基于改进区域分割遥感图像的航天器目标自动识别方法
2020-11-03 11:36严南,姚捃,黄宇
计算机测量与控制 2020年10期
严 南,姚 捃,黄 宇
(成都理工大学 工程技术学院,四川 乐山 614007)
0 引言
随着航天技术的不断发展,在不同的空间中频繁地活动,遥感图像技术在军事领域以及民用领域有着至关重要的作用,在现代战争中收集可靠情报需要依靠遥感图像航天器目标自动识别,在人们的日常生活中,驾车出行的导航功能也需要遥感图像的航天器目标自动识别技术来支撑运行。虽然遥感图像的航天器目标识别技术应用于多个领域,但是目前航天器对遥感图像信息数据处理能力未能达到相应的标准,遥感图像的分辨率不断地提升,导致航天器需要处理的信息数据量不断增长,同时航天器获取的遥感图像尺寸也显著地增加,依照目前的航天器数据处理手段无法对遥感图像实时有效的处理[1]。为了提升遥感图像高分辨率、大尺寸的利用率,提升航天器对目标的自动识别的稳定性与有效性,本文将针对不同场景下的遥感图像以及航天器的目标检测技术进行分析研究,在改进区域分割遥感图像的基础上分析航天器在不同环境下采用的相匹配的目标自动识别方法[2]。
遥感的特点是可以间接的接触目标来对目标信息数据进行采集,并对目标的数据信息进行判断分类、与分析识别,通过航天器拍摄的遥感图像是否能产生相应的效能,不仅取决于航天器的搭载平台,还取决于航天器对目标的自动识别方法,航天器对遥感图像的识别、分析、验证等方面的自动化程度[3]。
本文便基于改进区域分割遥感图像对航天器目标自动识别方法进行研究,提升航天器对遥感图像处理的自动化程度,实现遥感图像中目标的迅速转换成为航天器目标自动识别方法的刚性需求,使目标的检测与航天器在不同环境下自动识别方法产生联系,从而实现航天器对目标自动识别技术与遥感图像的特性相匹配,达到更高的目标自动识别层次。
1 基于改进区域分割遥感图像的航天器目标检测
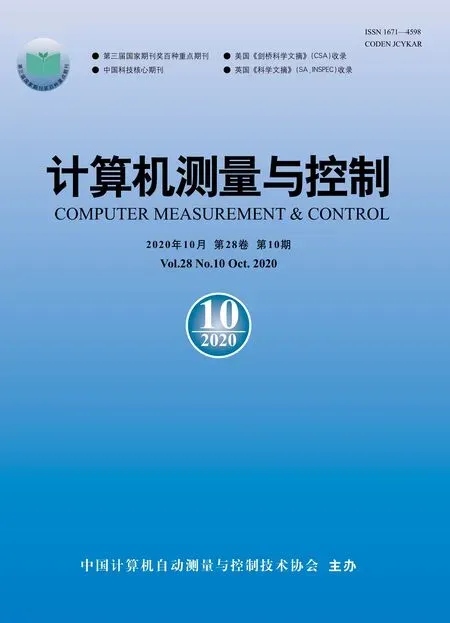
2003年,日本提出了基于航天器对接环部件的目标相对位置测量方法,该方法主要依靠航天器中的一个搭载火箭连接口的衔接设备,通过设备的位置以及设计蓝图的精准尺寸,这种方法首先设定航天器的目标检测结构以及尺寸、质量等,对衔接环进行特征提取和匹配,应用多视觉拍摄系统将航天器拍摄的遥感图像以红蓝黄光谱强度对比原则,将相应的目标从背景图像中识别出来,最后应用坐标和三维视图确定目标的位置关系[4]。2009年,我国提出了利用人机交互的方法完成了航天器对目标的自动识别与解算,该方法需要将航天器拍摄到的目标遥感图像传送到控制中心,通过人工排查的方式来追踪航天器所提供的位置信息,并建立三角形立体体系,提取出航天器所追踪的目标和航天器之间的位置关系[5]。图1为工作人员所建立的三角形立体体系的模拟位置图像。
