
基于机器学习的异构感知多核调度方法
2020-10-18 12:58:16夏近伟李建华任福继
计算机应用 2020年10期
安 鑫,康 安,夏近伟,李建华,陈 田,任福继
(1.合肥工业大学计算机与信息学院,合肥 230601;2.情感计算与先进智能机器安徽省重点实验室(合肥工业大学),合肥 230601)
(*通信作者电子邮箱xin.an@hfut.edu.cn)
0 引言
自计算机诞生以来,现代计算机处理系统的发展开始呈现多元化的趋势,规模上实现了从小型的手持设备、笔记本电脑到集群服务器、数据中心的全覆盖。另一方面其应用领域也日趋多样化和复杂化,涵盖了多媒体、信息的加解密、网络服务和云同步、视觉和语音识别、自然语言处理等,这些不同类型的应用程序呈现出不同的程序特性和资源需求[1]。单核处理器受功耗、面积和成本等因素限制发展已经接近极限,为了应对当前应用的复杂性和对高性能、低功耗的需求,包含多个不同类型处理核的异构多核(heterogeneous multi-core)平台[2]已经成为主流的解决方案。
异构多核平台不同于传统的同构多核中处理核比较单一的情况,它具有不同类型的处理核,每种类型的处理核又具有不同的微架构,如:有些处理核是顺序流水线设计,有些是乱序流水线设计;有的处理核具有较大的缓存架构,有的处理核具有较小的缓存架构等。根据指令集架构和微架构的不同可以划分为单指令集异构多核平台和多指令集异构多核平台,其中:单指令集异构多核平台中的处理核具有相同的指令集架构,但具体的微架构实现不同;而多指令集异构多核平台中的处理核具有不同的指令集架构。单指令集异构多核平台主要将高性能高功耗的处理核和低性能低功耗的处理核进行集成,满足多样化的应用程序需求,由于处理核都为同一套指令集架构,因此无需额外的编程环境即可实现协同工作,程序执行点可以任意地进行迁移,如Arm 的Big.Little 架构将两种不同微架构的CPU(Cortex-A7 和Cortex-A5)进行集成,满足了移动领域下用户对高性能和低功耗的需求[3]。多指令集异构多核平台主要以CPU-GPU为代表,CPU-GPU架构利用专门化的图形处理单元对可以高并发处理的程序片段提供加速支持,但该架构下不同类型的处理核之间的协同工作需要编程环境支持,不允许随意地迁移程序的执行点到不同类型的处理核上。本文主要针对单指令集架构的异构多核平台调度方法进行研究,因此下文中没有额外说明的异构多核平台皆为单指令集架构。
异构多核平台通常可以并发执行多个应用程序,并且每个应用程序的行为和资源需求往往也会随时间发生变化。为了适应这种动态执行场景并充分发挥出异构多核处理器的优势,需要解决的很重要的一个问题是如何根据系统需求对应用程序进行动态的资源映射和调度。一个好的异构调度策略需要能够感知异构处理器系统各个处理核之间的异构性和线程行为的不同特性,在对不同映射方案进行高效评估的基础上,动态地进行线程到处理核的映射。这种决定某个线程应该映射到哪个处理核的问题类似于机器学习技术已成功得到应用的推荐系统要解决的推荐问题(比如一些视频点播网站为用户推荐他们可能会喜欢的视频[4-5])。
