一种脉冲信号到达时间差高精度估计方法
2020-10-21 01:39:32王鑫,陈捷
舰船电子对抗 2020年4期
王 鑫,陈 捷
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
近年来,随着信号处理技术的进一步发展,无源时差定位技术由于作用距离远、隐蔽性好等优点,受到各国的广泛研究和应用,其应用涉及海、空、天等各个领域。相对于有源定位系统,无源时差定位技术能够提高整个无源定位系统在复杂电磁环境下的反侦察、抗干扰、反诱饵等能力,而且还拥有一定的对隐身、低空、超低空飞行目标的侦察能力,有效弥补了有源定位系统在目标识别等方面的不足。在现代战争越来越重视电子战隐蔽性的趋势下,无源时差定位技术拥有着重要的地位。
由于时差测量是无源时差定位技术的关键技术,因此国内外很多专家学者都对此进行了深入的研究,目前已有较多的装备及论文见诸报道。其中提出了很多时差测量的算法,在不同的场景应用下有时必须有针对性地采取不同的时差测量算法才能达到预期的估计效果。本文在分析研究了经典的互相关算法的基础上,提出了一种基于haar小波变换的高精度时差估计方法。
1 互相关算法
1.1 到达时间差(TDOA)测量的模型
TDOA的测量模型可以描述为:2个观察站A、B侦收到同一辐射源信号s(t)后的信号分别为xA(t)和xB(t),其表达式如下所示:
(1)
式中:A和B是信号分别到达A、B两站的幅度,表示辐射源信号s(t)经过空间传输的幅度;nA(t)和nB(t)是A、B站的接收噪声,且均与s(t)不相关;tA和tB为辐射源信号s(t)分别到A、B站的时延。
假设辐射源信号在空间传输过程中信号不产生形变,则式(1)可化简为:
(2)
式中:C=B/A,为A、B站接收到的辐射源信号的幅度比;T=tB-tA,即为A、B两站接收到的辐射源信号的到达时间差(TDOA)估计。
TDOA估计就是通过对接收到的有限信号序列计算两信号的时延差估计。
1.2 广义互相关算法