图1 三角形立体体系航天模拟位置图
2012年我国建立空间智能系统通过线性结构和光学视觉传感系统来对航天器的目标进行位置测量,这种方法与人机交互的方式相似,均需要建立空间坐标进而寻找出目标位置[6]。
利用以上方法在遥感图像中识别航天器目标无法实现自主、实时、智能、系统的位置测量,从而造成了航天器目标测量运行情况的不稳定、可靠性差、延时长等缺点[7]。
1.1 航天器摄影成像检测
当航天器在对目标位置进行测量时,需要建立摄像机图像位置与目标所在图像位置之间的模型,将目标的图像位置模型传输到摄像机所在的模型中,根据摄像机所成像模型确定目标位置的特征点解析摄像机的内外参数,并根据这些参数,找到特征点在摄像机坐标内的三维坐标。随后摄像机对目标位置进行摄影成像,将位置坐标在三维空间内的坐标点投放为平面遥感图像,在摄影机。成像的过程中,实质上是坐标系与坐标系之间的旋转与平移,为了方便对航天器射成像检测需要建立多个坐标系[8]。
首先建立区域分割遥感地区坐标系,此坐标系是整个检测过程中最为基础的坐标系,其余坐标系均是建立在此坐标系之上,同时在检测中也起到坐标参考的作用,可以用来体现三维场景中的目标位置特征。还需要建立摄像机所在位置坐标系,取此坐标系的坐标原点作为摄像机成像的聚焦点,摄像机所在光轴位置即为成像方向,聚焦点也成为摄影成像的初始位置[9]。再建立普通物理坐标系与像素坐标系,将航天器所在的特征位置表现在坐标系中,取摄像机透镜光轴与成像平面的焦点锁定目标特征坐标与航天器摄像机的位置关系[10]。图2为航天器摄影成像检测坐标关系图。
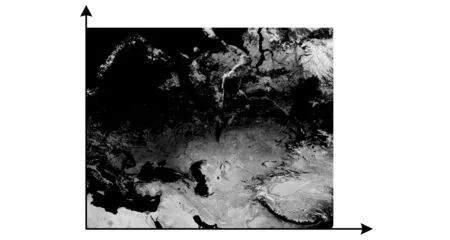
图2 航天器摄影成像检测坐标关系图
假设摄像机固定在航天器上,两者之间没有相对运动,在摄影成像检测的过程中,摄像机的成像原理主要为焦点透视成像,使航天器上的特征点与目标空间坐标之间呈映射关系,图3为摄像机成像原理图。
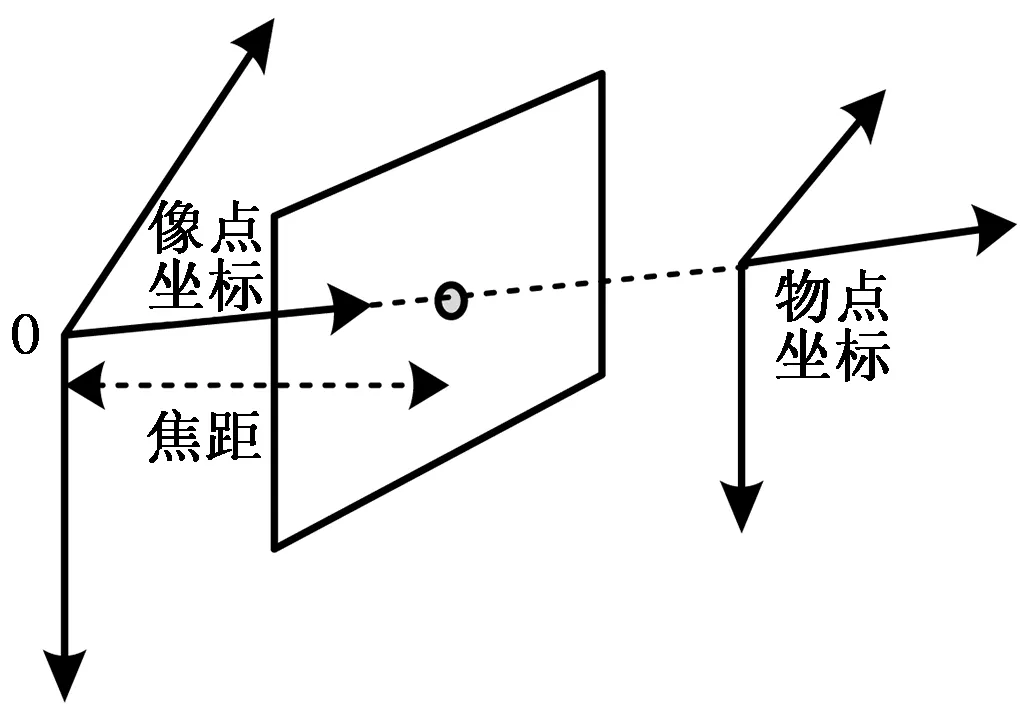
图3 摄像机成像原理图
1.2 三脚架特征检测
