基于动态规划算法的电动轿车传动系速比优化
2020-10-22 11:29张苏绪
陕西理工大学学报(自然科学版) 2020年5期
张苏绪,吴 斌
(北京工业大学 环境与能源工程学院, 北京 100124)
随着各国政府对燃油车尾气排放要求逐渐提高,电动汽车成为汽车工业中的主流发展趋势。在设计一款纯电动汽车的过程中,其传动系统的参数设计是一个非常关键的组成部分,该参数的设计结果直接影响到整个汽车自身的动力性和经济性[1-3]。Ruan等[4]对比了电动汽车匹配AMT(Automated Mechanical Transmission)、DCT(Dual Clutch Transmission)、CVT(Continuously Variable Transmission)在相同工况下对整车能耗的影响,其中CVT的能耗优化率最高。由于AMT的传动效率高、结构简单等因素,在电动汽车领域当中得到了广泛的应用[5]。邱立琦等[6]对纯电动商用车匹配单级减速器、两挡变速器或三挡变速器的能耗进行了分析研究,以经济性最优即能耗最小为研究目标对传动系的速比进行了优化,结果表明和单级速比减速器比较,匹配两挡和三挡变速器均能够提高整车的经济性,降低整车的能耗。龚贤武等[7]为了提升能量的利用效率,将动力性能作为整车的限制条件、并将最终目标设置为整车的经济性最优,也就是能量消耗最少,然后利用遗传算法(Genetic Algorithm)优化并设计了一款低功率纯电动汽车的传动系统参数,分别为该电动汽车制定了动力性和经济性的换挡策略,结果表明与匹配单级减速器的方案比较,采用两挡减速器时,不仅提升了该款纯电动汽车的动力性以及经济性,并且还对电机的需求条件进行了一定的降低。刘沛等[8]和冉嘉[9]使用遗传算法对一款纯电动厢式物流车的传动系速比进行组合设计,结果表明设计后在满足动力性能要求的同时,其整车经济性得到了显著的提高。江昊等[10]用动态规划算法进行了低功率双参数经济性优化。高玮等[11]和成岳华等[12]在变速器结构不改动下,设计后的换挡策略使能耗降低明显。Gao等[13]对两挡变速器的一系列速比组合及各组速比进行了优化,适配了最优速比与换挡策略。
上述文献在电动汽车变速箱的匹配与优化方面进行了有意义的工作,但很少有专门对符合我国实际道路情况的工况进行相关研究,并且很少有通过结合车辆的驱动和制动两种工作模式对纯电动汽车变速箱进行匹配和优化。为此,本文采用动态规划算法,根据CLTC-P循环工况下的驱动和制动两种工作模式,对给定的纯电动轿车的传动系进行优化研究。
1 纯电动轿车仿真模型的建立
1.1 整车模型
纯电动汽车行驶过程中会受到风阻阻力、滚动阻力与加速阻力和坡度阻力[14],车辆行驶时的牵引力计算公式及车辆所受各项阻力计算公式分别为
FT=Fr+Fw+Fa+Fθ,
(1)
(2)
其中FT为车辆行驶时的需求牵引力,Fr为滚动阻力,Fw为风阻阻力,Fa为加速阻力,Fθ为坡度阻力,v为车辆瞬时车速,δ为旋转惯量转换系数。
1.2 电池模型
该纯电动轿车的蓄电池类型为锂离子电池,本文中和电池SOC(电池剩余容量)变化相关的影响因素为电池的端电压和内阻,其他影响因素忽略不计,电池模型的计算公式为
