
水陆一体化三维测量时空基准研究
2020-11-02 04:55甄冬松
装备维修技术 2020年38期
甄冬松
关键词:坐标系统一、时间基准
引言
激光和多波束点云水因有不同的参考基准、比例尺和坐标系统,导致数据精度也存在差异;并且内陆水域一般多为不规则的形状区域,水下地形与岸边水上地形接边处难以实现平滑拼接。在实际中水上与水下是互相连接的,然而在应用中水下地形和陆地地形数据是两部分,并未实现一体化应用。因此,有必要对内陆水下地形数据进行测绘以及整合,实现各种基准空间数据的整合,才能实现对基础地理信息的融合集成管理。
1 空间统一
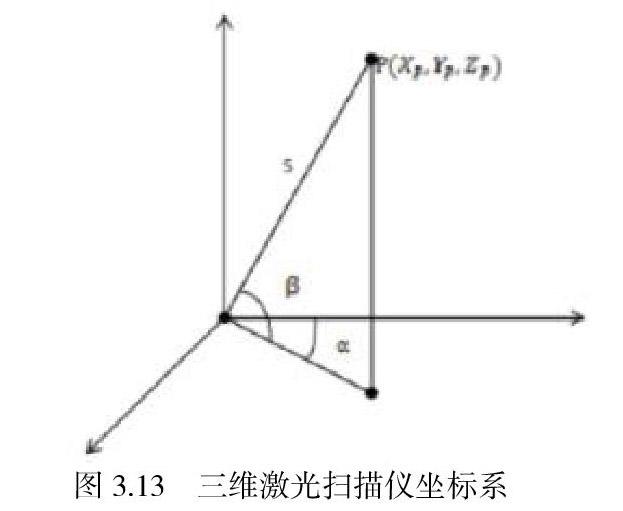
1)三维激光扫描仪坐标系
三维激光扫描仪坐标系是自定义坐标系。该坐标系的原点定义于三维激光扫描仪的发射中心,Z轴与极轴平行,方向垂直向上,与X轴构成激光扫描面(XOZ面),Y轴垂直于XOZ 面。在进行激光束扫描时,待测点P坐标可由P点与扫描仪中心距离S、水平角、垂直角计算得出。
2)多波束测线坐标系
由于多波束测深仪采用具有一定角度的扇形波束发射,多阵列回波信号接收
和多波束数据的转化及处理等技术。为了建立多波束测量水底地形点位的空间关系,进行多波束测量波束的空间位置转化,须首先建立多波束测量自身的参考坐标系统。多波束坐标系原点为换能器中心,发射的扇形波束面的每一根波束的角度固定且已知,由声速及传播时间,计算每个波束到达水底点位的斜距,进而计算各波束位置及水深。
3)船载坐标系
船载多传感器综合测量系统主要将三维激光扫描仪、多波束测深仪、GNSS、定姿定向系统等集成在测量船上,其基本思想是:系统通过传感器稳定平台,将水上水下设备进行固联,用以确定扫描仪、多波束与GPS 的空间位置关系,从而将组合导航GPS /IMU 的实时位置、姿态信息提供给激光扫描仪和多波束。通过船载多传感器的协同信息采集,将测得的点位坐标归算到统一的坐标系下。本次测量时,定姿定向系统固定在船舱内部,处于整条测量船的中心位置。三维激光扫描仪固定在船艏。