
隧道掘进机多功能化及智能化的发展与推广
2020-11-02 07:15谭顺辉
隧道建设(中英文) 2020年9期
谭顺辉
(中铁工程装备集团有限公司, 河南 郑州 450016)
0 引言
暗挖法修建隧道的方式主要有3种,分别是矿山法、新奥法和隧道掘进机法。隧道掘进机法是安全、高效的隧道开挖方法,国外大多统称为TBM法,国内对于软土地层开挖称为盾构法; 对于岩石地层开挖,则称作TBM法。隧道掘进机是周边带有保护壳体,具有开挖和前进功能的隧道施工专用设备,经过较长时间的发展,当前在隧道全断面一次性开挖、岩土出渣、隧道支护以及隧道掘进机自身动力系统配置和控制技术等方面已经十分成熟[1],出现了硬岩隧道掘进机、土压平衡隧道掘进机及泥水平衡隧道掘进机等系列化设备; 刀盘断面从圆形发展到矩形、马蹄形、椭圆及其他异形; 从单一模式向双模式发展,也开始了三模式试验研究试制工作。
近年来,国内外铁路、公路、水利等基础建设对全断面隧道掘进机提出了巨大的市场需求[2]。同时,人工智能技术进入了集成发展期,机器学习、人工神经网络与深度学习等理论的提出和迅猛发展,都加速了人工智能的现实应用[3]。这些技术开始应用到不同的工业领域和工程项目之中: 先进的感知技术逐步应用到工程施工现场中,“智慧工地”越来越多; 近来,国内外学者和工程技术人员也正在对隧道掘进机智能化开展一些研究工作[4-6],但这些研究大多停留在理论和试验层面,实际应用较少。对于隧道掘进机法,其如何针对复杂工程地质环境采用不同模式掘进,如何采用不同功能适应不同工况,如何进行智能感知并实现自主决策,以不同的功能模式、掘进参数掘进以及智能预警等,是当前需要解决的重要课题。
目前,工程地质和水文条件仍对隧道掘进机的适应性有着一定的限制。随着多模式、组合功能设计制造和控制技术的进步,以及现代地质预报、新型辅助破岩技术、岩渣监控、智能自主决策掘进和预警等技术的发展,隧道掘进机未来将逐步摆脱地质和水文条件的限制,以多模式、多功能、智能化的技术性能适应复杂隧道工程的要求。
1 多模式隧道掘进机技术的应用和发展