以神经网络为代表的机器学习(Machine Learning,ML)和深度学习(Deep Learning,DL)技术目前已经在推荐系统、计算机视觉和自然语言处理等领域取得了巨大的成功。尽管机器学习类似于黑盒模型,所学到的输入数据和输出数据的关系通常难以被人们理解,但在输入数据足够多时,机器学习方法常常能提供出色的预测精度。目前已经不少工作尝试将ML 引入到异构多核系统调度问题中并取得了不错的效果[6]。这方面的工作主要有两类:一类工作是仅针对如何对调度方案的性能或功耗等指标构建准确高效的预测模型[7-8],这类工作需要结合其他在线搜索方法构成完整的动态映射和调度方案。另外一类是在第一类的基础上如何设计完整的线程或任务的动态映射和调度方法[9-10]。这类方法除了要构建准确高效的性能预测模型之外,还需要解决运行时随着线程行为等发生变化、何时对线程进行重新映射从而达到最优化运行的问题。目前大部分这类解决方案均基于固定的调度周期(如1 ms)进行映射选择计算,而应用程序的运行行为大多呈现出阶段变化的特征[11],每个阶段的运行行为相对稳定,而且往往持续较长时间,因而,过于频繁的在线映射计算并不一定会改善当前的映射效果,反而会在一定程度上抵消整体映射和调度方案的效果。
本文提出了一种基于机器学习、能快速准确评估程序性能和程序行为阶段变化的检测技术来有效确定重映射时机,从而最大化系统性能的映射和调度解决方案。该方法通过合理选择处理核和线程运行时的静态和动态特征来有效感知异构处理所带来的处理核计算能力和工作负载运行行为的差异,从而构建更加准确的预测模型;通过引入阶段检测技术来尽可能减少在线映射计算的次数,从而提供更加高效的调度方案;通过与Linux 系统使用的经典完全公平调度(Completely Fair Scheduler,CFS)方法进行对比,实验结果表明使用本文调度方法的计算性能能提高52%左右。
1 相关工作
为了充分利用异构多核系统的异构特性和优势来满足应用程序的多样化需求,如何设计和实现应用程序的合理映射和调度方案已经成为研究热点之一。由于调度问题是一个众所周知的NP-Hard 问题,通过手动设计算法或者寻找满足所有给定约束条件的最优解非常困难并且十分耗时,因此,目前研究者们大多基于启发式算法[12-14],在可接受的时间内寻找满足条件的一个近似最优解。文献[1]中作者从优化目标、分析模型、调度决策和算法评估四个方面对异构多核调度所面临的问题与挑战进行了总结和讨论,并对各种调度技术进行了概括。由于本文的关注点在于应用机器学习技术来解决异构多核系统中的任务映射及调度问题的工作,因此接下来主要讨论在进行应用程序映射核调度过程中,使用机器学习模型来优化解决方案的相关研究。
文献[12]中作者针对片上网络(Network-on-Chip,NoC)异构多核平台下的任务映射问题提出了一种基于人工神经网络(Artificial Neural Network,ANN)的解决方案。该方案首先探索任务节点映射到不同位置的处理核的所有可能,之后将对应的映射方式进行编码并交给ANN 来预测,通过统计不同映射方案所能达到的最少执行时间来帮助设计者找到最优的任务映射方式。文献[13]则针对动态多核平台下的映射问题提出了一个基于机器学习方法的解决框架,分别使用K近邻和线性回归算法构建了一个线程数预测模型和一个处理核数量预测模型。在开始映射前,框架首先通过K近邻算法来预测应用程序需要划分成多少个线程,之后再利用线性回归算法来预测每个线程所需要的最佳处理内核数,从而找到最佳的映射方式。
在文献[14]中作者针对由CPU 和GPU 两类处理核组成的异构多核平台,首先对OpenCL程序的静态和动态特征进行了特征分析,之后选择了16 种特征训练了一个可以预测应用程序在映射时需要映射的最佳处理核类型的支持向量机(Support Vector Machine,SVM)模型。在他们后续的工作中,对预测模型进行了进一步的优化,将更多类型的处理核因素纳入了模型的训练过程中,使用了多个SVM 来训练预测模型,其中每种SVM 对应一种类型的处理核,并结合优化目标来确定程序在运行时所需要映射的处理核类型[15]。