多波束测深仪固定在船右舷。以 Trimble R4 GPS接收机的中心位置建立了船参考坐标系,利用全站仪、钢尺测算了多波束、三维激光扫描仪、定姿定向系统等各传感器相对于参考坐标原点的偏移量和水面与参考原点之间的高差,记入到多波束系统安装、校准综合手簿、三维激光扫描仪文件参数和船型文件中。
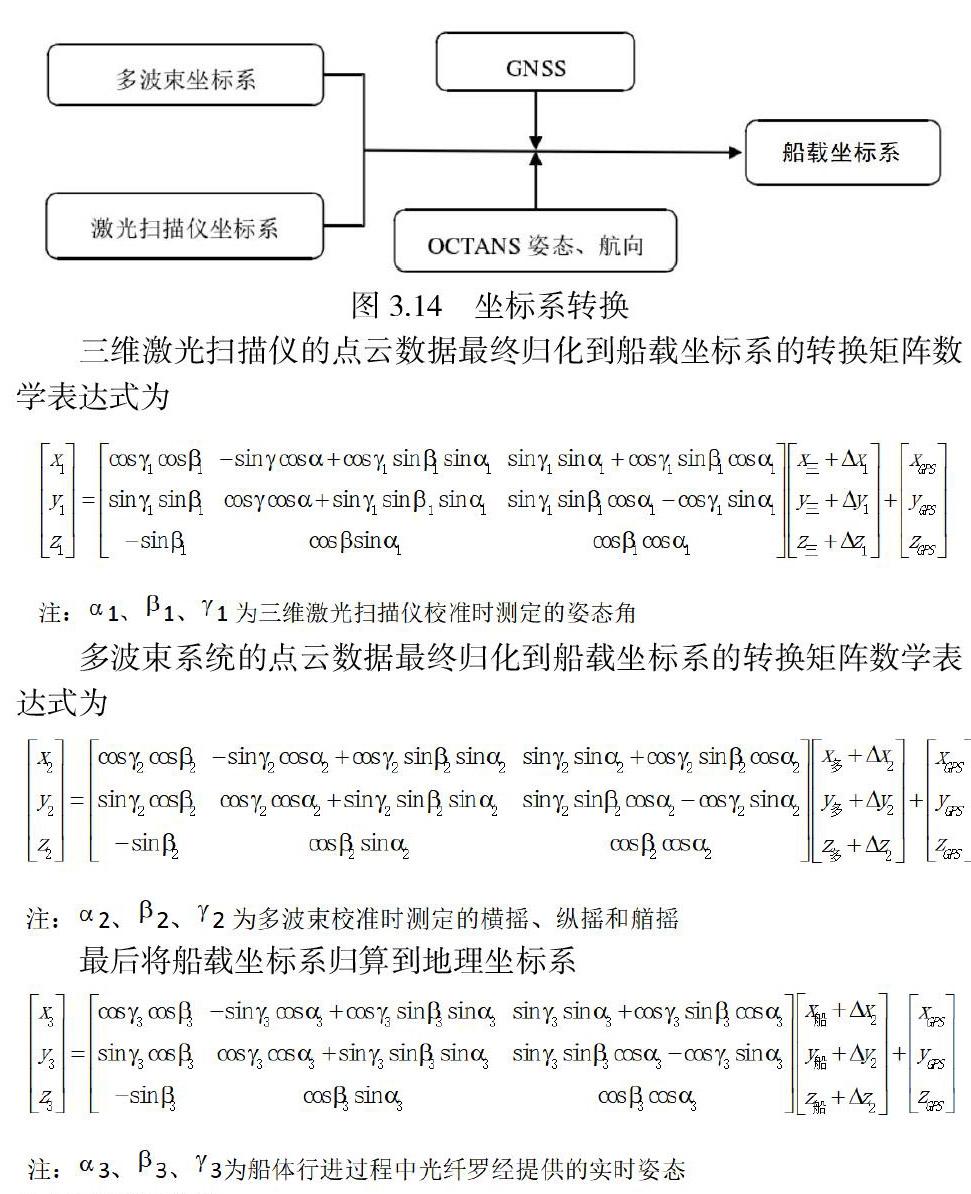
水陆一体化测量系统集成了三维激光扫描仪、多波束测深仪、GNSS、OCTANS 和测船等设备,各传感器均有其独立的坐标系,通过其相对位置关系确定,结合 GNSS 实时定位数据、OCTANS 实时姿态及定向数据,转换为该水陆一体化地理坐标系。
三维激光扫描仪的点云数据最终归化到船载坐标系的转换矩阵数学表达式为
多波束系统的点云数据最终归化到船载坐标系的转换矩阵数学表达式为
最后将船载坐标系归算到地理坐标系
2 时间基准统一
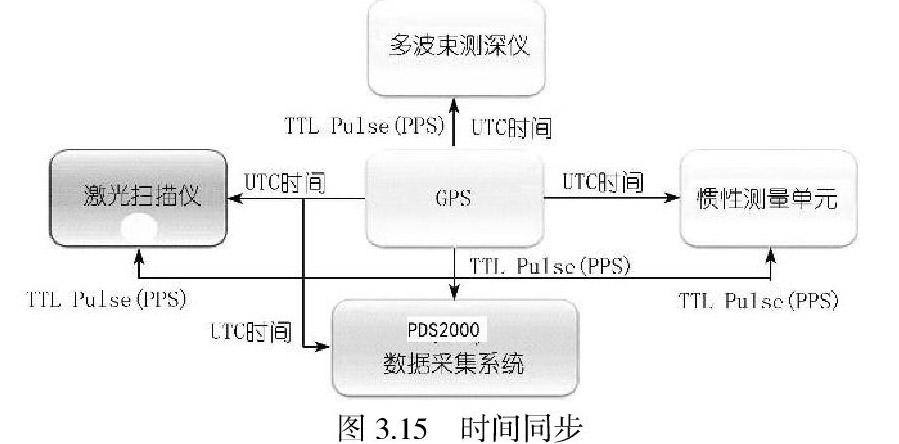
水陆一体化三维测量系统由多传感器组成,为了将各传感器数据准确融合,除需各坐标系统的转换,数据正确时间也必不可少。时间同步一般有两种方法:一种是时间延迟法;另一种是时间同步法。时间延迟法是基于时间延迟恒定不变的假设,会有一定误差;时间同步法就是利用GPS的时间与1PPS不停地调整各传感器的时间,使各传感器的时间始终与GPS的时间保持同步。本次项目时间系统采用的是利用GPS的1PPS时间分别连接到多波束系统、定姿定向系统和三维扫描系统,实现时间的同步。
时间配准的目的是让每个激光扫描点都能得到测量该移动站的实时坐标和姿态数据。由于GPS接收机的频率为10Hz、定姿定向系统的频率为50Hz和三维激光扫描仪的频率为10KHz,多波束测深仪的频率为200KHz且数据获取时刻并不互相重合,因此需要将频率低的传感器所采集的数据以时间为标准向频率高的传感器所采集的数据进行内插处理。考虑到时间间隔小,采用加权平均值求取即可。通过GPS接收机的位置信息和定姿定向系统的姿态数据,便可以求取激光扫描仪和多波束测深仪的准确数据。