在隧道掘进机施工中,同一个隧道工程项目的不同隧道里程有时会出现地质条件变化较大的情况,即使同一里程断面内,其上下左右也可能存在地质不一样的情况(如上软下硬地层),从而造成隧道掘进机选型时难以抉择; 或者是在隧道掘进机设计阶段为了满足占比高的地质条件的适应性不得不做出设计折中,从而导致机器在占比小的地质段施工时不能充分发挥应有优势。为了更好地解决这些问题,研制出多模式隧道掘进机是良好的应对方案。多模式掘进机是为适应隧道开挖过程中地质发生明显变化时能转换工作模式的新设备。
1.1 双模式隧道掘进机的应用
作为多模式隧道掘进机的一种,双模式隧道掘进机近些年得到了广泛应用。双模式隧道掘进机主要有3种,分别是土压-硬岩双模式掘进机、土压-泥水双模式掘进机和泥水-硬岩双模式掘进机。这里仅就新型土压-硬岩双模式掘进机进行阐述。
土压-硬岩双模式隧道掘进机(见图1)的原理是使用2种出渣方式(中心螺旋输送机出渣和底部螺旋输送机出渣),可同时适应软弱地层、围岩较差地层和硬岩地层,设备同时具备土压平衡掘进模式和硬岩掘进模式。由土压模式向硬岩模式转换时,只需将底部螺旋输送机伸入段从刀盘土舱的下半部分取出并抬升至压力隔板中心部位,同时封闭土舱隔板下部的前闸门,并将刮渣板和溜渣构件装配到刀盘上即可完成模式转换。该模式转换预计需7~9 d完成,比使用传统中心皮带机出渣双模式隧道掘进机的模式转换能节省约一半时间。曾经有另外一种土压-硬岩双模式隧道掘进机,不变动土压平衡模式掘进时螺旋机的位置,在岩层地段采用敞开模式掘进,依旧是同样位置的螺旋输送机出渣,这种模式下,因为螺旋输送机的坡度问题,导致出岩渣的效率相对较低,螺旋叶片和螺旋筒体内壁磨损较快,仅适合于硬岩段较少的隧道项目。
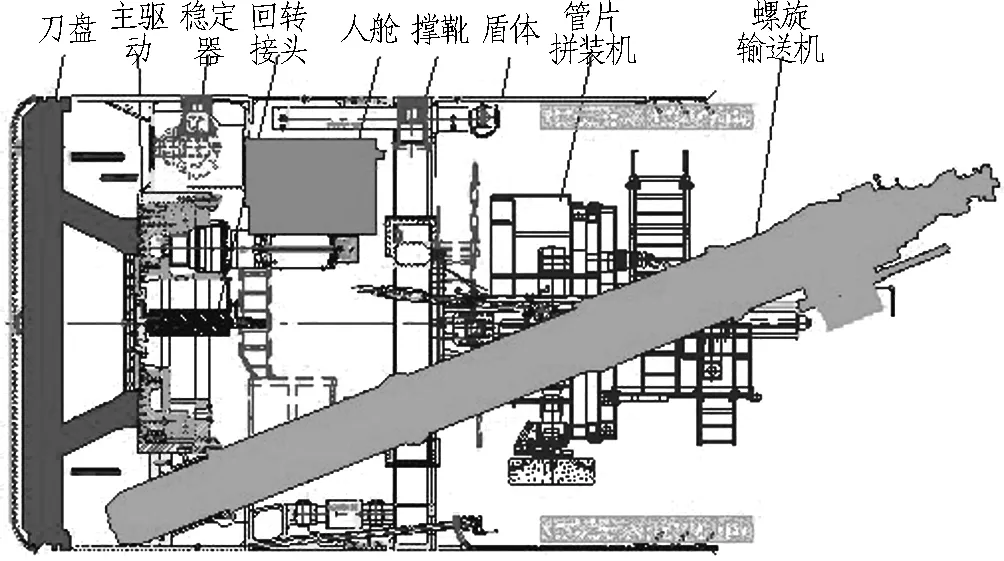
(a) 土压-硬岩双模式掘进机土压模式
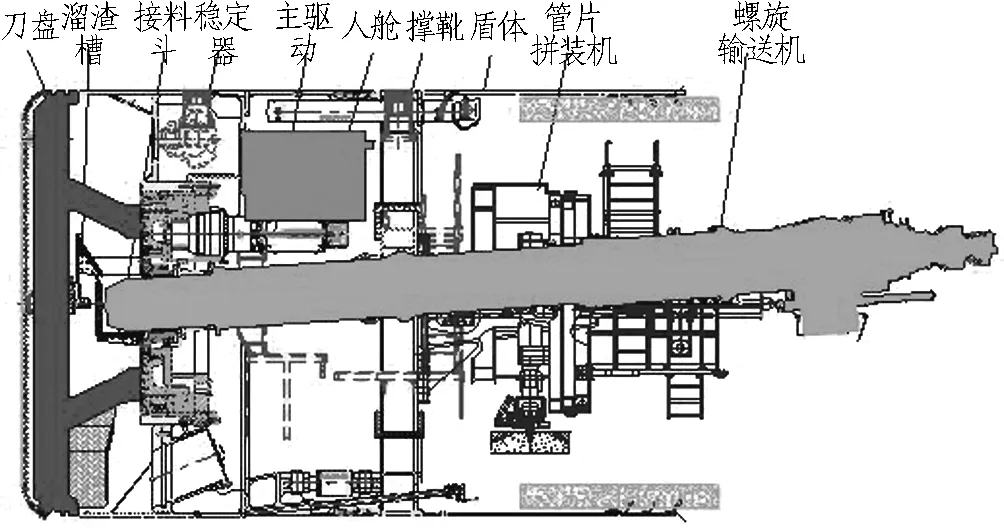
(b) 土压-硬岩双模式隧道掘进机敞开模式