(3)
(4)
SOCk+1=SOCk-ΔSOC,
(5)
其中Ik为电池在第k时刻的实时放电电流,Uk为蓄电池在第k时刻的实时端电压,Rk为电池在第k时刻的实时内阻,Pk为电池在第k时刻的实时放电功率,C为该锂离子电池的总容量。
1.3 驱动电机模型
纯电动汽车工作在驱动模式时,其驱动电机的模型为根据驱动电机的效率MAP图,由驱动电机的工作转矩和工作转速查询得到驱动电机相应的工作效率。考虑到驱动电机自身的外特性,当驱动电机的可输出最大扭矩小于驱动电机的需求转矩时,则驱动电机当前工作条件下的输出就是最大可输出转矩。当纯电动汽车工作在再生制动模式时,驱动电机由电动机工作模式转换为发电机工作模式,并且电机发电状态和驱动状态特性基本相同,但考虑到对蓄电池的保护,如果电机工作转速过低,会导致再生制动失效,而电制动力也将迅速降为0[15]。
驱动模式电机模型如
Tm=min{Treq,Tm_max},
(6)
ηm=f(Tm,nm)。
(7)
制动模式电机模型如
(8)
电机输出的最大电制动力由电机的转矩外特性和电池的充电功率约束条件共同确定,其输出的最大制动转矩为
(9)

图1 驱动电机效率MAP
式中Tm为驱动电机的输出转矩,ηm为驱动电机的工作效率,Td为电机输出的制动转矩,Treq为驱动电机的需求转矩,Tm_max为驱动电机的可输出最大转矩,i0为主减速器速比,ig为变速箱速比,nmin为驱动电机再生制动时的失效转速,Pchg_max为电池的最大充电功率,ηchg为电池的充电效率,ηgen为驱动电机制动模式下的发电效率,ω为驱动电机角速度。
驱动电机效率图如图1所示,该纯电动轿车的主要参数如表1所示。

表1 车辆主要参数
根据上述模型和整车参数,应用MATLAB/Simulink软件搭建了电动车整车模型,如图2所示。

图2 电动汽车整车模型
2 基于动态规划算法的传动系速比优化
2.1 边界条件的设计
设计一款汽车的过程中,其传动系统的参数设计是涉及到车辆自身动力性能与经济性能的一个非常关键的组成部分,因此确定车辆传动系统的速比需要考虑多方面因素。其中设计传动系速比的最大取值边界范围需要匹配目标车辆既定的加速性能和爬坡性能,而设计速比的最小取值范围需要考虑目标车辆既定的最高车速行驶性能。
2.1.1 传动系最大速比取值边界的确定
1)由车辆爬坡性能与百公里加速性能要求确定最大速比的下限[16]:
(10)
(11)
取最大速比的下限为
imax≥max{imax_1,imax_2},
(12)
其中Tmax为驱动电机的峰值转矩,v为车辆目标爬坡速度,ηT为传动系统的传递效率,Pt为驱动电机的峰值功率,ta为车辆加速时间,α为爬坡过程的坡道角度,ωb为驱动电机的额定转速,Vf为车辆加速过程的最终车速,δ为整车的旋转惯量,取值为1.07。
2)为了防止驱动轮滑转,由路面的附着系数与驱动电机能够输出的峰值转矩确定传动系最大速比的上限
(13)
其中Fz为作用于驱动轮上的反作用力,φ为路面附着系数,取值为0.8。
2.1.2 传动系最小速比边界范围的确定
1)由车辆得行驶速度达到最高时所受阻力与驱动电机转速达到峰值的情况下所对应的可输出最大转矩来确定传动系最小速比的下限:
