
基于双平行四边形机构多姿态轮椅的设计
2020-10-29 02:21苏宏伦王思锴胡湘宇苏鹏樊瑜波
中国康复理论与实践 2020年10期
苏宏伦,王思锴,胡湘宇,苏鹏,,樊瑜波
1.国家康复辅具研究中心,民政部康复辅具技术与系统重点实验室,北京市 100176;2.北京信息科技大学机电工程学院,北京市100192
肢体功能障碍者的增多亟需大量的辅助器具,而轮椅等已成为下肢功能障碍者必不可少的生活工具。当前常规轮椅姿态形式单一,仅有坐姿功能;而多姿态轮椅可以通过仰卧姿态实现平躺休息,也可以通过站立姿态进行腿部康复训练或高处取物,克服常规轮椅长时间保持坐姿而造成血液循环不畅的缺点,满足患者使用的多种需求,并且多姿态变换也是智能多功能轮椅的重要功能[1-2]。
有学者研究多姿态轮椅的日常使用情况以及轮椅的适应人群,有助于指导多姿态轮椅的设计与推广应用[3-4]。也有很多研究者进行多姿态轮椅控制研究。美国研究者利用PID (proportion integral differential)控制算法、神经网络控制算法,研发人机融合的协同轮椅系统,提出轮椅车控制系统的国际标准[5-6]。瑞典研究者开展前驱动控制方法、辅助站立电动轮椅车研究,实现具有转弯半径小、能实现后背平躺功能的轮椅[7-8]。也有研究者研究多姿态轮椅驱动机构的运动特性,为系统的速度设计提供指导[9]。在轮椅结构方面,研究者基于两个杠杆平行四边形机构设计了座椅或轮椅的站立单元[10];也有研究者基于连杆机构设计可实现站立及仰卧姿态的多姿态轮椅,通过座面倾斜和脚踏板的内收辅助使使用者站立[1];此外,液压系统与连杆机构组合使用也可用于多姿态轮椅的驱动设计[2]。总体而言,当前大多数多姿态轮椅驱动冗余、结构笨重,价格昂贵,不利于多姿态轮椅的推广使用。研发一种结构简单、轻量化、可靠性高的多姿态轮椅具有巨大的社会需求[11-13]。
本研究拟设计一种基于双平行四边形机构的多姿态轮椅,只需要一个旋转驱动机构,可实现坐-仰卧和坐-站立的三姿态变换,以及多姿态轮椅的轻量化设计,对轮椅机构及力学进行分析与仿真,验证轮椅原理设计的可行性,并可用于指导轮椅的结构设计和优化。
1 材料与方法
1.1 机构设计原理
平行四边形机构是一种应用广泛的双曲柄机构,应用于各个行业[14-18]。有研究者设计双平行四边形直线运动机构,用于核电站反应堆压力容器顶盖无损检查[17]。还有研究者采用三自由度的平行四边形机构实现机械手有空间跨度的自动化上下料[18]。平行四边形机构具有形式简单、姿态变换可靠、运动稳定等优点,其结构形式可用于多姿态轮椅姿态变换机构的设计。
基于双平行四边形机构设计的多姿态轮椅(图1)主要由椅座机构ABCD和椅背机构DEFG两个平行四边形构成。A~F分别为机构铰接点,其中,A点为旋转驱动铰链点,可通过减速装置安装驱动电机。AB杆延长构成腿托,CD杆与DE杆呈一定角度固连,可绕铰链点D旋转运动,DG与GF在确定合适角度后固连。
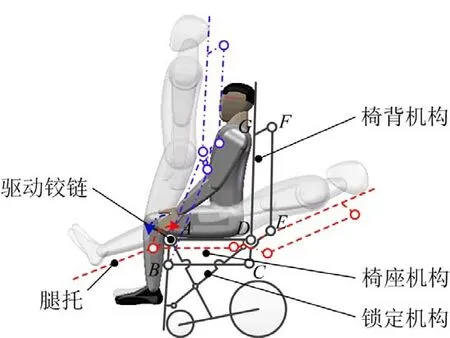
图1 多姿态轮椅示意图
对轮椅的姿态变换过程进行详细分析,实现三姿态变换的过程如图2 所示。其中,(a)图为初始姿态坐姿示意图,图中,h为轮椅高度,l为轮椅宽度,a为腿托的长度,b为椅座长度,c为椅背长度,d为地面到椅座的高度;(b)图和(c)图中,θ为椅背与水平面的夹角,β为椅座与水平面的夹角。
(1) 坐姿到仰卧姿态变换。锁定杆锁定椅座保持固定,腿托解除锁定,驱动铰链顺时针转动,带动椅背向下旋转,依靠平行四边形机构ABCD对边平行特性,椅背与腿托以相同的角速度顺时针旋转,带动身体由坐姿变为仰卧姿态,如图2(b)所示,此时满足