位于深圳轨道交通的某隧道工程项目全长50.34 km,设站17座,平均站间距3.15 km。该区间主要有2大类地层,一类是以强风化角岩、中风化角岩为主的复合地层,适宜采用土压模式掘进; 另一类是以微风化为主的全断面岩石地层,适宜采用硬岩模式掘进。该项目采用直径6.47 m的土压-硬岩双模式隧道掘进机施工,目前设备正在现场组装,即将始发掘进。
1.2 三模式隧道掘进机
三模式隧道掘进机主要是为了应对一个工程项目隧道中,有较多变化地层而设计生产的新型掘进机(见图2)。设备具有土压模式、泥水模式和硬岩模式掘进功能。土压模式状态下使用底部螺旋输送机出渣; 敞开硬岩模式下使用中心螺旋输送机或继续使用底部螺旋机出渣; 泥水模式下关闭螺旋输送机前、后闸门使用泥水环流系统出渣。
采用土压-泥水双模式的隧道掘进机已经发展成熟,成功应用的项目也不少,在此不再赘述。当前正在研发的三模式隧道掘进机开挖直径为7.3 m,现已完成方案设计,制造完成后将用于广东省某核电项目的隧道施工。
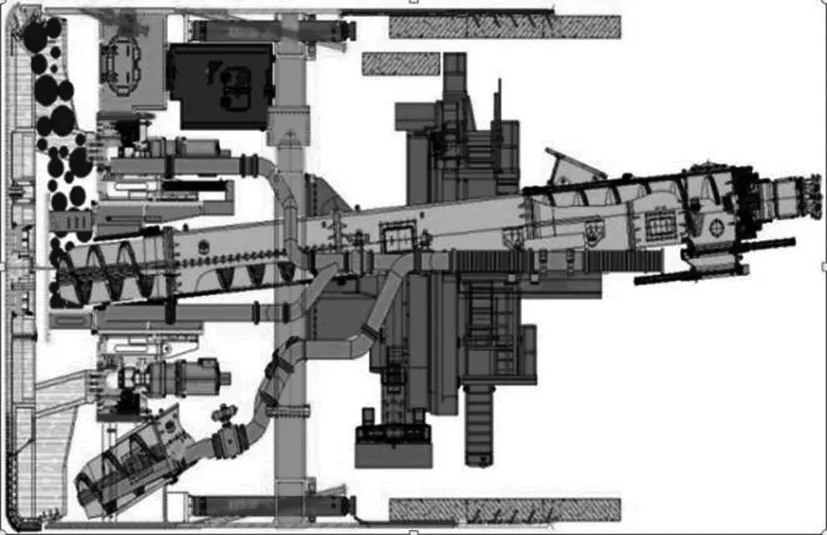
图2 三模式隧道掘进机
2 隧道掘进机功能结构的多元化探索
一般而言,特定结构类型的隧道掘进机具备对应的功能。如护盾式TBM的主要结构为刀盘、主驱动、盾体、推进系统、管片拼装机、后配套系统等,使用管片拼装机来安装管片衬砌,能够应对软弱围岩占比较高的地质。敞开式TBM主要结构为刀盘、主驱动、盾体、推进系统、钢拱架安装机、锚杆钻机、后配套系统等,适合在稳定性较好的硬岩中掘进,遭遇局部不稳定围岩段时可采用安装钢拱架、网片,施工锚杆和喷浆来进行支护。
上述2类不同结构的隧道掘进机各有特点,适合于不同地层。在地质板块挤压、褶皱断裂、构造极其发育的地域,修建隧道工程还会遇到岩爆、断裂带、软岩大变形等极端复杂地质工况,如何安全顺利施工是需要探索的难题。针对这样的地质条件,若采用隧道掘进机工法,可考虑在敞开式TBM(主梁式)的主要结构和功能的基础上,增加管片支护和辅助推进的功能,设计研发一种双结构新型隧道掘进机(见图3)。该双结构机器可以在高地应力岩爆段对作业人员和设备提供防护; 在破碎围岩下能够快速支护,并减少清渣量; 在软弱地层撑靴无法提供推进反力时,采用辅助推进,实现推力转换。这样的双结构TBM是主梁式TBM应对岩爆、软弱破碎地层等风险时,在功能上的补充、加强和完善。