式中X为内插值,L1为插值区间起始时间的测量值,L2为插值区间结束时间的测量值,K1为插值时间与插值区间起始时间之差,K2为插值时间与插值区间结束时间之差。
3实验结果
项目组对本系统进行了应用示范,对水陆一体化采集系统进行了针对性测试。其中,系统水上部分采用LANDMark Marine三维激光扫描仪,最大测量距离为1700m,测量精度8mm,垂直扫描角度为30°~130°;系统水下部分采用多波束Seabat 7125SV2,最大量程500m,量程分辨率為1. 25cm,覆盖宽度10°~160°,分为256 个波束。图3.20给出了系统对团泊东区别墅区附近的实验效果图,利用水陆三维一体化测量系统,提高了作业效率,降低了作业风险,减轻了作业劳动强度,且成果丰富,应用广泛。
4.总结
通过水陆一体化三维测量技术研究,研制了船载水陆三维一体化综合测量系统,提出了水陆地形无缝扫测方案及无需潮位观测的多波束水深测量技术,给出了船载多源传感器配置方案、校准方法、坐标基准统一方法、测深和地形点云处理方法、多源点云数据融合方法以及精度评估方法,形成了水上水下一体化测量的方法体系,取得了满足规范要求的点云精度,克服了传统测绘方法的技术瓶颈,实现了河道带状地形图的一体化移动测量,为河道及滩涂三维地理信息要素的高精度、低成本、高效获取提供了一种新途径。
参考文献
[1]杨盼.水陆三维一体化测量系统的集成与实现[D].成都理工大学,2018.
[2]李英成,文沃根,王伟.快速获取地面三维数据的LIDAR技术系统[J].测绘科学,2018,(04):35-38.
猜你喜欢
收藏家(2022年5期)2022-06-17
科学与财富(2021年36期)2021-05-10
现代信息科技(2021年21期)2021-05-07
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
学苑创造·A版(2009年6期)2009-12-07
计算机世界(2009年35期)2009-11-17