(2) 坐姿到站立姿态变换。锁定杆锁定腿托保持固定,椅背解除锁定,电机驱动逆时针转动,带动椅座与椅背向上旋转,身体由坐姿变为站立姿态,如图2(c)所示,此时满足

对于该多姿态轮椅,存在一个冗余约束,根据平面自由度计算理论,轮椅机构自由度数为1,机构具有相对确定的运动特征[19]。当θ=β=0°时,为仰卧姿态的极限状态,此时椅背、椅座和腿托在同一平面上;当θ=90°、β=90°时,为站立姿态的极限状态,此时椅背、椅座和腿托在同一竖直平面上。
1.2 力学分析
驱动力是反映轮椅运动特性的重要指标之一,对轮椅的姿态变换进行受力分析,如图3 所示。为保障患者的安全,忽略惯性力的影响,设置座椅运动速度上限,采用静力学的分析方法[20],椅背、椅座和腿托承受均布载荷。
轮椅由坐姿到仰卧姿态变换时,如图3(a)所示,q1、q2、q3分别为腿托、椅面和椅背上的均布载荷,此时旋转驱动处的力矩为

式中,ω为转速,t为运动时间。
轮椅由坐姿到站立姿态变换时,可认为腿托部分不受力,因为椅背和底面有一定的夹角,所以会在D点产生力矩FD,此时旋转驱动处的力矩为

2 结果
2.1 动力学计算结果
为满足大部分患者人群的需求,假设人的体质量为70 kg,通过人体肢体在总体质量的占比计算人体肢体质量[21](表1),参照肢体质量进行均布载荷赋值。设置腿托长度a=380 mm,椅座长度为b=400 mm,椅背长度c=635 mm,保持轮椅平稳运动为前提,设置轮椅运动角速度ω=6°/s 为定值,运动时间t=15 s。

表1 人体肢体质量参数表
坐姿变换为仰卧姿态过程中,驱动力矩随着转动角度θ的增大,旋转驱动处的力矩逐渐增大,当t=15 s 时,达到最大力矩M=1.27× 103N·m。坐姿变换为站立姿态过程中,当t=0时,旋转驱动处的力矩为T=2.10 × 103N·m,随着转动角度θ的增大,旋转驱动的力矩逐渐减小。见表2。
2.2 仿真验证结果