文献[16]中详细评估分析了异构多核系统上的动态电压频率缩放行为,并利用凸优化方法来寻找性能与功率之间的关系,最终提出了一种可以预估线程在处理核上运行所产生功耗的预测模型,并基于该模型提出了一种可以优化系统运行时功耗的解决方案。文献[17]中将机器学习技术引入了单应用程序系统的能源优化探索领域。作者使用了5 种机器学习模型来探索不同的配置选项,包括套接字分配、超线程使用和处理器DVFS(Dynamic Voltage and Frequency Scaling)级别等。该文献将调度计算的时间间隔设为5 s,并对调度间隔的大小设置进行了实验探索,实验结果表明越小的调度间隔越有利于把握程序行为变化,但会导致更多的调度计算开销。文献[18]中将异构平台的资源分配问题定义成机器学习问题,提出了一个基于ANN 的动态资源管理器。该资源管理器在运行时监视每个应用程序的执行情况,利用细粒度的资源动态信息(如L2 缓存空间、片外带宽、功率预算、在L1 缓存中读/写命中以及读丢失/写丢失的数量等)预测每个应用程序在不同资源分配方案下的性能表现,从而动态调整资源分配策略,实现对缓存、内存和电压频率等资源的管理。文献[19]中同样利用ANN 技术构建了一个调度模型来帮助优化系统最大的吞吐量。作者提出利用程序的行为特性和处理核微架构信息来为程序寻找最合适的处理核的思想,针对大核和小核两种类型的核心分别构建了两个ANN 模型,利用程序的指令特征(如浮点运算指令、逻辑跳转指令等)和核心微架构参数(如各级缓存的命中丢失率)来训练ANN 模型。作者设定两种ANN 模型每隔1 ms运行一次,预测所有线程在大核(小核)的性能结果,并根据预测结果找出使整个异构平台可以达到最高IPC(Instructions Per Cycle)的调度方案。可以看出这些方法往往将调度间隔设成了固定的大小,没有充分考虑程序运行行为的阶段性变化,过于频繁的调度计算无疑会影响整体系统运行效率。
相对于其他方法,本文在权衡机器学习模型预测准确性、复杂度和在线预测模型开销的基础上,选择了具有一个隐藏层的ANN 作为异构多核系统的性能预测模型。此外为了尽可能降低在线计算的次数,本文引入了阶段检测[18]的思想,通过感知程序线程行为是否发生足够明显的变化来决定是否进行重调度计算,从而尽可能地降低在线调度计算的额外开销,进一步提升系统的性能。
2 基于机器学习的异构多核系统调度方法
本章介绍本文针对异构多核系统所提出的动态映射和调度方法,对于给定的若干个独立线程,调度目标是通过对线程-处理核的动态映射实现异构多核系统的性能最大化。在本文中,计算性能通过每个时钟周期所运行的指令数即IPC 值来衡量,并假设每个核上同一时刻只能运行一个线程[19]。图1 给出了该方法的整体框架,由图可以看出整个异构多核调度方法的输入是一组处于就绪状态的待调度多线程队列,输出是线程到处理核的映射方案,主要由检测应用程序行为阶段变化的阶段检测器、基于ANN 的系统性能预测器和映射方案计算部件三部分构成。具体工作分三个阶段:
1)在每个系统调度周期或者时间片收集异构多核平台上所运行的各个处理核和线程的运行信息(包括IPC 值等相关信息),并将IPC值传递给阶段检测器。