在航天器和摄像机的结构尺寸已知的情况下,若要确定航天器与目标之间的位置关系,需要先测量出航天器上特征点的坐标图像,在航天器主体与太阳能能源板连接部分,有一个三脚架装置,此装置具有结构特征突出、信息敏感强度高、所在位置优越等条件,对此装置进行检测有利于航天器对目标位置的精准识别[11]。
本文将利用Hjss信息转换思想对三角装置进行检测运算,根据三角形点与线之间的对偶性和三角形的基本特性,创建一个小窗口在遥感图像中滑动,选取该窗口的操作坐标,当操作坐标每滑动一像素都会对该窗口的操作坐标作Hjss信息转换处理,经过信息转换处理后的操作坐标原点与三角形内圆形的圆心重合时,参数空间会出现3个峰值点,3个点的坐标绝对值相同并且经过旋转可以重合[12]。操纵坐标原点0在三角形内滑行的范围如图4所示。

图4 操纵坐标原点0在三角形内滑行的范围
1.3 航天器对接环检测
航天器的对接环大多呈椭圆形,通过应用椭圆的标准参数方程将椭圆的长半轴与短半轴围绕中心点进行旋转后,可以得到椭圆特征如图5所示。
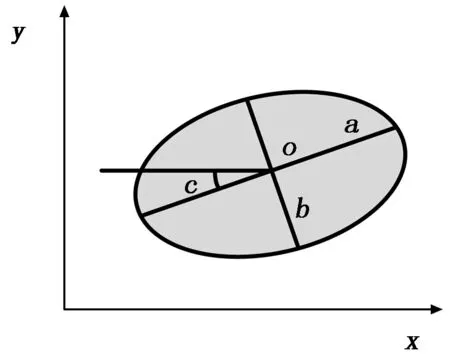
图5 椭圆特征图
航天器对接环的检测便是利用椭圆的基本原理,在对接环中心寻找目标的检测突破口,首先在椭圆边缘上的切线进行分类,并将切线的参数值进行预处理和传输到遥感图像中,借助椭圆边缘的切点和极端点两点来寻找椭圆的中心,通过中心位置建立遥感坐标,将建立的遥感坐标提取到原始图像中,对原始图像进行去噪处理,围绕目标点进行区域划分并选取较高效率的切线斜率,将所获取的切线斜率进行初步筛选判断,选取最终的切线斜率进入参数空间中,统计航天器对接环在目标自动识别的过程中,所产生的参数峰值和阈值划分情况,最终采用Matlab搭建数学模型,以遥感图像的形式表现出检测结果,航天器对接环的成像结果如图6所示。
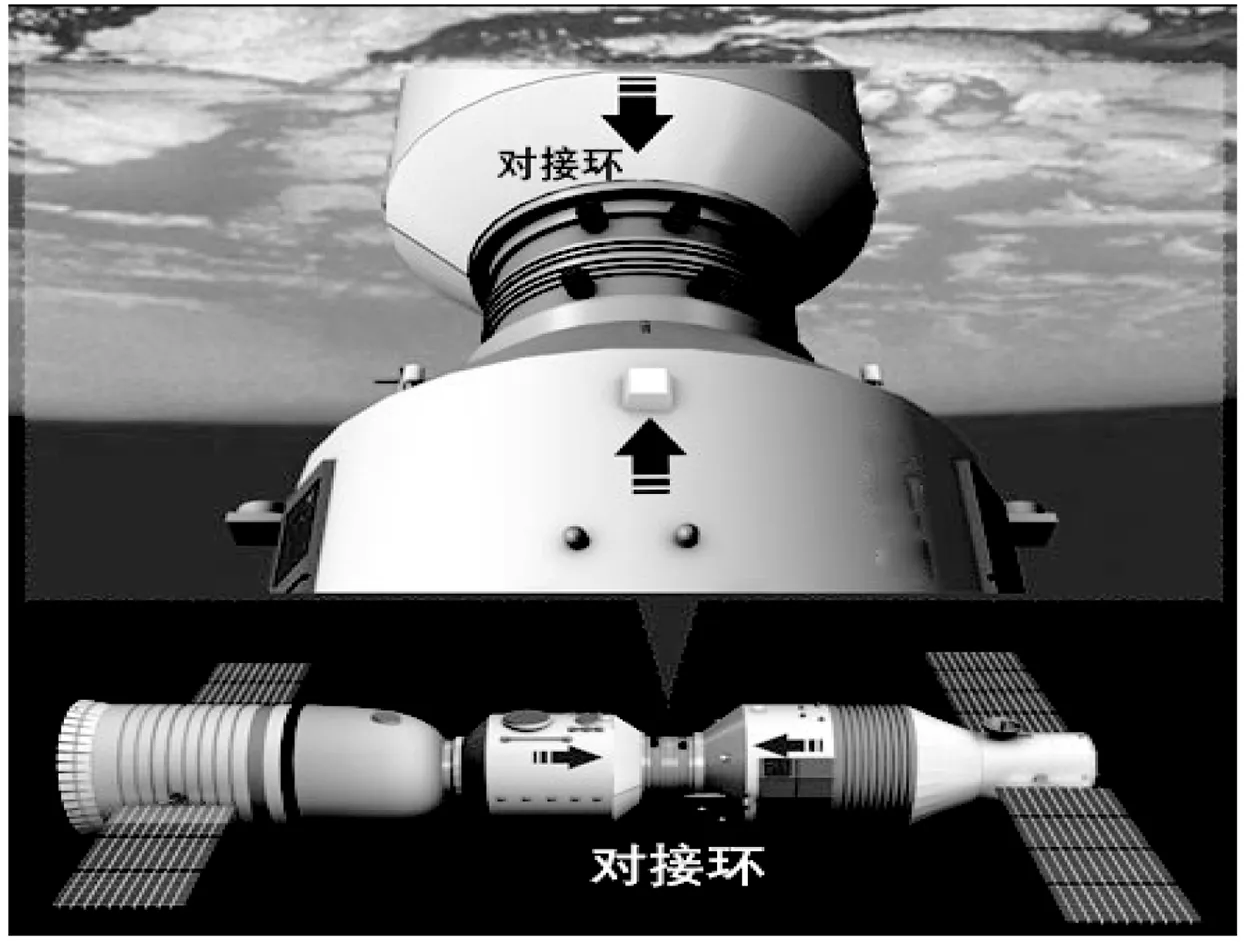
图6 航天器对接环成像结果图
2 基于改进区域分割遥感图像的航天器目标自动识别方法研究
2.1 复杂场景下基于改进区域分割遥感图像的航天器目标自动识别
根据地形地貌以及气候的不同,地球表面将会产生许多复杂的环境,在阳光照射较强的环境中会出现照明不均匀、航天器零部件反光等情况,这些光照变化均会影响航天器对目标的识别能力,同时航天器上的能源供给设备、对接环以及其他位置的零件等由于结构种类的不同,使航天器对目标的识别增大了难度,在太空空间站中还会有许多的电磁辐射以及其他不同种类的能量干扰,影响了航天器与地球地面控制中心的信号通信功能,使得航天器的信息数据处理能力面临严峻的挑战,因此需要一种能够使航天器在复杂情境下快速稳定、安全可靠、能够快速适应的方法,为航天器对目标的识别提供坚实的保障[13]。