广义互相关算法是经典的到达时间差测量算法[1],在文献[2]~[6]中有论述,主要因为其他算法均是在广义互相关算法的基础上改进实现的,其主要原理都是根据数字信号处理中有关各信号间的相关性即通过计算其互相关来估计各信号间的时延,其改进算法的主要目的均是提高算法的抗干扰性和适用性。
因为A、B站的接收噪声与s(t)不相关,因此两接收信号xA(t)和xB(t)的互相关函数RxAxB(τ)为:
RxAxB(τ)=E[xA(t)xB(t-τ)]=
CRss(τ-T)+RnAnB(τ)
(3)
式中Rss(τ)为辐射源信号s(t)的自相关;RnAnB(τ)为噪声nA(t)和nB(t)的互相关。
又由于噪声nA(t)、nB(t)与信号s(t)相互独立,因此其互相关RsnA(τ)和RsnB(τ)均为零。由相关函数的性质可知:R(τ)≤R(0),即相关函数R(τ)在τ=0时取得最大值。

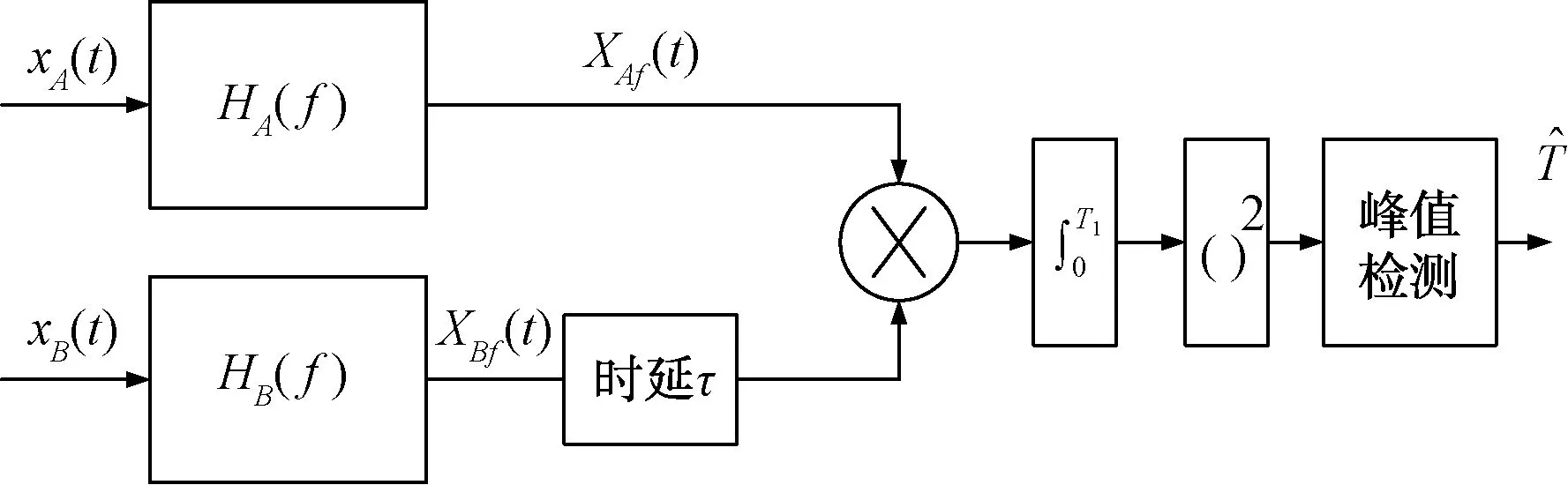
图1 广义互相关算法示意图
由维纳-辛钦(Wiener-Khinchin)定理可知,xA(t)、xB(t)的互相关RxAxB(τ)和互功率谱密度SxAxB(f)关系如下:
(4)
则信号xA(t)、xB(t)的互功率谱密度如下:
(5)
式中:*表示复共轭运算。
因此,广义的互相关函数如下:
(6)
(7)
式中:Ψ(f)为广义化频率权值,是滤波的响应函数表达式。

(8)
(9)
式(9)即为广义互相关函数的算法公式。响应函数Ψ(f)选择不同,广义互相关算法有对应的变化。虽然Ψ(f)能够增加信噪比(SNR),提高互相关的峰值,然而经过滤波后,也使得输出信号与噪声的相关性增加。选择对应的Ψ(f)能够提高算法的稳定性和分辨率。
2 基于Haar小波变换的高精度时差测量算法
对相关函数RxAxB(τ)作离散小波变换,表达式为:
(10)
式中:Ψ(k)为母小波;l为小波尺度;p为平移因子。
因此,对应的离散小波表达式为:
(11)
将式(3)代入式(10)可得:
WTRxAxB(l,p)=WTS(l,p)+WTnAnB(l,p)
(12)
式中:WTS(l,p)为信号s(t)自相关函数的小波变换;WTnAnB(l,p)为噪声互相关函数的小波变换。
