智能型太阳能接收系统的设计
2020-10-31 04:20:38王其偲刘建宏
机械制造 2020年10期
□ 王其偲 □ 刘建宏
1.南京理工大学 机械工程学院 南京 210094 2.电子科技大学成都学院 电子工程系 成都 611731
1 设计背景
能源是人类经济社会发展的物质基础。随着社会的发展,人们对于生态环境的保护意识逐渐增强,对清洁能源的研究也越来越受到重视。作为可持续能源之一的太阳能,是未来社会的研究重点。目前,将太阳能作为动力源的产品较多,但由于受到天气的影响,如何提高阳光的利用率是一个关键问题。可见,开发自动跟踪阳光的装置势在必行。近年来,人们在这一领域做了较多研究[1]。许芷毓等[2]探讨了自动独立式太阳能光伏发电系统的可能性。黄和平[3]在硬件层面上指明了研究方向。张应林、黄和平等[4]在软件方面细化了相关程序设计,提高了阳光的利用率,也达到了良好的阳光追踪效果。然而,上述研究装置存在结构复杂、阳光接收效率不高等问题。影响阳光接收效率的因素有设备能量转换率、太阳能接收效率。笔者将提高太阳能的接收率作为设计的方向,并应用红外探测系统中的调制盘和光学系统进行系统改进,设计出以调制盘为核心,高接收率且自动跟踪阳光的智能型太阳能接收系统。
2 系统极限位置定义
智能型太阳能接收系统的设计目标为,在感光条件下,设备可以根据与太阳的相对方位,对阳光方位的数字信息进行调整,达到长时间跟踪阳光的效果,从而使太阳能系统的功率转化率最佳。
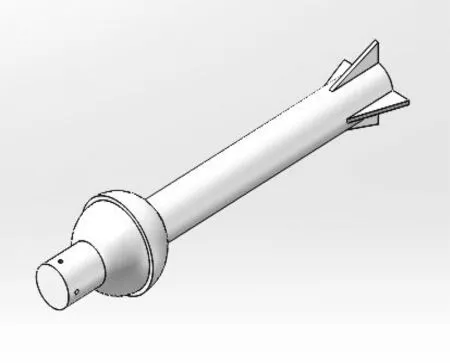
在系统设计时,首先要考虑系统的极限位置,即系统在无光照工况下,如夜晚和阴天时所处的状态。此时,系统板面接收的光照强度所触发的能流信号低于阈值,无法启动智能型太阳能接收系统工作,对应状态称为停机状态。智能型太阳能接收系统如图1所示。在极限位置,智能型太阳能接收系统的控制回路不起作用,光照很微弱,系统保持姿态尽量积累太阳光照,仍具有一定的实用价值。
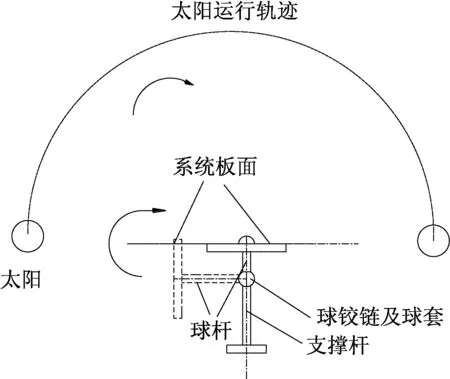
▲图1 智能型太阳能接收系统
3 系统运行原理
对智能型太阳能接收系统运动原理进行分析[5]。这一系统的主要功能是对阳光进行追踪,在太阳升起前和落下后,系统板面分别处于垂直地平线位置,即两个极限位置。在晴天中,太阳自东向西运动,假定这一运动过程在12 h内完成,而从一个极限位置运动至另一个极限位置所经过的角度为180°,由此可以计算得出智能型太阳能接收系统的运动规律为15(°)/h或0.004 2(°)/s,平均运动角速度为7.33×10-5rad/s。可见,系统板面在全天候工作过程中运动角速度很小,可以近似认为智能型太阳能接收系统的工作将系统板面对焦太阳微调。根据系统的运行规律,可以选择舵机类型。通常情况下,舵机必须克服系统板面的重力做功,因此要求舵机具有较佳的承重能力。当然,承重能力较强的舵机,角度调整的精度不高。由于平均运动角速度很小,允许在角度调整过程中存在稍许误差,并且系统板面只需要在大致方位上和太阳方位对准即可,因此角度上的误差并不会影响智能型太阳能接收系统的正常使用。