本文将引用光学视觉机器处理原理,来解决航天器在复杂环境中无法准确、稳定、可靠的识别目标问题,此项原理成熟的应用在光学精密测量与产品的自动化检测以及地面位置控制中,具有精准度高、实时性好、运行速度快等优势[14]。
本文提出了击穿识别方法,基于遗传算法以及变换算法,击穿识别方法主要采用激光光线射在被识别物体上,使该表面形成等离子体,再利用等离子体光谱,分析被识别物体中所含有的元素。遗传算法主要利用优胜劣汰、适者生存等进化规则,搜索全局最优解,变换算法则能够快速完成信号的时域和频域的转化过程,实现了在复杂的自然遥感图像中能够识别多种目标,但是对于残缺和不完整的目标识别性差,因此又在方法中引入了自动学习智能识别算法,解决了在遥感图像中残缺不完整的目标识别效果差的问题。在对目标进行识别的过程中,航天器首先对目标进行粗略识别,在遥感图像中随机取4个点,将点与点之间连接形成一个多边形,在此多边形中加入切边圆形,计算拟合圆匹配度与拟合精准度,如果拟合圆的测量值小于多边形三点共线值,则将该圆形切除建立新的边缘线段,如果拟合圆的测量值大于多边形三点共线值,则将此圆保留作为候选遥感区域。经过粗略计算识别后,在拟合圆中选取圆心和半径并截取一道圆弧,在圆弧中应用最小二乘法计算出半径的值以及圆心所在位置坐标,随后对圆心坐标进行跟踪,由于环境的复杂化会导致圆弧的断裂分割,所以还需要对圆弧进行圆的重组对新圆进行验证识别,从而提高了识别精准度以及穿透了复杂环境对目标识别的影响[15]。图7为在复杂场景下基于改进区域分割遥感图像的航天器目标自动识别方法流程图。

图7 复杂场景下基于改进区域分割遥感图像的航天器目标自动识别方法流程图
2.2 运动模糊场景下基于改进区域分割遥感图像的航天器目标自动识别
航天器在对运动目标进行拍摄的过程中,由于目标的运动导致在摄相机成像时图像底片产生位移,因此图像出现模糊。当由于运动而产生的图像模糊较为轻微时,运用传统的识别算法即可对目标进行识别,但是如果由于运动导致图像模糊较为严重,遥感图像边缘不清晰常规算法无法对遥感图像边缘进行检测,从而致使目标检测识别失败。所以需要对由于运动产生的模糊进行清晰化处理[16]。
