基于特殊任务的预警机预警能力评估
2020-10-21 01:37:28张杲旻姜志敏李灵芝
舰船电子对抗 2020年4期
张杲旻,姜志敏,李灵芝,胡 彪
(空军预警学院,湖北 武汉 430019)
0 引 言
预警机是一种大型、全天候、多传感器空中预警与指挥控制飞机, 比地面雷达具有更强的低空探测能力和机动能力,是预警探测的重要组成部分,是实现一体化、信息化作战以及攻防兼备的重要武器装备,其作用已在近几次局部战争中得到充分体现,如海湾战争、伊拉克战争。为充分发挥其对空中和地(海) 面目标的搜索、定位、跟踪、识别和指挥引导等能力,预警机预警能力评估显得尤为重要。随着预警机遂行多样化军事任务的需要,预警机已由传统的空中预警向执行特殊任务转变,特别是远程支援空空拦截作战方面已成为未来研究的热点,目前相关研究多集中在预警机本身预警能力指标量化评估,未与特殊任务相结合,给工程应用和实践带来了一定困难。
论文结合空空拦截作战任务,进行预警机预警能力评估。该方法首先针对空空拦截所需的早期预警、初制导预警、中制导预警和末制导预警共4个阶段,根据目标特性、拦截武器平台,确定各个阶段的额定指标参数要求,额定指标参数包括预警时间和位置;然后计算用于探测4个阶段的4型装备的实际指标参数,实际指标参数包括预警时间和位置;最后根据额定指标参数和实际指标参数,建立证据转化模型,给出预警能力的总体评价。论文主要贡献体现在评估阶段划分及各阶段评估计算方法,面对评估参数的不确定性,提出了加权证据合成,最后进行了仿真验证,能够为理论研究和工程实践提供参考[1-3]。
1 预警能力需求指标
(1) 早期预警阶段
(2) 初制导预警阶段
(3) 中制导预警阶段
(4) 末制导预警阶段
预警时间指标Te4、位置精度指标Se4,根据拦截武器的每次行动任务直接获取。
2 预警能力实际指标
预警能力实际指标由预警机载雷达的探测能力决定。
(1) 早期预警阶段
(2) 初制导预警阶段
(3) 中制导预警阶段
(4) 末制导预警阶段
预警时间指标Tu4、位置精度指标Su4,由末制导预警阶段机载雷达探测性能参数表确定。
3 预警能力综合评估模型
(1) 建立预警能力评估辨识框架
预警能力评估辨识框架Θ={满足,不满足,不确定},提供时间证据和位置证据分别为:
m1i{满足}=ti1;m1i{不满足}=ti2;m1i{不确定}=1-ti1-ti2。
m2i{满足}=si1;m2i{不满足}=si2;m2i{不确定}=1-si1-si2。
其中,i=1,2,3,4。
(2) 证据赋值
采用参数归一化,进行不同预警阶段时间证据、位置证据的赋值计算。
预警证据赋值:
(1)
位置证据赋值:
(2)
(3) 建立预警能力评估可靠性矩阵
预警能力评估过程中有n个证据源同时提供证据参与证据合成,证据辨识框架Θ有3个命题,则所有证据形成3阶证据矩阵,证据矩阵的行可靠性系数为ri,列可靠性系数为lij,则对应证据矩阵的可靠性矩阵为[4-8]:
(3)
可靠性矩阵反映了证据源提供的证据在合成过程中的权重系数以及它们对合成结果的影响程度,将可靠性矩阵引入标准证据理论合成公式中,其方法如下:
依证据源提供的证据给证据辨识框架内各命题分配基本概率赋值,同时建立各命题的可靠度Wij=ri×lij。

mi*(Ak)=βmi(Ak),k=1,2
(4)

(5)
(4) 利用证据组合公式分别对预警时间和预警位置进行证据合成:
m(Φ)=0
(6)
(7)
(8)
(9)
式中:i=1,2,3;j=1,2,3;A1、A2、A3分别为满足、不满足、不确定;B1、B2、B3分别为满足、不满足、不确定。
4 仿真实验与结果分析
为了检验特殊任务的预警机预警能力评估的效果,对系统进行仿真。评估系统中共收集到4个阶段8条证据,分别为时间证据和位置证据,各证据数据相互独立。目标评估框架为Θ(o1,o2),其中o1表示满足,o2表示不满足。各证据基本概率赋值如表1所示。

表1 基本概率赋值

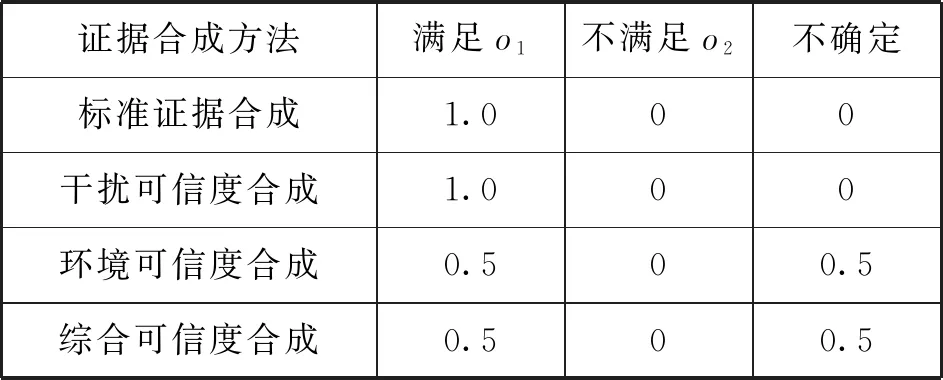
表2 4种情况的评估结果
从4种情况的证据合成结果可以看出:不考虑各机载雷达证据可信度的情况下,满足可信度趋于1,能够直接得出预警能力满足的结果;单纯考虑干扰可信度情况下,结论依然明朗,主要是干扰向量对时间位置影响均等且权值很小;单纯考虑识别率可信度融合和综合可信度融合情况下目标的模糊性增强,与不考虑可信度的融合相比很难判定出正确的结果。这也说明了实际系统中考虑证据的可信度与否对融合结果有很大影响,这也与实际运用是一致的。因此在预警能力评估过程中需要综合考虑各种因素的影响。
5 结束语
对于工作在实际环境下的预警机预警能力评估,其评估有效性除了由机载雷达的性能决定,也由环境所决定。文中不仅给出了评估的阶段划分参数获取,同时采用了将可信度矩阵与证据推理相结合的方法,确保了系统评估的准确性和有效性。证据推理与证据评估结合是评估效果的有效方式,这也是评估技术的发展趋势。由于可信度矩阵的获取还存在一定的难度,这在一定程度上限制了它的全面应用,因此也成为当前研究的一个焦点。
猜你喜欢
四川大学学报(自然科学版)(2023年1期)2023-04-29 00:44:03
榆林学院学报(2022年4期)2022-08-02 14:30:42
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
计算机与生活(2018年8期)2018-08-15 08:24:34
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
理科考试研究·高中(2016年9期)2016-05-14 00:12:18
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
太空探索(2014年1期)2014-07-10 13:41:49
舰船科学技术(2013年12期)2013-08-15 00:51:50