(14)
其中Tn_max为驱动电机转速达到峰值时所对应的可输出最大转矩。
2)由车辆最高行驶速度与驱动电机的峰值转速确定传动系最小速比的上限:
(15)
其中uamax为车辆最高行驶速度,nmax为驱动电机的峰值转速。
因为设计需要,取主减速比为3.905。根据上述可计算得到,传动系最小速比imin的范围为1.00~2.05,传动系最大速比imax的范围为2.10~3.00。
2.2 动态规划算法求解
动态规划算法基于Bellman最优控制理论[17],它适用于把一个连续的非线性问题离散成一系列单独的子问题,并以最小代价来求得每个子问题的最优解。本文以车辆传动系统的速比作为问题的控制变量,在满足整车动力性能要求的限制条件下,以整车的经济性最优为问题的解决目标进行优化计算。
将循环工况以1 s为步长进行离散后,可得到N个离散状态下的迁移方程,方程如
xk+1=Fk(xk,uk),
(16)
其中Fk为第k状态下的迁移函数,uk为使第k状态下的子问题得到最优解时的最优传动比,即问题的控制变量,表示为Geark,xk为第k状态下的蓄电池SOCk,即问题的状态变量。
状态变量xk与控制变量uk边界限制条件为
(17)
即
(18)
系统性能指标函数为
(19)
为使系统代价函数得最小值,在每一状态下分别求得使整车经济性达到最优的速比,进而求控制变量的控制序列u*(k),则动态规划递归方程的求解如
J*(x(k),k)=min{L(x(k),u(k))+J*(Fk(x(k),u(k)))},
(20)
且有
J*(x(N),N)=0,
(21)
其中,J*(x(k),k)表示x(k)为第k阶段的初始状态,k=N-1,…,2,1,0。
3 结果分析
使用动态规划算法在图3所示CLTC-P循环工况下分别对传动系速比在车辆行驶的驱动模式和制动模式下进行了优化计算,驱动模式和制动模式下的传动系最优速比分布分别如图4和图5所示。
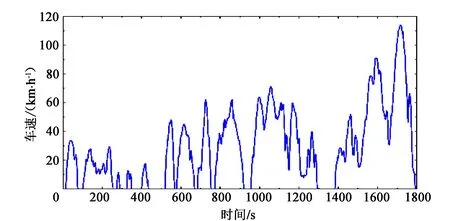
图3 CLTC-P循环工况

图4 驱动模式最优速比分布 图5 制动模式最优速比分布
可以看出当车辆工作在驱动模式时,行驶速度在40 km/h以下,传动系在大速比状态下工作,因为频繁加速过程在车辆行驶速度较低时较多,所以为提高整车的牵引力即动力性需要采用大速比;行驶速度在40 km/h以上,传动系工作在较小的速比,这样可以增大驱动电机的工作转矩并减小驱动电机的工作转速,即使驱动电机的工作点从低效率区迁移至高效率区,进而提高其工作效率,即提升了车辆自身的经济性减少了行驶过程中的能量消耗。车辆工作在制动模式时,行驶速度在40 km/h以下,传动系主要工作在较大的速比,这是由于车辆行驶速度较低时制动使用大速比可以提高驱动电机工作转速,相比于传动系工作在小速比可以使驱动电机工作在较高的效率区,进而提高制动能量的回馈效率;行驶速度在40 km/h以上,传动系主要工作在较小的速比,可以使驱动电机的工作点由低扭矩的低效率区转移到高扭矩高效率区,提高制动能量的回收效率。