然后,解析信号自相关函数小波变换的模值在跳变点附近的变化情况。当p0+l/2≤p≤p0+L-l/2时,即在信号的有限序列内:
(13)
则上式的模为:
p0+l/2≤p≤p0+L-l/2
(14)
当小波变换的区域包括函数的最大值时,可以分成以下3种情况:
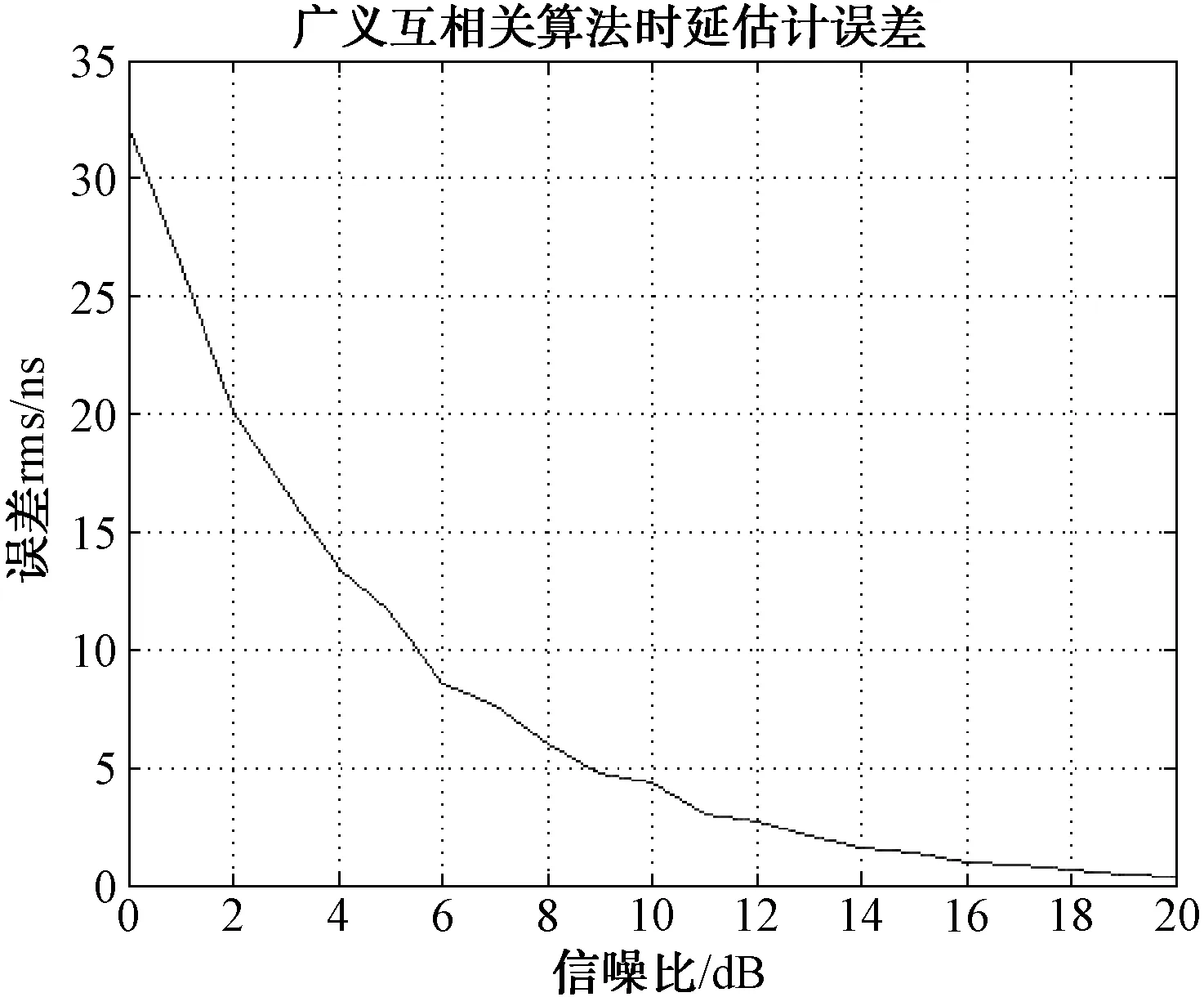
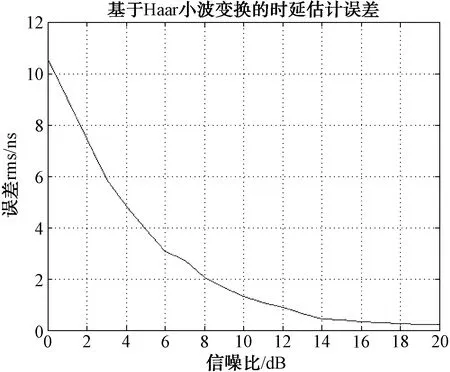
(1) 当p (15) (2) 当p=p0时,则: (16) (3) 当p0 (17) 当Δf≈0时,上述各式成立。当信号的参数估计能够达到该条件时,上述各式可近似为: (18) (19) (20) p0≤p≤p0+l/2-1 (21) 由上面各式推导可知,当小波尺度已知,且信号参数的估计精度较高时,经过上面各式的运算后,相关函数的TDOA值在第1个极值点处得到,即在局部极大值p=p0处,此即为估计的到达时间差。 小波尺度值决定了信号的估计性能。显然,当可以有效估计信号的TOA时,小波尺度值较小将导致平滑滤波的效果降低,同时对噪声的抑制性也降低,最终将导致对信号TOA的估计精度降低;若将小波尺度变大,输出的信噪比(SNR)将随小波尺度的变大而变大,这将有效抑制噪声。因此,当小波尺度l≥2L时,设l=2L+l′(l′≥1),有: p0-l′≤p≤p0 (22) 由上式得,当l=2L+l(l≥1)时,在转折点p0处向左至p0-l′处,得到的局部极大值共(l′+1)个点,此时函数有平顶;当l≤2L时,局部极大值只出现在转折点p0处。所以,当l>2L时,由于存在噪声,将无法判定正确的极值点。因此,最佳的小波尺度为l=2L。然而,实际应用中信号的脉宽未知,其是由自相关检测得到的粗估计值。自相关的粗估计会比真值扩展若干点,所以取: (23) 对TOA的测量,设运算N次,通过计算均方根误差(RMSE)衡量该算法的估计精度。计算公式为: (24) 根据上面的分析可得,该算法仅在信号参数的估计精度高时才能实现;反之,将降低信号TOA的估计。 