2)阶段检测器通过对比每个处理核在当前时间片和上一时间片的IPC 值来确定其所运行的线程是否发生了行为变化。如果行为变化足够明显,那么调度方法就进入重映射计算阶段来进行新的映射计算,来找到可以使系统性能最大化的新映射方案。
3)在重映射阶段,首先性能预测器基于采集到的线程当前运行信息来对其在不同类型核上的运行性能(IPC 值)进行预测,然后映射计算部件根据这些预测值来决定当前时刻最优的映射方案即线程与处理核的最优映射关系。
此外,图1 中的映射器用于具体部署映射计算部件得到的映射方案。

图1 整体框架Fig.1 Overall framework
2.1 阶段检测
一个程序在其生命周期中可以执行百亿条指令,在执行过程中其行为往往会发生阶段性的变化并且许多行为会重复出现[11]。程序在不同阶段一般具有不同的行为特征,表现为在不同阶段执行指令的类型和数量不同,cache 缺失率、指令级并行度和系统资源利用率不同等[20]。
图2展示了运行SPEC2006 基准程序测试集的gcc 程序时其IPC 值随时间片变化的情况。图2 中的横坐标表示时间片的编号,每个时间片对应的纵坐标表示gcc 程序在该时间片的IPC 平均值。IPC 值相对稳定的时间片区间可以看作一个程序稳定运行的阶段,从图2可以看出程序在运行时其IPC值会随着时间发生阶段性的变化,这种阶段性变化会在相邻两个时间片的IPC 发生明显变化时出现。此外,还可以看到每个阶段横跨的时间有长有短,有的阶段维持的时间跨度甚至多达成百上千个时间片。由于在每个阶段程序行为相对稳定,因此就可以只在阶段发生切换时对现有的系统映射进行调整计算并寻找下一个阶段的最优映射方案,从而大大减少映射计算的次数,有效地降低在线计算的时间开销。
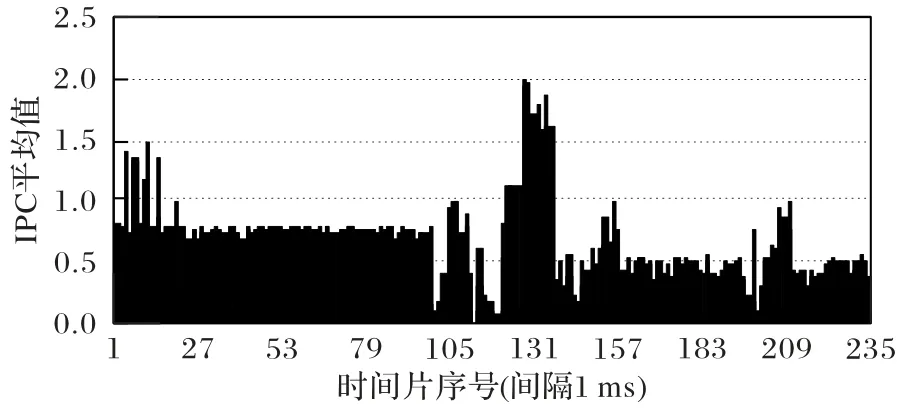
图2 gcc程序的IPC变化情况Fig.2 IPC change of gcc program
由于阶段切换时相邻两个时间的IPC 变化较为明显,因而通过检测IPC 变化幅度就可以检测阶段是否发生切换。为此本文通过在每个处理核上设置一个阶段检测器来完成阶段检测,工作原理是比较在相邻两个时间片所采集到的处理核上所运行线程的IPC 值的变化幅度与所设阈值的大小,如果变化幅度高于所设阈值则认为阶段发生切换。IPC 波动幅度δipc的计算公式为:,

其中:IPCj为当前时间片IPC 值的大小;IPCj-1是上一时间片IPC值的大小。
可以看出,能否找到发生阶段切换的最佳阈值,对于精确捕捉程序运行行为发生变化的时机至关重要。阈值的最优值往往需要根据具体的异构多核平台配置以及对运行的应用程序的实际执行情况进行探索来获得,文献[21]对不同阈值设置方法的检测效果进行了详细的探索和讨论,并给出了参考阈值,故本文参考该文献的设置方法,为检测器设置了大小为50%的全局阈值δmax。类似地,在时间片大小的设置上本文也参考了其他相关方法[22],将时间片设置为1 ms。
2.2 构建ANN预测模型
为了更加直观地阐述本文方法,假定异构处理器平台由两类处理核(即大核和小核)构成,由更多类型的处理核构成的异构平台可以相似地进行处理。本文选择采用ANN 来为两类处理核分别构建性能预测器,预测器的输入是一组包含了线程运行信息和微架构参数信息的特征值集合,输出是当前线程在两类处理核上运行时能达到的IPC值。
2.2.1 模型参数选择