对图4中驱动模式最优速比和图5中制动模式最优速比按照大小分别进行叠加,并得到4个使用次数较多的速比以及其各自在同一工况下的使用次数,如图6和图7所示。然后对这4个速比进行再次叠加,进而得到整个循环工况中速比的使用情况。经计算使用较多的速比分别为1.00、1.09、2.00和3.00,其各自的使用次数分别为75、185、174和392。由于速比1.00与1.09这两者数值上比较接近,因此根据其各自的比值权重取均值为1.06。将两挡变速箱二挡速比的取值区间定为1.06到2.00,然后对这二者再进行取比值权重均值为1.44。

图6 驱动模式速比统计 图7 制动模式速比统计
将两挡变速箱的速比设定为1.44与3.00,为了实现各挡间的平稳换挡,参考等比数列对速比进行调节,将三挡变速箱的速比设定为1.06、1.70、3.00,并根据两挡和三挡变速箱速比设计其各自的经济性换挡策略[18],然后分别绘制其各自的换挡曲线图,结果如图8和图9所示。由图可知当车辆匹配三挡变速箱时,其一挡升二挡和二挡降一挡的换挡车速相对于车辆匹配两挡变速箱均有所降低。

图8 两挡变速箱换挡曲线 图9 三挡变速箱换挡曲线
在CLTC-P工况下进行能耗仿真,该纯电动轿车匹配单级减速器、两挡变速箱和三挡变速箱的能耗对比结果和动力性能对比结果分别如表2所示。
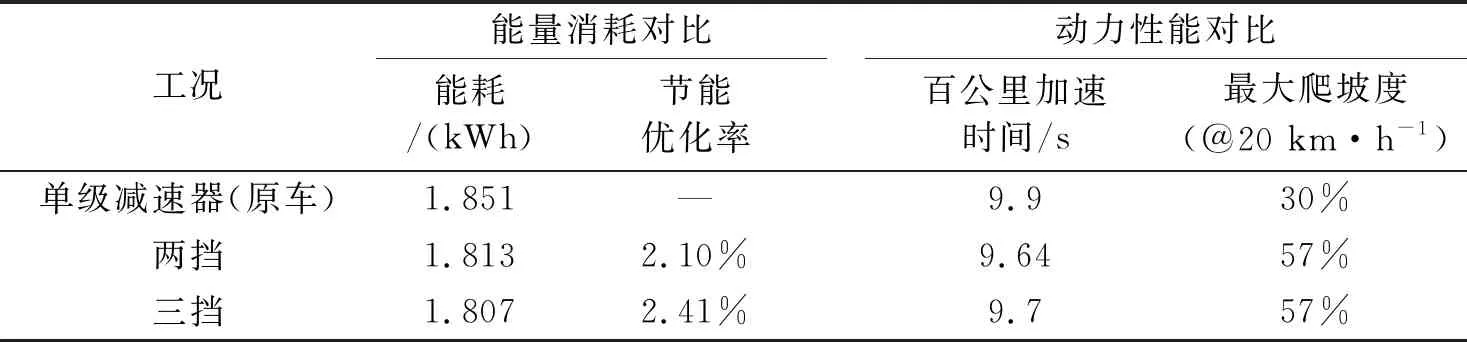
表2 能量消耗和动力性能对比结果
从表2可以看出,在能耗方面,相对单级减速器,两挡变速箱的能耗降低了2.10%,三挡变速箱降低了2.41%,后两者能耗仅相差0.38%。在动力性方面,相对于单级减速器,匹配两挡变速箱和三挡变速箱的百公里加速时间均有所减小,但后两者之间的时间差值不大。同样可以看出匹配两挡变速箱和三挡变速箱的最大爬坡度相对于单级减速器均有所提高,但两者效果基本相同。
考虑到三挡变速箱的体积及成本要高于两挡变速箱,因此为该纯电动轿车匹配两挡变速箱是为最优方案,最终选择的两挡变速箱速比分别为一挡11.71,二挡5.62。
4 结论
(1)本文基于MATLAB/Simulink搭建了纯电动轿车的整车模型,并根据电动汽车的驱动以及制动两种工作模式,使用动态规划算法在CLTC-P循环工况下对传动系的速比和挡位数进行了参数优化。结果表明,在该工况下使用频次较高的速比在三个挡位。
(2)在满足整车动力性要求的情况下,与原单级减速器方案相比,匹配两挡和三挡变速箱在动力性能方面都有所提升、在能耗方面均有所降低,而且两者在动力性能提升及能耗降低的幅度相差不大。在考虑三挡变速箱生产成本较高及其结构设计复杂等因素的情况下,匹配两挡变速箱为该纯电动轿车的最佳选择。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
内燃机与配件(2020年3期)2020-09-10
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
车迷(2017年12期)2018-01-18
制造技术与机床(2017年3期)2017-06-23
汽车工程(2016年11期)2016-04-11
人间(2015年8期)2016-01-09
汽车实用技术(2015年8期)2015-12-26
汽车工程(2014年7期)2014-10-11