假设一脉冲信号已经过下变频通道至中频信号,载频为200 MHz,信号脉宽9 μs,采样频率2 GHz,采样时间10 μs,接收两站的间距为200 m。在仿真实验中,定义信噪比的表达式为: (25) 式中:Ps为目标辐射信号的平均功率;Pn为随机噪声的平均功率。 为了验证对基于Haar小波变换的时差测量算法的性能,进行仿真实验,并和广义互相关算法进行比较,每种算法运行500次,实验结果如图2、图3所示。 图2 广义互相关算法随信噪比变化曲线 由图2和图3可知,随着SNR的提高,2种算法对时差估计的均方根误差均逐渐减小;当SNR≤5 dB时,2种算法时差估计的均方根误差均大于10 ns;SNR≥10 dB时,2种算法时差估计的均方根误差开始趋于稳定,基于Haar小波变换算法的收敛速度明显加快,且具有更好的误差精度。 图3 基于Haar小波变换算法随信噪比变化曲线 本文针对脉冲信号的到达时差测量模型展开了研究。在分析研究了广义互相关算法的基础上,本文提出了一种基于Haar小波变换的时延估计算法,通过所提出的Haar小波变换原理提高了其对信号时延估计的精度。仿真结果表明,该算法相较于广义互相关算法估计误差收敛速度更快,误差精度更优。
3 仿真试验与分析
4 结束语
猜你喜欢
数学物理学报(2022年3期)2022-05-25 13:33:00科技风(2021年19期)2021-09-07 14:04:29北京航空航天大学学报(2020年10期)2020-11-14 09:26:16电子制作(2019年13期)2020-01-14 03:15:32中国中医急症(2019年10期)2019-05-21 07:20:28雷达学报(2018年5期)2018-12-05 03:13:16雷达学报(2018年3期)2018-07-18 02:41:20制造技术与机床(2017年10期)2017-11-28 05:20:43电子设计工程(2017年20期)2017-02-10 03:39:23数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38