图3 双结构隧道掘进机
3 隧道掘进机作业环境智能感知
虽然隧道掘进机的设计、制造以及应用技术已经成熟,但依然存在一些技术痛点,包括极端工况检测难、突发状况应对难等(见图4)。针对上述问题,工程师们联合相关学者在智能感知、智能决策、自主掘进和智能预警方面开展了系列技术研究。
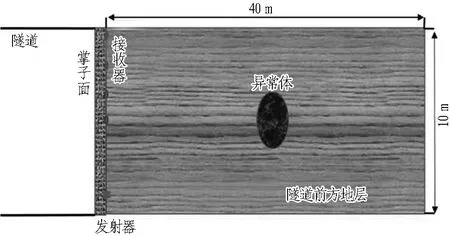
图4 隧道掘进机面临困难地质情况
3.1 超前预报地质感知系统
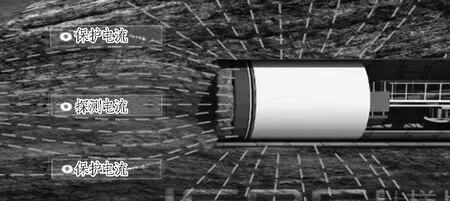
地质超前预报感知系统包括红外线探测系统、震动波探测和激发极化探测等,这些系统可独立配置用,也可以共用在一套掘进机设备上(见图5)。红外线探测系统多用于探测刀盘掘进机前方地质中是否存在水体、水体的大概位置等,是一种定性测定方法。震动波探测装置安装在隧道掘进机的设备连接桥处,通过液压油缸依次激震隧道壁产生地震波,并通过安装在隧道壁上的检波器进行接收,检测出地震波的波形,从而反演出隧道前方地质断层和破碎带等。激发极化探测法则是由安装在掘进机主机、刀盘及盾体上的供电电极、伸缩电极和传导线路组成,供电电极和伸缩电极之间形成电流,通过分析电场分布反演出刀盘前方地质情况,目前多用于地层中水体与水量的探测。

(a) 超前预报地质感知系统组成
(b) 地质感知
3.2 隧道掘进机掘进参数的反馈和掌子面岩土评价
隧道掘进机的刀具在开挖掌子面时,如果掌子面软硬不均或出现局部空洞,可以通过刀具的转速、荷载等状态的变化对掌子面岩土状况给出反演评价。以汕头苏埃通道项目为例,当隧道掘进机由软弱围岩段进入基岩突起段时,刀具转速会增大,先接触基岩的外围刀具为绿色,未接触基岩的正面和中心区域低转速刀具为红色,进而借助转速变化可以对掌子面进行画像评价,如图6所示。
此外,还可以根据刀具荷载变化情况对掌子面进行评价。掌子面地质不均势必引起刀具荷载的变化,通过荷载监测传感器反馈的压力,导入算法模型软件,绿色区域为正常掌子面,红色区域为极软岩或空洞区域,如图7所示。