本文为了解决模糊图像问题,建立了模糊退化模型,在模糊退化模型中根据是否知道模糊核心所在位置分为两种处理方法。当知道模糊图像中心的所在位置时,直接采用非盲猜线性回归方法即可对模糊图像进行估计处理,使用航天器中的滤波器以及降噪装置可以将模糊图像恢复为清晰图像;当未知模糊图像核心所在位置时,模糊图像中的维度和核心维度之间产生较为强烈的非对称性,当模糊图像的维度不断增加时,模糊图像的核心维度却保持不变,无法将两种核心统一化处理,使得传统的非盲猜线性回归方法不能对模糊图像进行清晰化处理,本文将引用模糊核心0范数的方法实现对模糊图像清晰化处理。
在应用0范数方法时,首先对模糊图像核心进行估计,使模糊核心在航天器的信息处理器中快速的变换运算达到共轭的效果,随后恢复图像的边缘清晰度,应用拉格朗日乘子法将模糊图像的约束条件转换为各类子问题,求得子问题的近似值,将近似值不断地进行迭代逐渐的接近0范数。经过算法处理后得到了模糊图像核心的精准位置,航天器即可对目标进行精准识别。
3 实验研究
3.1 实验目的
为了使航天器更好地对目标进行识别,本文提出了不同情况下的两种识别方法,为了验证本文提出方法具有稳定可靠性以及有效性,设立对比实验进行研究,将本文所提出的方法与传统的方法进行对比,根据两种方法在实验中的数据情况确定本文方法是否具备一定的可靠稳定性以及有效性。
3.2 实验过程以及结果分析
为了防止实验的偶然性,本实验将对不同地区的机场、山脉等多处地点进行目标识别,首先对遥感图像的分辨率以及尺寸进行统一化处理,并将遥感图像进行分割,设立不同的图像中心点,首先采用山脉遥感图像作为训练样本,分割长、宽均为25 cm的遥感图像进行训练验证,应用传统的航天器目标自动识别方法在此分割区域中进行目标识别,由于山区的地形较为复杂,自然环境对航天器的目标自动识别功能有一定的影响,所以传统方法所识别出的目标有多种类,不能精准的确定目标情况,传统航天器目标自动识别方法所识别出来的遥感图组如图8所示。
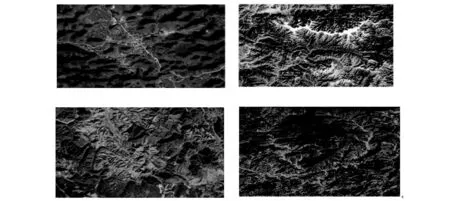
图8 传统航天器目标自动识别方法所识别出来的遥感图组
图8中,4张遥感图像均为传统方法下航天器对目标自动识别出的结果,可见传统方法的精准性较弱,无法精准地对目标进行识别,还需要人工进行进一步的识别处理工作,传统方法识别出的目标当相似度小于20%时航天器便无法继续进行进准识别,最终的目标识别只能以图组的形式体现出来。
