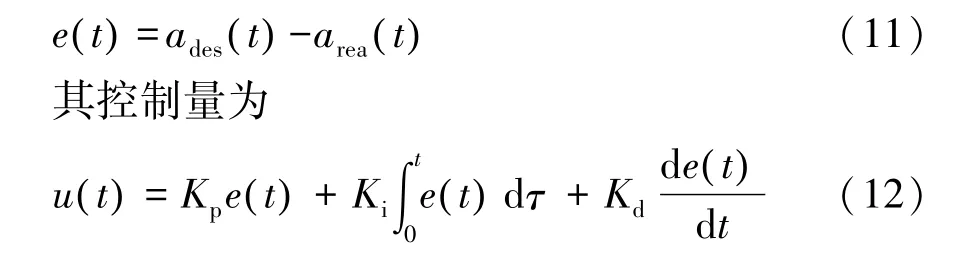
式中增益分别为Kp=0.8,Ki=0.6,Kd=0.05。
制动前馈控制器采用查表法,预先测定无控制效果的系统动态响应结果,并与给定期望结果相比较,分析偏差制定前馈补偿方案,最后做成二维表格形式。根据轮缸实际压力与理想压力的压差X,控制增压阀和减压阀的占空比信号Y1和Y2从而控制增减压阀的开闭,达到精确控制轮缸压力的目的,具体情况如表5所示。
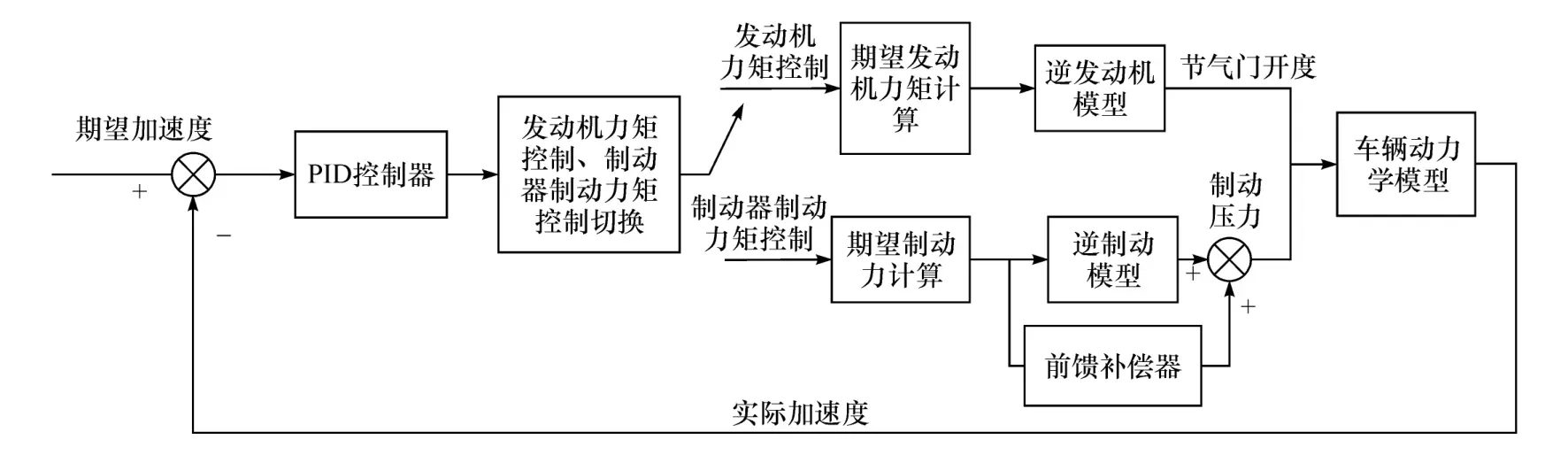
图5 下层控制器控制框图
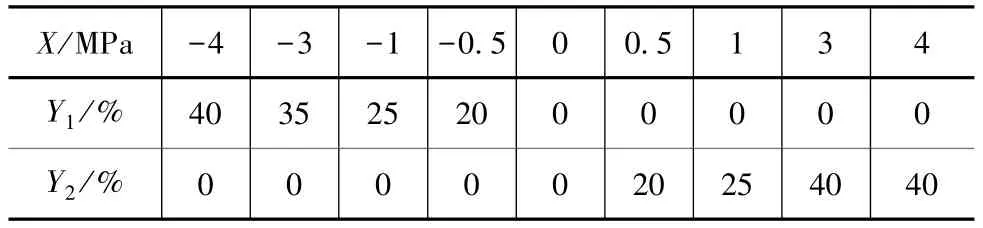
表5 前馈补偿器参数
3 仿真与验证
为了对设计的自适应巡航系统模式切换策略及控制器进行验证,搭建Matlab/Simulink与CarSim联合仿真模型,CarSim中两车的车型均选用B级掀背式轿车,前轮驱动,发动机功率为125 kW,其他系统参数如表6所示。
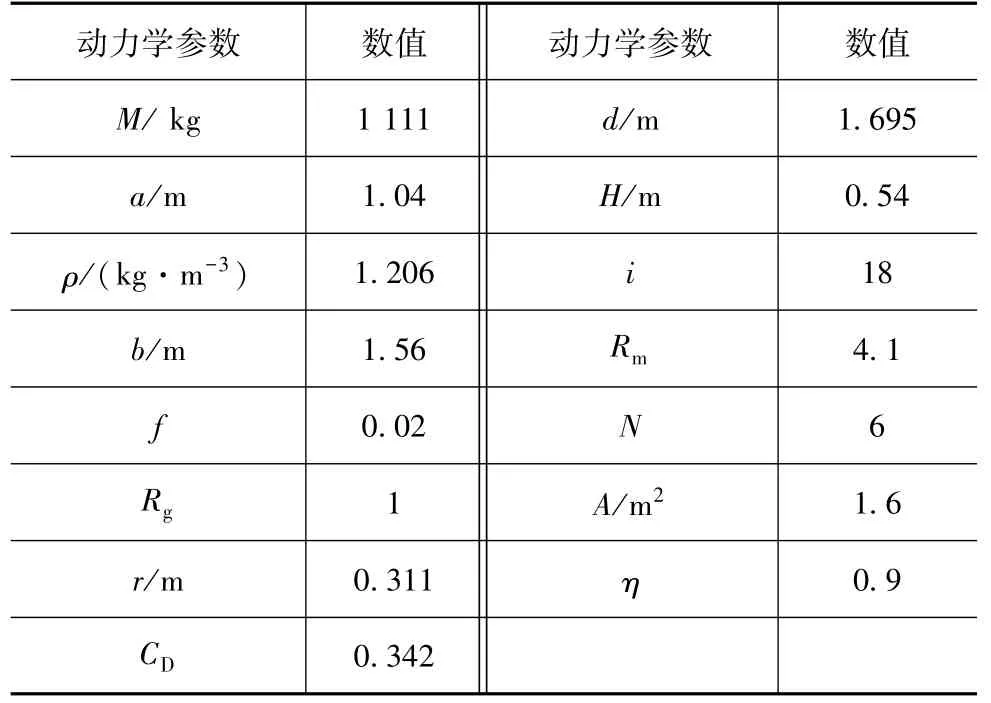
表6 整车基本参数
3.1 仿真试验设置
设置巡航、跟车、换道和接管工作模式和全工况切换模式5种仿真工况,各工况设置如下。
(1)巡航工况