一个预测特定处理核上线程IPC 值的机器学习模型的准确性很大程度上取决于输入参数是否能够准确捕捉到程序的行为特性(如浮点计算数量、访存行为、分支行为等)以及程序运行时所使用的处理核上各种资源的多少(如CPU 资源、Cache 资源等)。本文对各个输入参数利用皮尔逊相关系数(Pearson Correlation Coefficient,PCC)进行相关性分析[23],利用相关系数来寻找参数与性能指标IPC 是否有相关性,从而建立性能预测模型。在经过相关性分析后,本文从18 种参数中选取了和IPC 值关系较密切的10 个指标来构建ANN 性能预测器。这10 个指标包括4 种与处理核心微架构相关的参数,即L1-D、L1-I、L2和L3 Cache 命中缺失率,以及6 种与程序行为变化相关的参数,即浮点加法、减法、乘法、除法、跳转指令和读写内存指令。
2.2.2 ANN预测模型
除了输入参数本身以外,模型复杂度的高低和运行模型所产生的硬件开销等也是评估模型好坏的重要指标。由于ANN 属于计算密集型算法,随着网络层数的增多,网络结构会越复杂,进而带来更多的硬件和在线预测开销等问题。因此,在综合权衡模型时间开销和精确度以后,本文最终使用了三层的神经网络来构建ANN性能预测器。表1给出了本文最终确定使用的网络模型的各项参数,接下来分别介绍这些参数的选择依据和考虑。
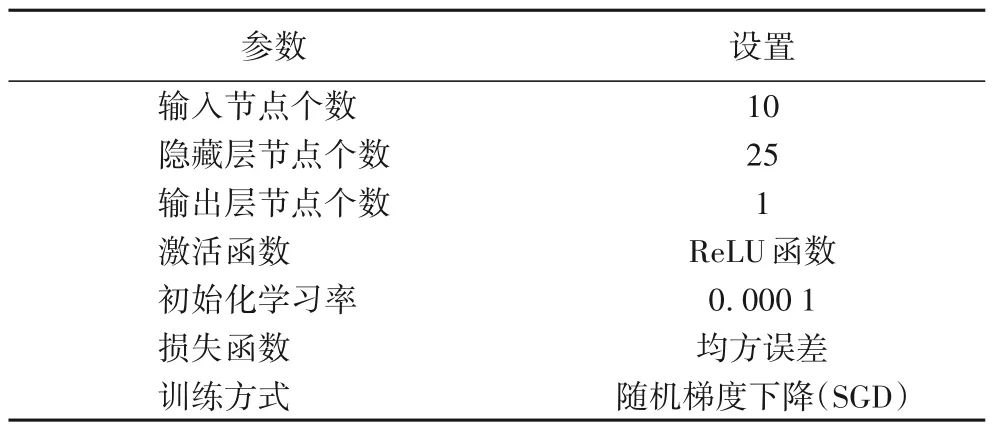
表1 人工神经网络参数设置Tab.1 Parameter setting of artificial neural network
ANN 的输入层由10 个神经元节点组成,输入层的10 个节点分别负责接收10 个输入参数,在计算完毕后,输入节点会将计算结果通过激活函数传递到隐藏层。理论上隐藏层节点的个数越多,ANN 性能预测器在训练数据集上的预测效果就越好,但隐藏层节点个数超过一定数量会导致过拟合现象的出现。本文参考文献[24]中所提出的经验公式来确立隐藏层节点的个数,即采用经验公式2n+m,其中n为输入节点的数量,m为0~10 的正整数。在对m的数值进一步进行实验分析后,选择使ANN 性能预测器在训练集上获得最好效果的m值(即5),因此最终本文选择的隐藏层节点个数为25。隐藏层的每个神经元节点会接收所有的输入节点结果,在对其完成计算后通过激活函数传递到输出层。输出层利用所有隐藏神经元节点的计算结果得到最后的输出值(IPC)。
在激活函数的使用上本文选择了ReLU(Rectified Linear Unit)函数,该函数不含任何复杂的运算(如指数级运算),只拥有很小的计算量,可以最大限度地降低异构多核调度中产生的在线预测时间开销。同时,ReLU函数在训练过程中也可以有效避免梯度饱和问题,防止训练失败的情况出现。详细的ANN连接结构如图3所示。
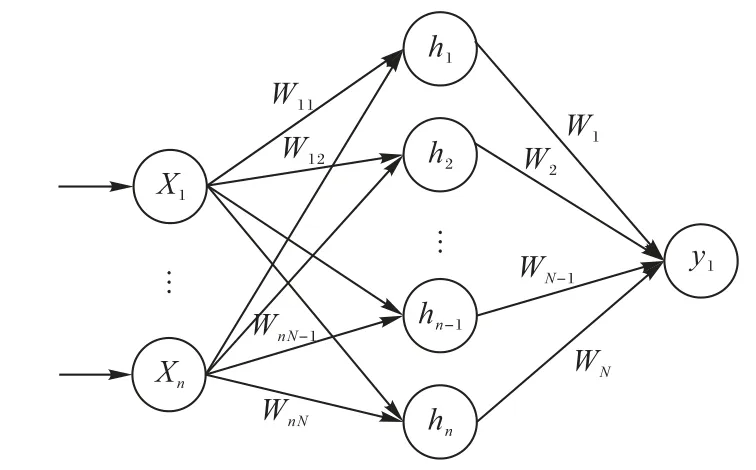
图3 人工神经网络模型Fig.3 Artificial neural network model
ANN 性能预测器属于机器学习中的回归模型,因此本文使用回归模型常用的均方误差(Mean Squared Error,MSE)损失函数来对ANN 性能预测器进行训练。使用MSE 函数训练ANN性能预测器时,整个ANN的梯度会随MSE值的增大而增大,而MSE值趋于0时网络的梯度则会减小,因此采用固定的学习率即可保证整个网络可以有效地收敛,并在训练结束时取得良好的预测效果,所以本文将学习率设置为固定的0.001。
2.2.3 数据集获取和预处理