4 调制盘
在设计智能型太阳能接收系统时,原设想利用日晷的工作原理实现,在测量阴影的同时调整方向,可是实现困难。于是拟应用红外点源制导系统的红外探测原理,通过阳光中的紫外波段来使智能型太阳能接收系统识别太阳特征,并进行跟踪。由此,需要用到调制盘。调制盘的作用在于明确太阳相对于智能型太阳能接收系统的位置,抑制天空背景的干扰。
旋转扫描式调制盘如图2所示[6]。调制盘中黑色部分为防紫外线钢化玻璃,紫外光波能量无法穿过。调制盘上半圆部分是由可透过紫外光波部分和不可透过紫外光波部分交替组成的12个扇形区域,下半圆部分为调制区,等距设置防紫外线钢化玻璃,允许一半紫外光波能量透过。调制盘圆心处为盲区。
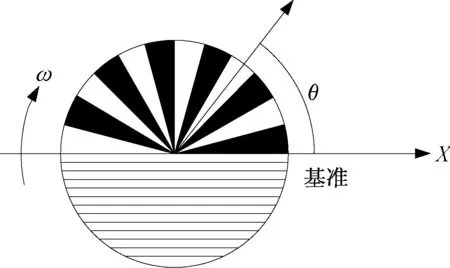
▲图2 旋转扫描式调制盘
目标像点位于调制盘不同位置处,调制盘随陀螺高速旋转,紫外光波能量被切割交替透过和不透过,产生的能流信号,其波形相位反映方位角θ的大小,幅值反映失调角的大小,可见,能流信号波形可以表征太阳相对于智能型太阳能接收系统所处的位置。因此,将能流信号传输至智能型太阳能接收系统,用于对系统板面进行控制。
5 光学系统
光学系统的作用在于接收和汇聚太阳辐射的紫外光波能量,将其聚焦成像于调制盘[7]。笔者设计采用反射式光学系统,太阳辐射的紫外线经过外壳罩投射到主反射镜上,又反射至次反射镜,经校正透镜在调制盘上聚焦为像点。像点的紫外线照射至光敏元器件,由光敏元器件将光信号转换为电信号。反射式光学系统如图3所示。因为光学系统对外界粉尘杂质很敏感,因此应避免粉尘进入内部干扰电子线路工作。外壳罩具有保护内部光学系统和电子线路,阻止外界灰尘杂质进入的作用。外壳罩和系统板面用螺钉连接固定,系统板面和外壳罩整体一起运动。考虑到外壳罩能够从多方向接收太阳发出的紫外光,将外壳罩设计为半球形最为理想。

▲图3 反射式光学系统
6 电子控制线路
智能型太阳能接收系统电子控制线路的原理如图4所示。紫外光进入反射式光学系统,采用光敏元器件输出电信号表征位置误差,由前置放大器放大和变换,经过推挽放大器推挽放大后输出两路信号。一路经闭环回路起到负反馈作用,作为陀螺运动的输入信号。另一路在坐标转换器的作用下成为控制智能型太阳能接收系统跟踪太阳光的内部信号。坐标转换器输出的信号较弱,需要再经过磁放大器放大后转接在智能型太阳能接收系统的传动装置上。考虑到经济性和实用性,将磁放大器输出的信号接入舵机。舵机广泛应用于直升机、汽车、机器人等现代化工业设备中,是首选的角度或位置伺服驱动器,可用于笔者设计的智能型太阳能接收系统,实现角度实时变化,并保持所控制的状态。

▲图4 电子控制线路原理
7 双通道电动舵机