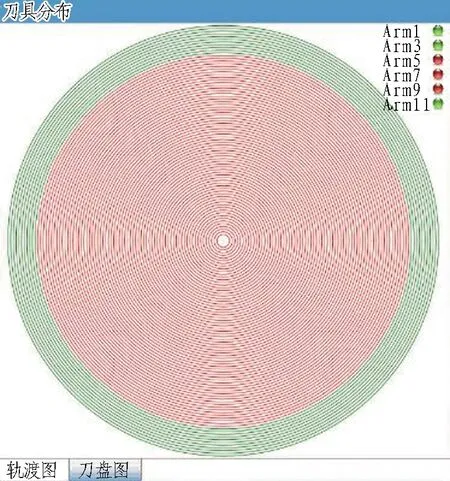
图6 刀具转速反演掌子面软件界面
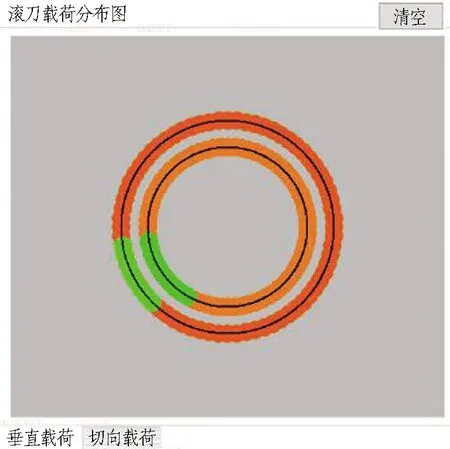
图7 刀具荷载反演掌子面状况软件界面
3.3 出渣管理及围岩评价
渣土识别系统(见图8)采用激光补光器、线阵相机、皮带秤和工控机组成联合检测方法,能实现环境光源自适应补强、扫描精度一致性自动调整、拍摄控制智能判别等功能,通过对获取的高质量渣片图像进行智能分割,识别出大粒径的块状岩渣,给出围岩的完整性评价,为掘进参数调整提供依据。识别系统中当前使用的是一代补光器,属于激发光源频闪灯,它与线阵相机拍摄同步,目前正在开发二代激光式补光器。

(a) 渣土识别系统组成

(b) 系统正视图

(c) 岩渣拍摄照片
通过超前地质预报、掘进参数反馈、出渣管理与围岩评价等系统的研究,建立一整套隧道掘进机地质环境智能感知系统,准确识别作业环境的各种关键要素,是实现隧道掘进机智能化的前提和关键。
4 掘进机状况预测及评价
4.1 刀盘刀具状态检测和评价
通过探索刀具载荷检测方法,开发刀具状态检测新系统,进行刀盘刀具状态的实时在线评估。例如,一套可行的刀盘状态检测系统(见图9),由镶嵌在C型块中的滚刀检测模块、振动传感器、网关和工控机组成,可采用有线和无线2种传输模式,通过网关将检测数据传输至PC,可以实现检测滚刀温度、转速、磨损、应力情况。根据仿真结果择优选取的多个测点,可最大程度地反映刀盘刀具实时状态,然后通过配套专家系统进行刀具状态检测和健康评价。
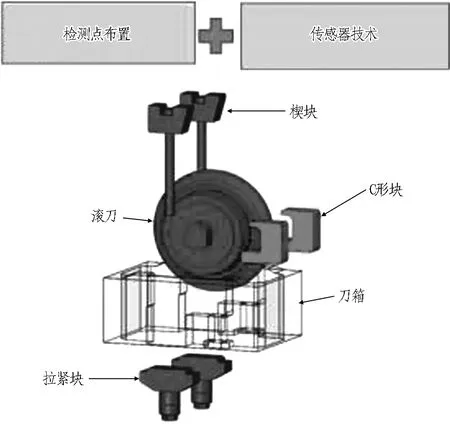
图9 刀具检测
4.2 隧道掘进机主要密封状态预警
由于复杂的地下环境和密封结构形式的固有缺陷,隧道掘进机作业过程中存在漏水、漏泥、漏浆等风险。为了提前对这些风险进行监控,可通过利用传感器并合理地布置检测点,建立起光纤密封监测技术系统(见图10),有效监测主驱动密封、铰接密封、盾尾密封等密封系统腔体内的压力、温度、泄露等状态参数,通过早预警,提前预测密封系统状态,确保掘进施工中的设备密封正常及施工安全。