本文使用Sniper工具来获取用于训练大核和小核ANN性能预测器的两个数据集。为此,本文分别建立了两个独立的处理核平台,其中训练大核性能预测器的处理核平台只拥有一个大核,另一个用于训练小核性能预测器的处理核平台只拥有一个小核。通过在两个平台上完整执行基准测试集SPLASH-2中所有应用,并收集每个时间片的相关输入参数和输出标签等数据来获得原始数据集。
由于收集到的原始数据中各输入特征的单位或数量级不一致且相差较大(如每个时间片程序执行指令条数多达成百上千条,而cache 命中缺失率常常远低于1),因此直接用原始数据对程序的IPC 值进行预测的话,数量级较大的各种指令特征会严重影响预测效果。此外,程序每个时间片在大核上执行的各类型指令的条数与小核上执行的指令条数有时也会有1~2 个数量级的差别,所以在大(小)核上收集的输入参数难以直接用来预测线程在小(大)核上的IPC 值。因此本文对收集到的原始数据作了以下标准化处理:
1)针对6 种表示程序行为的指令特征,本文用不同类型的指令条数占总指令条数的比率来替代原来的指令数量。
2)针对全部10种参数,本文对其进行了Z-Score归一化处理以使数据集更加符合正态分布。具体计算公式如下:

其中:μβ和分别是训练集的均值和方差;ε是一个用来避免为0的常量,本次实验中将ε值设置为0.001。
2.2.4 预测器评估
在利用Sniper 和基准测试集SPLASH-2 得到所需要的原始数据集后,本文利用该数据集来对ANN 性能预测器进行训练和评估。首先,将经过预处理后的原始数据集按照机器学习模型训练和评估常用的划分方法将数据集以7∶3 的比例进行划分,其中的70%用来训练模型,剩下的30%作为测试集来评估ANN性能预测器在未知数据上的预测效果。
图4 显示了本文训练的两个ANN 性能预测器在SPLASH-2 基准程序测试集上的表现情况,MSE 值越低表示ANN 性能预测器的效果越好。从图4 可以看出:小核性能预测器和大核性能预测器在barnes 上表现最好,MSE 值分别为0.010 8 和0.013 7;而在volrend 上两者表现最差,分别为0.750 6和0.936 4。总体上,在8个基准测试程序上两者分别达到了0.155 4 和0.228 4 的平均MSE 值,均具有较好的预测效果。
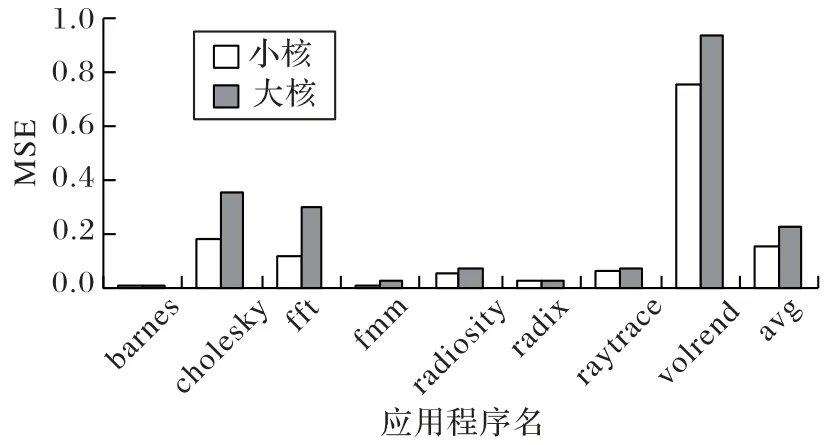
图4 ANN预测器的均方误差Fig.4 MSE of ANN predictor
2.2.5 映射方案计算部件
由于ANN 性能预测器的输出结果是IPC 值,并不是一个完整的映射方案,因此本文设计了一个映射方案计算部件来找出最优的映射方案。该部件的主要功能是利用ANN 性能预测器给出各个线程在大(小)处理核上的IPCbig(IPCsmall)来对所有可行的映射方案进行评估,找出使所有线程总IPCsum的最大的映射方案。
假设异构多核平台需要映射的线程数量为M,其中N个需要映射到大核上,另外M-N个线程映射到小核上,则存在的映射方案数量一共为。映射方案计算部件每次选择N个线程的IPCbig和另外M-N个线程的IPCsmall相加得到本次映射的IPCsum,在得到个IPCsum后,完成对所有可行映射方案的探索,并将IPCsum值最大的那种映射方案输出给映射器。映射器在得到映射计算部件给出的映射方案后完成线程到处理核的部署。
3 实验评估
3.1 实验设置
