英语动词聚类在水稻直播机控制中的研究
2020-10-19 06:42梁婧
农机化研究 2020年8期
梁 婧
(河南省财经学校 公共基础教学部,郑州 130118)
0 引言
随着我国智能农业的飞速发展,水稻的种植近年来逐步向精准化、高效化方向迈进,具有不同功能特色的水稻播种机被相继开发设计。与此同时,控制机械也在不断与多学科进行融合,英语语言理解以规范化、目标化特征为支撑,来促进语言用以实现各项控制功能的优化。其中,聚类属性表现尤为明显。动词聚类化指令以相似度为参考点进行数据分析与处理,笔者在水稻直播机控制系统中尝试引入英语语言理解动词聚类机理对直播系统相关部件进行设计。
1 动词聚类机理概述
动词聚类机理通常描述为:在一个涵盖多种不同特征的数据库中,以同特征、类相似为聚类依据,进行价值化关联;该聚类关联在一定的控制算法下进行,通过数据采集信息、过滤去燥、规约判定等多项预处理,并与数据库对比操作,形成合理的信息特征提取,从而完成一系列的聚类动作。图1为语言理解下动词聚类流程简图。其以核心事件为参照,对拟查找的下一个事件进行包容关系、包含关系判定,汇集到核心事件组的动态事件中,按照一定的控制规则进行分类排序,从而清晰化、一致化的动态事件聚类指令完成。

图1 语言动词聚类流程简图Fig.1 Flow chart of the verb clustering in languages。
2 智能控制设计
2.1 动词聚类控制模型建立
将英语语言知识库与水稻直播的控制系统进行有序化结合,建立如图2所示的水稻直播机控制领域英语语言理解动词聚类系统模型。由图2可知:语言理解动词聚类知识库信息与水稻直播控制知识库信息同时植入动词聚类系统与控制执行系统,在用户水稻播种深度与宽度等关键需求信息设定的配合下,实现动词聚类控制化管理。

图2 水稻直播机控制领域英语语言理解动词聚类系统模型Fig.2 Verb clustering system model of English language understanding in the control field of rice direct seeder。
据此,考虑英语语言中的名词与动词所具备的特征属性,以相似程度为评定目标,以-1、0、1分别代表控制参数动作不相似、相互独立、基本相似(相似度为85%以上),建立水稻直播系统的动词聚类控制模型为
(1)
式中A、B—实现聚类算法的向量方程组;
θ—实现聚类算法的向量积。
对该直播控制环节的测试动力、远程遥控及播种深度的功能实现形成如表1所示的水稻直播机控制动词聚类关键参数设置,包含analyze、check、encode、diagnose、turn等顺序动作指令,为直播控制系统平台的协调搭建保证先决条件。