汽车初始速度为25 m/s。0-10 s,设定巡航速度为27 m/s;10-20 s,设定巡航速度为20 m/s;20-30 s,设定巡航速度为10 m/s;30-40 s,设定巡航速度为15 m/s;40-50 s,设定巡航速度为10 m/s。
(2)跟车工况
前车速度在0-15 s以速度20 m/s进行匀速行驶,15-23 s以加速度1 m/s2加速到28 m/s,23-35 s保持匀速状态28 m/s行驶;35-40 s以减速度-2 m/s2减速到18 m/s;两车初始距离为50 m,本车初始速度为25 m/s。
(3)换道工况
0-30 s前车以车速20 m/s匀速行驶,30 s时,自适应巡航系统接收到换道命令,本车以变道前车速开始变换车道至旁车道,纵向车速为变道前车速20 m/s;变道之后,前方无车辆,本车以巡航速度15 m/s行驶;初始本车车速为25 m/s,相对距离为50 m。
(4)接管工况
前车车速在0-15 s保持为20 m/s,15 s时,前车急减速至10 m/s并保持本车速行驶;本车初始速度为25 m/s,两车初始距离为40 m。
(5)混合切换工况
前车在0-20 s以20 m/s速度匀速行驶,在20 s开始急减速到10 m/s,之后一直以10 m/s匀速行驶;本车在45 s接到换道命令,换道之后,本车道前方无车辆,本车以15 m/s的巡航速度行驶;本车初始车速为25 m/s,初始距离为40 m。
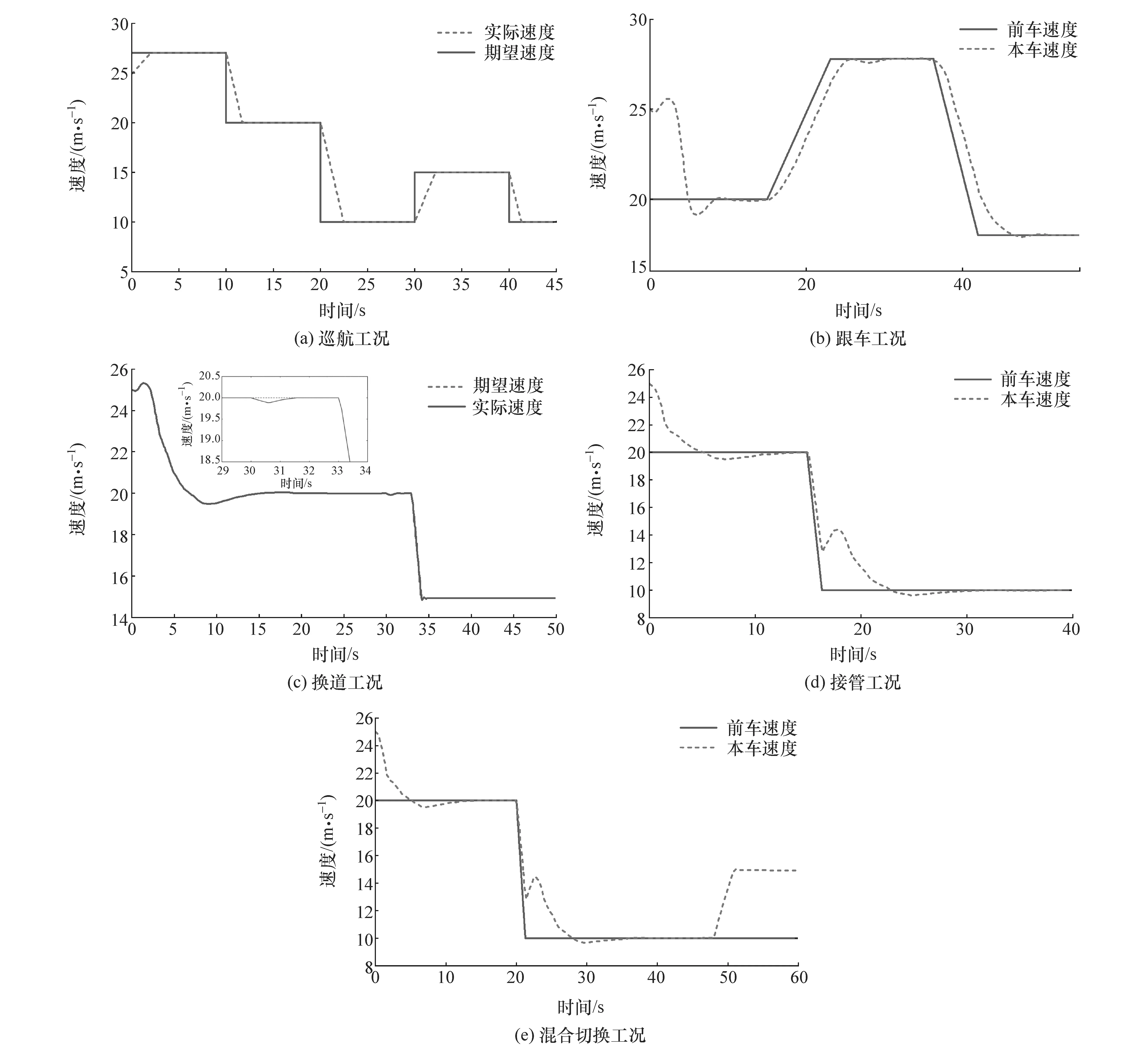