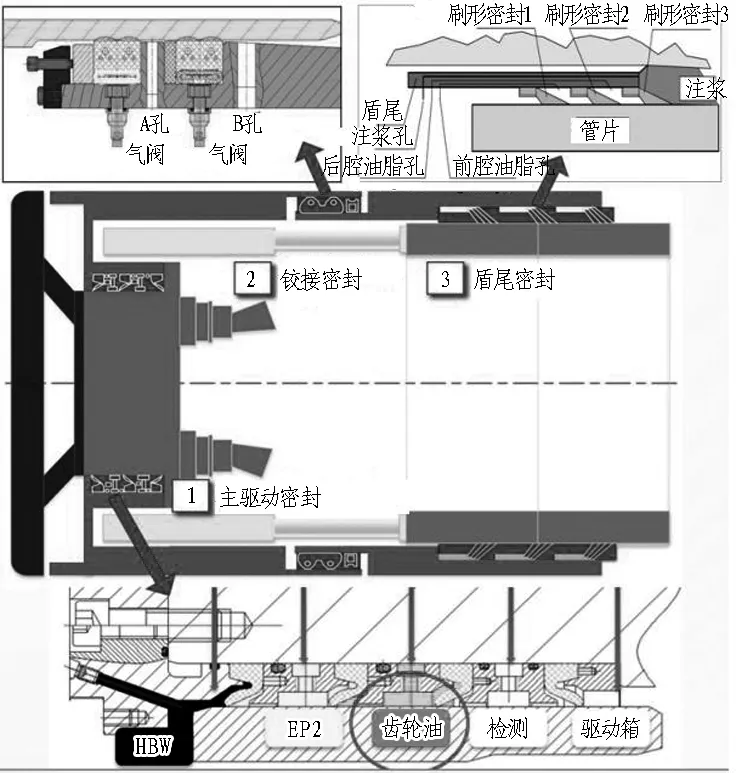
图10 密封系统
另外,通过对隧道掘进机的掘进姿态监测、状况预测、关键密封系统预警等技术的深入研究,建立隧道掘进机的掘进姿态监测及状况评价体系,确保隧道掘进机作业安全、稳定、可靠。
5 隧道掘进机智能决策与智能执行
5.1 智能决策与智能掘进
隧道掘进机开始掘进后,通过上位机记录、保存掘进数据,控制系统中的智能决策模块开启读取数据功能,读取刀盘转速、刀盘转矩、推力、掘进速度等参数。以一条数据含有的所有参数是否在设定边界范围内为判断基准,来定义其是否为有效数据点。在判定过程中自动过滤无效掘进数据,保存并按时间顺序排列有效数据点,形成数据表,按照一定间隔的数据点预测一次掘进参数,并刷新显示端界面输出数据。自动读取有效数据表,并在岩机信息融合与互馈模型中代入相应的掘进参数,从而实时预测掘进参数,供设备操作司机查看,提出相应调整掘进参数建议,从而实现智能决策、智能掘进施工。
5.2 换刀机器人技术研究
在特殊地质工况下,刀具检查更换故障开展困难,需要采取机器人换刀技术。关于换刀机器人技术研究(见图11),主要是针对作业人员难以到达的高压或其他危险环境,通过自动化机械臂开展刀盘刀具的检查与更换工作。该研究中,针对紧凑型伸缩式高负载换刀机器人本体机构设计、兼具重载和微调以及刀具快速拆装功能的末端执行机构设计、换刀过程的视觉导航与末端精确定位技术、电液复合驱动与人机协同控制系统设计等方面展开,据此解决刀具检查更换作业空间狭窄、重载精确定位难、快速拆装等问题。

图11 换刀机器人技术
5.3 钢拱架智能拼装技术研究
在一些断层破碎带或者软岩变形地段,需要高频次采用钢拱架形式支护围岩以保安全,快速高效地拼装钢拱架就成为需要研究解决的课题。在新的方案中,采用运动仿真、可靠制造、试验验证、工业考核等方法,针对钢拱架拼装机器人运动约束及载荷特性分析,钢拱架送料、输送、拼装与紧固等机构设计,以及钢拱架拼装机器人控制系统等展开研究,开发钢拱架支护智能作业系统(见图12)。