将相同的分割遥感图像置于本文提出的复杂场景下基于改进区域分割遥感图像的航天器目标自动识别方法,针对于山脉地区的复杂地形,航天器在进行目标自动识别的过程中,对光照、海拔等因素智能穿透,较为稳定的识别筛选,最终识别出一个精准目标,无需人工处理即可应用在其他领域中。图9为本文方法下航天器对目标进行自动识别的遥感识别图。

图9 航天器对目标进行自动识别的遥感识别图
本文方法下的航天器目标自动识别具有较高的精准性,能够直接识别出目标无需再次进行人工筛选。通过实验对比发现,本文方法下的航天器对目内圆标的相似度识别能达到5%左右,高于传统方法的15%左右。本文还针对运动模糊的情况下进行航天器目标自动识别,飞机场中的飞机在飞行的过程中由于运动的限制导致遥感图像的模糊,但是经过本文方法的处理,模糊图像成功转换为清晰图像,如图10所示。
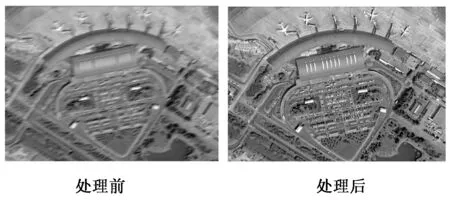
图10 经过本文方法处理前后的遥感图像对比图
根据图10中的对比结果可知,本文方法对于航天器目标自动识别的清晰度有着较大程度的提升,通过识别器对遥感图像的清晰度识别,发现应用本文方法处理后的遥感图像相对于未处理的遥感图像清晰了15.23%,为目标的识别夯实了稳定的基础。航天器对动态模糊的识别受目标速度的直接影响,本实验还对速度对识别能力的影响程度进行了计算,具体数值对比如表1所示。

表1 不同速度下航天器识别能力的影响对比表
根据表1中的数据可知,速度的大小对传统方法下航天器的影响较大,而对本文方法下的航天器识别能力影响较小,在清晰度方面两种方法相差20%左右,在精准度方面相差5%~50%不等。
4 结束语
利用区域分割遥感图像航天器对目标进行自动识别,实现对部分地区的实时观测以及情报收集等功能,而高分辨率的遥感图像为航天器的目标识别制造了一定的困难,因此本文针对环境复杂化以及图像模糊提出多种解决方法,使航天器的目标自动识别工作更加的稳定。
猜你喜欢
国际太空(2022年7期)2022-08-16
农业工程学报(2022年5期)2022-06-22
舰船科学技术(2022年10期)2022-06-17
计算技术与自动化(2022年1期)2022-04-15
导航定位学报(2022年2期)2022-04-11
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19
语数外学习·高中版中旬(2021年11期)2021-02-14
考试周刊(2018年15期)2018-01-21