为了使智能型太阳能接收系统能够稳定地转动,采用双通道电动舵机,分别控制系统板面围绕南北和东西方位转动。舵机有一套独特的自动控制系统,磁放大器信号接入舵机的脉冲宽度调制端,通过直流电机、减速齿轮组、传感器、控制电路等装置实现转动。由调制盘切割形成的能流信号决定智能型太阳能接收系统的转动方向和角度。当伺服器发出控制信号时,智能型太阳能接收系统转动,传动轴会运转到指定的位置。当控制信号保持时,位置信息也将同步保持,此时智能型太阳能接收系统保持不动,直到控制信号发生改变。
笔者采用两个MG995舵机,承载质量达20 kg,组合成双通道电动舵机。两个舵机排布在系统板面的横轴和纵轴两个方位上,舵机重力影响导致智能型太阳能接收系统质心和形心不重合,智能型太阳能接收系统旋转调整角度时会受到偏心的影响。为使外壳罩上的受力均匀,在两个舵机对称点处排布两个等质量的物块,以平衡横轴与纵轴方向上的受力。舵机和等质量物块排布如图5所示。
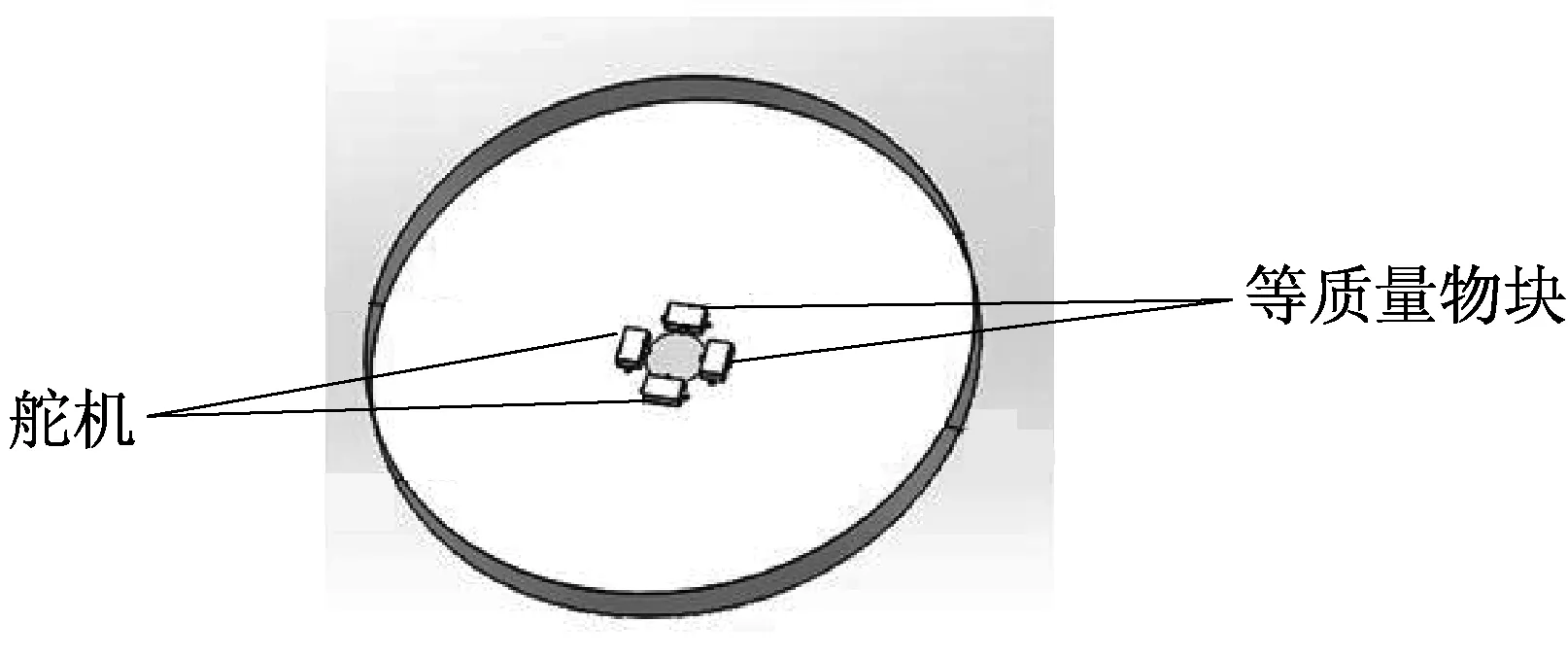
▲图5 舵机与等质量物块排布
8 系统机械结构
为了使系统板面能够在不同时段均对准太阳方位,使智能型太阳能接收系统太阳能接收效率最高,要求控制装置在能流信号作用下控制智能型太阳能接收系统与太阳随动[8]。系统板面运行过程中,虽然运动角速度很小,但是位于极限位置处由弯矩引起的正应力过大,加之系统工作的往复性会引起严重的疲劳断裂,造成传统的机械连接方式明显不满足系统长期工作的需求。经研究后采用球铰链部件进行传动,并且设计了配套的球杆球套装置,如图6所示,使系统板面能够在半球范围内任意转动。能流信号使舵机产生规律的随动偏转,球铰链能够支持各方位偏转[9-10],所受交变应力小,不易导致疲劳失效,并且磨损较小。
▲图6 球铰链与球杆球套装置
为了使舵机固定在系统中而不影响系统功能,笔外形上并非关于输出转动轴对称,舵机的输出转动轴并不位于中心处,经研究后将舵机外壳加宽到62 mm,以达到舵机输出转动轴位于中央的效果,使输出转动轴能更好地与球杆连接,不会出现一侧应力过大造成球杆受力不均而疲劳损坏的结果。舵机外壳和系统板面由螺纹连接,舵机外壳避免过多磨损,且安装便利,并使输出转动轴轴线与短支架轴线垂直相交。
9 结束语
笔者设计了智能型太阳能接收系统,利用太阳发出的紫外光作为识别特征,辅以反射式光学系统和电子控制线路,达到全天候调整系统板面对准太阳的功能,可适用于不同天气情况。
猜你喜欢
汉语世界(2023年3期)2023-09-15 10:23:50
作文小学中年级(2021年12期)2022-01-21 03:20:00
四川冶金(2019年5期)2019-12-23 09:04:48
电子测试(2018年22期)2018-12-19 05:13:02
建材与装饰(2018年44期)2018-11-21 06:32:40
西南交通大学学报(2016年6期)2016-05-04 04:13:06
电线电缆(2016年5期)2016-02-27 09:02:08
中国塑料(2014年1期)2014-10-17 02:46:36
自动化博览(2014年12期)2014-02-28 22:34:26
原子能科学技术(2014年1期)2014-02-28 22:17:20