图6 各工况下车辆速度时间历程曲线
3.2 仿真试验结果
各试验工况下自车与前车的速度时间历程曲线如图6所示;本车加速度时间历程曲线如图7所示;跟车、接管、混合切换工况下本车与前车距离时间历程曲线如图8所示。
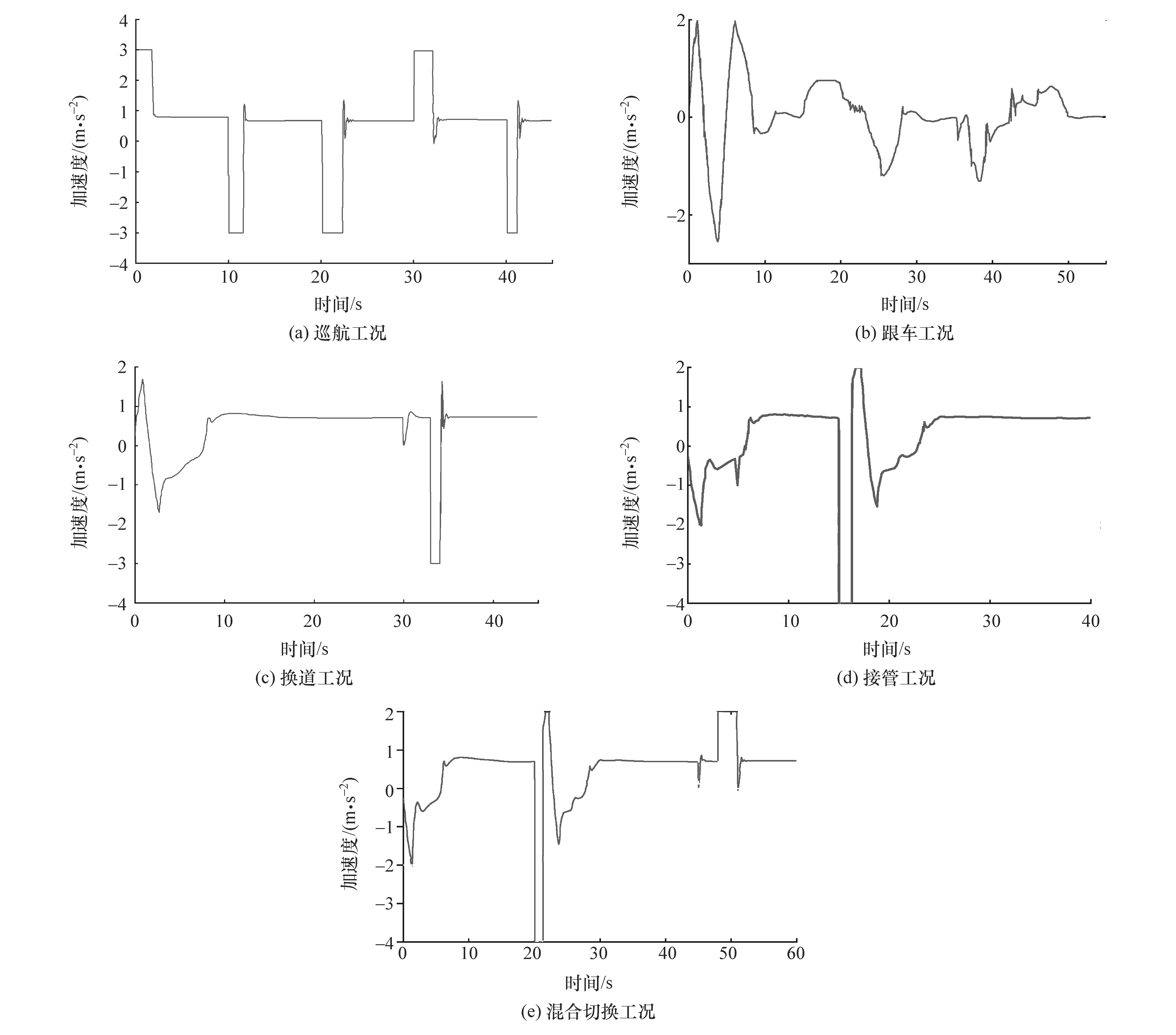
图7 各工况下本车加速度时间历程曲线
3.3 性能分析
3.3.1 快速性
由图6(a)可知,巡航工况下对于不同巡航速度,本车均在2 s左右加速至巡航速度;由图6(b)、图8(a)可知,跟车工况下5 s后,相对距离误差从12.5 m减到0,两车相对速度由5 m/s减到0;由图6(c)可知,自车开始变道后,纵向速度略有起伏,但基本保持与变道前速度一致;由图6(d)、图8(b)可知,在15 s之后的不到2 s的时间内由于前车的制动,两车实际距离小于接管间距34 m,本车快速进入接管模式,以自适应巡航系统允许的最大减速度-4 m/s2减速。各工况下系统均响应快速。
3.3.2 跟随性
由图6(a)可知,本车在达到预定巡航速度后均稳定跟随预定速度;由图6(b)、图8(a)可知,跟车过程中本车速度与前车速度差值、实际距离与期望距离的差值均很小,跟随性能良好。
3.3.3 舒适性
由图7(a)~图7(d)可知,除接管工况下紧急制动情况,加速度均未超过3 m/s2,保证了乘坐舒适性。