表1 水稻直播机控制环节的英语语言理解动词聚类设置Table 1 Clustering of verbs settings in English language comprehension on the control link of rice direct seeder。
2.2 水稻直播控制软件配置
进行水稻直播机的软件系统控制配置,以基于英语动词聚类的水稻直播控制任务分类原理为出发点(见图3),当1项控制指令需求输入系统,识别两个规定动作的英语语法性质,计算两者的连接距离,进行动词聚类需求分类处理,完成控制目标任务的策略规划。
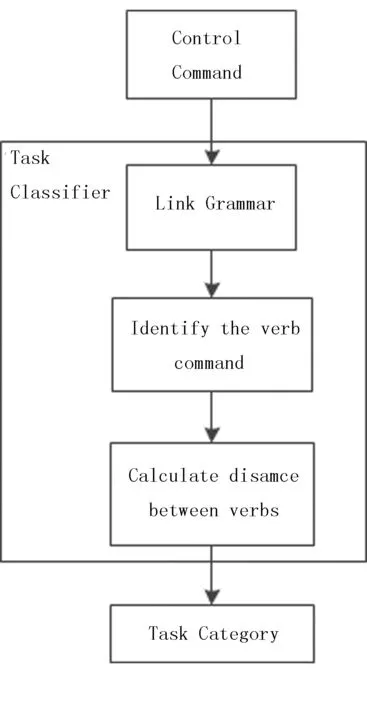
图3 基于英语动词聚类的水稻直播控制任务分类原理简图Fig.3 Schematic diagram of the rice direct seeding control task classification based on English verb clustering。
以英语语言理解为框体,着重建立动词聚类理论下的水稻直播控制定位功能实现,给出核心控制程序片段如下:
void ANEBoZhong::readBoZhongCom()
{
QByteArray GPS_Data =
BoZhongCom->readAll();
if(GPS_Data.contains(“$GPGGA”))
{
GPS_Data.remove(0, GPS_Data.indexOf(
“$GPGGA”));
if(GPS_Data.contains(“*”))
{
QByteArray GPS_GGA = GPS_Data.left(
GPS_Data.index Of(“*”));
GGA_list.clear();
GGA_list<< GPS_GGA.split(‘,’);
}
}
if(GPS_Data.contains(“$GPHPD”))
{
GPS_Data.remove(0, GPS_Data.indexOf(
“$GPHPD”));
if(GPS_Data.contains(“*”))
{
QByteArray GPS_HPD = GPS_Data.left(
GPS_Data.index Of(“*”));
HPD_list.clear();
HPD_list<< GPS_HPD.split(‘,’);
}
if((GGA_list.size()>6&&(HPD_list.size()>15
getBoZhongInfo();
}
bool ANRBoZhong::isBoZhongAvailable(){
return ttue;
}
……
2.3 水稻直播控制硬件执行
以语言理解中的动词聚类为指引路径,将水稻直播的各控制动作从词性角度展开标注并缩写,主要涵盖名动形、介连副等,完成后台软件控制程序可行性结合指令,如表2所示。
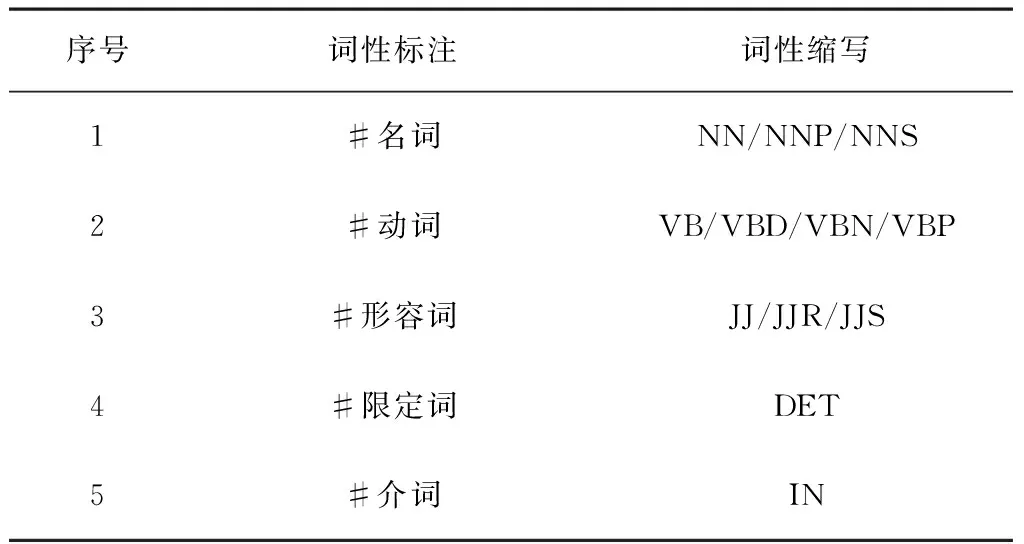
表2 水稻直播控制中的英语语言词汇标注与缩写Table 2 English language vocabulary annotation and abbreviation in rice direct seeding control。

续表2。
当有效的动词聚类数据库形成,水稻直播的各项规定动作指令植入,完成数据准确迅速判定分类是决定输出配置的好坏条件之一。图4为基于动词聚类的水稻直播机控制硬件核心输出配置流程简图。由图4可知:该控制输出主要在PWM机理下实现,通过时钟的配置、频率的分配及动作计数模式的选取等输出稳定的占空比并传送至PWM中心控制模块,在动词聚类的控制机理下进行合理有序输出。