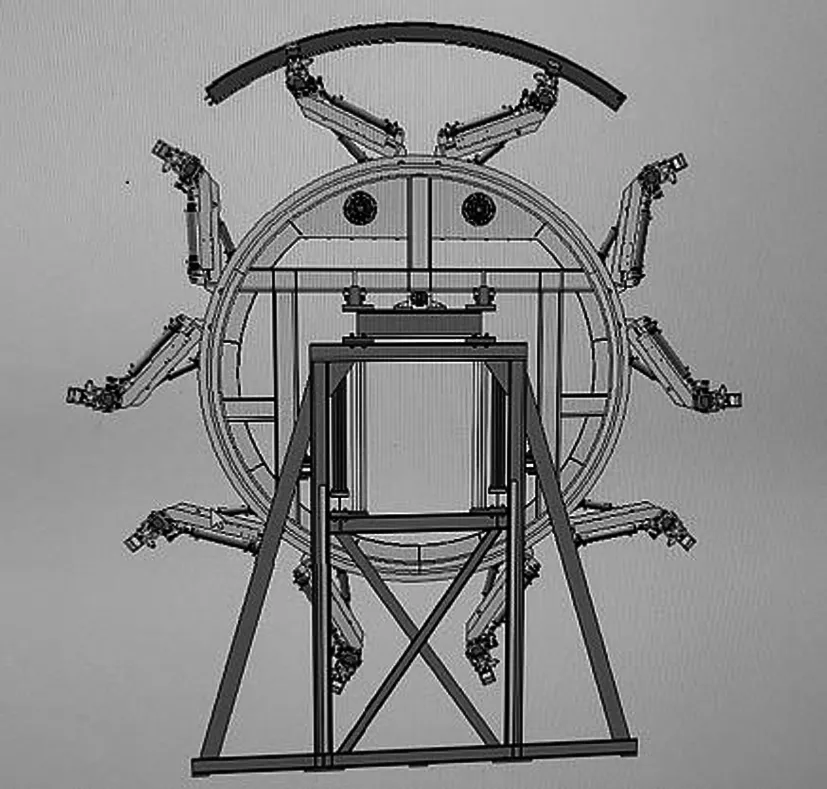
图12 钢拱架智能拼装技术
通过针对隧道掘进机的智能决策、换刀机器人、钢拱架智能拼装等技术的深度研发,建立完善可行的隧道掘进机智能决策及智能执行体系,最终实现隧道掘进机智能化。
6 隧道掘进机的工程适应性推广
矿山法和新奥法是在过去及当下常用的隧道施工技术,大量的工程实践表明这2种工法在长大隧道施工中具有一定的局限性。尤其是在城市施工或者爆破振动管制的工程领域,这2种方法逐渐受到限制。
随着隧道掘进机多模式技术和智能化的发展,隧道掘进机模式转换和生产周期的缩短,隧道掘进机可靠性、安全性的提升,以及处理复杂极端工程情况能力的增强,当前复杂隧道工程的施工风险也得到了有效控制,故而隧道掘进机工法将会逐步突破地质和水文等条件的限制,越来越广泛地适应各类隧道工程的施工要求。
7 结语
隧道掘进机智能化发展着重实现对作业环境进行智能感知,建立隧道掘进机状况评价体系,并实现智能决策与智能执行,以及通过多模式、多功能组合突破地质水文和工况条件限制等。国内及“一带一路”沿线国家基础设施建设市场的巨大需求、行业的技术发展极大地推动着隧道掘进机智能化和适应性技术的进步。隧道掘进机的智能化发展和推广必将进一步推动隧道建造技术的创新与发展。
猜你喜欢
矿山机械(2022年10期)2022-10-20
中国重型装备(2022年1期)2022-02-11
商品与质量(2021年42期)2021-12-03
铁道建筑技术(2021年8期)2021-09-17
铁道建筑技术(2021年4期)2021-07-21
洛阳理工学院学报(自然科学版)(2021年2期)2021-07-14
发明与创新·大科技(2017年9期)2017-09-14
发明与创新·大科技(2016年11期)2016-11-19
科技视界(2016年11期)2016-05-23
中小企业管理与科技·中旬刊(2016年3期)2016-04-22