3.3.4 切换有效性
混合切换工况下,由图8(c)可知,0-20 s前车匀速行驶,两车间距大于接管间距13 m,本车进入跟车模式,控制系统响应较快,跟车过程平稳;20-22 s前车急减速,本车迅速进入接管模式,以自适应巡航系统允许最大减速度-4 m/s2持续进行减速,如图6(e)、图7(e)所示;如图8(c)所示,22-45 s前车保持匀速行驶,跟车间距大于接管间距9 m,本车进入跟车模式,与前车间距缩小,相对速度减小;在45 s时,本车进行换道操作,换道中主要对本车纵向车速进行控制,如图6(e)所示,换道过程本车速度稳定在变道前速度10 m/s左右;如图6(e)、图7(e)所示,在48 s后,本车道前方无车,本车进入巡航工况,巡航速度为15 m/s,本车先加速一小段时间,然后巡航行驶。综上,混合切换工况下,系统实现了有效平稳切换。
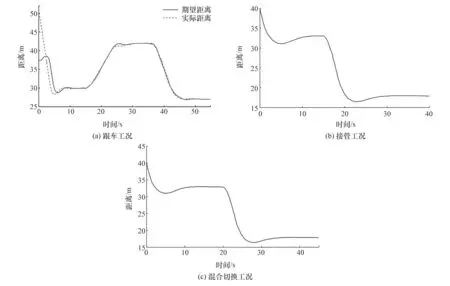
图8 各工况下本车与前车距离时间历程曲线
4 结论
(1)本文中针对不同纵向工况,采用了个性化间距策略。期望巡航距离和跟车距离基于行车安全性和道路行车效率,采用车头时距策略建立相关间距模型,并针对不同驾驶人的跟车特性设置了3种跟车时距,且基于制动过程建立了适应驾驶人风格的接管间距模型,对接管工况下前后车碰撞距离进行准确计算,在保证安全性的基础上进一步满足驾驶人的个性化需求,提高了接管准确性。
(2)采用分层控制器设计实现自适应巡航的多模式切换。上层MPC控制器通过设计代价函数及约束条件,保证了自车行驶的安全性,跟随性和舒适性,下层控制器充分考虑液压制动系统的建压迟滞效应和车辆动力学系统的强非线性,采用前馈和PID的控制达到快速、准确控制的目的。
(3)开展了巡航、跟车、换道和接管以及全工况切换模式5种仿真试验,4种基本工况下本车速度和与前车间距均能快速达到期望值,加速度除接管工况紧急制动情况外均未超过3 m/s2;混合切换工况下,控制模式根据实际工况平稳切换。结果表明本文中设计的自适应巡航系统模式切换策略及控制器满足快速性、跟随性和舒适性要求,实现了各工况之间有效平稳切换。
猜你喜欢
当代水产(2022年6期)2022-06-29
读者(2022年13期)2022-06-20
电脑爱好者(2021年17期)2021-11-11
北京航空航天大学学报(2021年9期)2021-11-02
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
小学生导刊(低年级)(2016年5期)2016-05-27
新高考·高一物理(2015年5期)2015-08-18
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14