图4 基于动词聚类的水稻直播机控制硬件核心输出配置流程Fig.4 Core output configuration program of control hardware for rice direct seeder based on verb clustering。
针对水稻直播的定位控制环节,在一定的定位控制结构体系(见图5)下进行。

图5 英语语言理解动词聚类下的水稻播种定位控制结构图Fig.5 Structure chart of rice seeding location control based on English language understanding verb clustering。
首先,定位控制装置的各姿态传感器接收到动作信息,将其与英语语言理解动词聚类数据库融合,经深度编译处理的水稻播种动作过程管控信息传递至水稻播种机的导航控制机构,从而控制定位的执行阀组动作,完成定位控制并在监控终端实时显示。
3 水稻播种控制试验
3.1 条件设置
进行以英语语言理解动词聚类为原则的水稻播种的控制试验,选择直播系统的精度、控制接口特性及相关物理特性为主要控制定位指标,进行关键控制指标参数值设置,如表3所示。

表3 基于动词聚类的水稻直播机控制试验指标一览表Table 3 List of control test indexes of the rice direct seeder based on the verb clustering。
给出水稻播种控制试验下的动词聚类模型,如图6所示。根据水稻直播机的相关动作特点,从路径规划、定位导航、视觉感知及自主行驶4个方面,以M、N、J、K为英语动词聚类指令事件控制数量,在有始无终事件动作的内部划分聚类下最终汇集成水稻直播定位控制的有始有终事件信息,并以此为核心设计执行点,进行动词聚类下的直播控制系统试验。

图6 水稻播种控制试验下的动词聚类简易设计模型Fig.6 Simple design model of verb clustering under rice seeding control experiment。
3.2 过程分析
采用尺度恒定化的控制信息特征提取算法,根据输入输出变量参数对比,设定de为动词聚类机理下的输入控制器的横向偏差,Kp、Kd为其输出控制器调节参数,得到如图7所示的横向参数随时间变化对比曲线。由图7可知:在动词聚类融入的水稻直播控制系统设定Kp为定值、Kd不断变化为分析条件,进行内部自适应地调控,可得到较为平滑的响应曲线,响应速度快,不存在超调现象。

a-Kp定值、Kd变化,b-Kp定值、Kd定值。图7 水稻直播控制试验动词聚类模糊参数下的横向参数对比曲线Fig.7 Comparison curve of the lateral parameters under verb clustering fuzzy theory in rice direct seeding control experiment。
经数据处理转换,得到如表4 所示的水稻播种控制试验评价指标对比。

表4 水稻播种控制试验评价指标对比Table 4 Evaluation indexes comparison in the rice seeding control experiment %。
由表4可知:动词聚类应用下的响应灵敏度、系统稳定度与传统控制算法保持一致,动词聚类算法复杂度由之前的87.5%复杂到89.1%,具有可行性且不影响水稻直播控制系统的整体布局;动词聚类的控制调节速度可由之前的90.2%加快至94.6%,综合直播控制定位准确率较传统直播控制可提升5.4%,改善效果明显。
4 结论
1) 以英语语言理解动词聚类原则为切入点、水稻直播机的工作特点为基础,针对水稻直播控制过程进行设计研究。将动词聚类数据库与控制直播的各分解动作信息库合理融合,建立水稻直播的动词聚类理论控制模型。
2) 从系统控制的软件配置及硬件执行角度,进行系统的细节组合,并进行英语动词聚类控制水稻播种试验,结果表明:动词聚类播种控制下的定位准确率和参数数据调节速度均有所提升,系统可行且效果明显。
3) 将英语语言理解动词聚类机理中的核心控制事件分类化与水稻直播机播种定位控制动作在核心特征提取对比算法下大尺度融合,实现水稻直播机的定位精准化提升,为类似农机具的控制优化提供了思路与参考。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-12-27
军事文摘(2021年22期)2021-11-26
导航定位与授时(2020年5期)2020-09-23
文苑(2020年6期)2020-06-22
铁道通信信号(2020年9期)2020-02-06
文苑(2019年22期)2019-12-07
知识经济·中国直销(2018年3期)2018-04-12
电子测试(2017年15期)2017-12-18
雷达学报(2017年6期)2017-03-26
学习月刊(2015年1期)2015-07-11