图2 机构各姿态示意图

图3 仰卧姿态和站立姿态均布载荷分布图

表2 坐姿到仰卧姿态和站立姿态的力矩变化(×103,N·m)
在机构原理及力学分析的基础上,设计简化的三维验证模型,将三维模型导入Adams 软件中进行分析,对各个铰接点施加约束副,在驱动铰链位置处施加旋转驱动,并对肢体质量载荷进行赋值,如图4 所示。当由坐姿变化为仰卧姿态时,解锁固定副(1),并施加旋转驱动(1),分析驱动力矩的变化情况;由坐姿变化为站立姿态时,解锁固定副(2),施加旋转驱动(2),分析驱动力矩的变化情况。
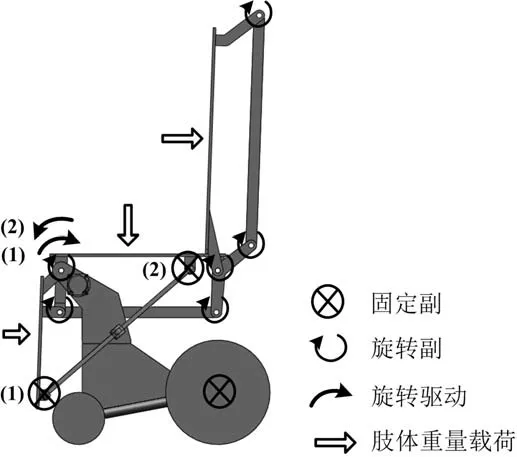
图4 多姿态轮椅模型图
进行多姿态轮椅的动力学仿真,得到座椅从坐姿到仰卧姿态变换过程中各力矩变化,如图5 所示。从图中可以看出随着时间的增加,力矩快速增大,椅背、腿托和水平面的角度慢慢减小,完全躺下时,θ=0∘,驱动端提供的力矩最大T=1.33× 103N·m。
轮椅从坐姿到站立姿态的力矩变化情况如图6 所示,姿态变换开始时力矩最大,此时T=2.24×103N·m,当轮椅由坐姿完全转换为站立姿态的时候力矩最小为0,力矩随着时间和转角增大而减小。
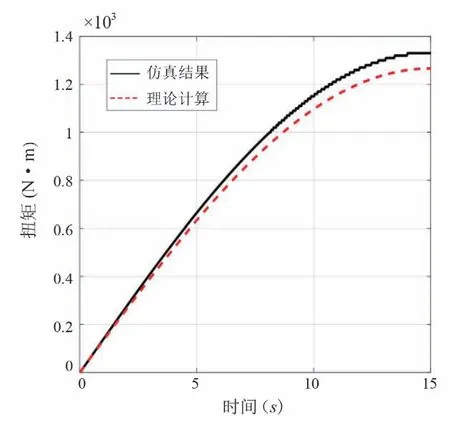
图5 坐姿到仰卧姿态的力矩变化图

图6 坐姿变为站立姿态的力矩变化图
因为仿真中考虑轮椅本身的质量,仿真结果稍大于理论计算结果,但其变化趋势基本一致,验证了力学分析的正确性。可知本机构的动作与需求功能相一致,驱动合理,机构可行,满足设计要求。
3 讨论
本研究基于双平行四边形机构原理设计多姿态轮椅,对其结构原理进行分析,计算轮椅铰接点在姿态变换过程中的力矩,然后利用Adams 进行仿真验证,结果显示计算与仿真的力矩变化趋势一致,验证了理论分析的正确性,对机构的进一步结构设计和优化具有指导意义。本研究所设计的多姿态轮椅的三种姿态可以帮助患者进行移动、休息、康复训练,适应患者的多种需求;运用平行四边形机构使轮椅结构简化,单个旋转驱动正反转可实现轮椅三姿态变换,简单可靠,有利于实现轮椅的轻量化,满足智能多功能轮椅的设计需求。防倾覆性是多姿态轮椅的重要指标[22],下一步研究将结合理论计算与仿真结果对结构的设计进行细化,对多姿态轮椅进行防倾覆性分析及实验。
猜你喜欢
林业工程学报(2022年5期)2022-09-28
小天使·一年级语数英综合(2020年9期)2020-12-16
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
少年文艺·我爱写作文(2019年9期)2019-11-04
电子制作(2019年10期)2019-06-17
求学·文科版(2019年5期)2019-05-23
求学·理科版(2019年5期)2019-05-23
电子制作(2018年19期)2018-11-14
天津诗人(2017年2期)2017-11-29