本文选择采用业界常用的Sniper[24]作为数据采集和实验评估的工具,Sniper 是一个用于处理器架构设计验证的模拟器,既可以用来模拟同构多核架构系统,也可以模拟异构多核架构系统的运行。该模拟器主要支持x86 指令集的处理核,目前最新版本也加入了对RISC-V 指令集的支持。为了实现良好的仿真效果和更快的仿真速度,Sniper 选择了基于时间间隔模拟的方式来获得处理核运行时产生的各项指标并对设计方案进行评估。
由于本文主要针对单指令集架构下的异构多核平台,即同一平台下的多个处理核具有相同的指令集架构但各自有不同的微架构(如处理器主频、流水线深度、缓存系统差异等)的处理核,因此在本次实验中,本文基于Sniper搭建了一个由大核和小核两种类型的处理核组成的异构多核平台,其中大核指微架构的实现更加复杂,性能更高的处理核,而小核指的是微架构的实现相对简单,功耗较低的处理核。该平台是一个典型的四核异构非对称多核处理器,由1个大核和3个小核组成,详细配置如表2 所示。1 大3 小的四核架构是移动平台领域常见的处理器配置方式:1 个主打高性能的大核能在可接受面积和功耗的前提下提供最高的单核性能,而3 个小核则可以在做到在更小的面积和功耗下提供一定的多核性能,从而在多个常见场景下拥有性能和功耗的优势。此外,由于cache大小、时钟频率等参数既影响程序的性能执行结果又影响了资源争用和线程同步等情况,为了精确验证程序在不同核心上执行的性能差异原因,本文采用了相同的时钟频率和三级cache 缓存架构,其中L1 Cache 为256 KB,L2 Cache 为512 KB,共享的L3 Cache 大小设置为8 MB。大核和小核的指令集架构均基于Intel Nehalem x86架构,且处理核的主频均为2.66 GHz。在核心的微架构配置上,本文为大核和小核均设置了大小为4的发射宽度,但是大核拥有128的指令窗口大小和长度为48 的读取队列,与之对应的小核的指令窗口大小和队列长度分别为16和6。

表2 异构多核处理平台配置Tab.2 Heterogenous multi-core processor configurations
本文使用SPLASH-2 基准测试集作为实验用的程序集合。SPLASH-2基准测试集由一系列多线程程序组成,多应用于高性能计算和图形多媒体程序的测试。同时,Sniper 集成了SPLASH-2 基准测试集的已编译版本,可以对其下所有应用程序在实际硬件平台上的运行情况进行准确模拟,因此利用Sniper 和SPLASH-2 基准测试集可以全面综合地对异构调度方法进行评估,并测试调度效果。在对比实验中,本文选择了Linux默认的CFS调度器,该调度器已被广泛应用在各种多核处理系统中。
3.2 实验结果
在实际的调度场景中,调度器需要面临各种已知或未知类型的程序并对其进行调度。由于基准测试集中包含的程序涵盖了大多数的程序类型,因此为了对调度器进行全面的评估本文将SPLASH-2 基准测试集进行了如表3 所示的分组。分组原则为使每组程序中既包含MSE 值较低的程序,也包含MSE 值较高的程序,并通过进行多组实验来尽可能充分地模拟调度器在真实环境下的复杂调度场景。为了保证实验评估结果的准确性,本文在Sniper 下分别实现了异构调度器和CFS 调度器,其中CFS 调度器的实现方式参考了Linux Kernel 2.6.33 所实现的版本[25]。在执行方式上,每组的4 个多线程程序会在4 个处理核上循环执行直到该组的所有程序的所有线程都至少执行完一遍为止,从而尽可能真实地模拟现实场景下的程序执行行为。
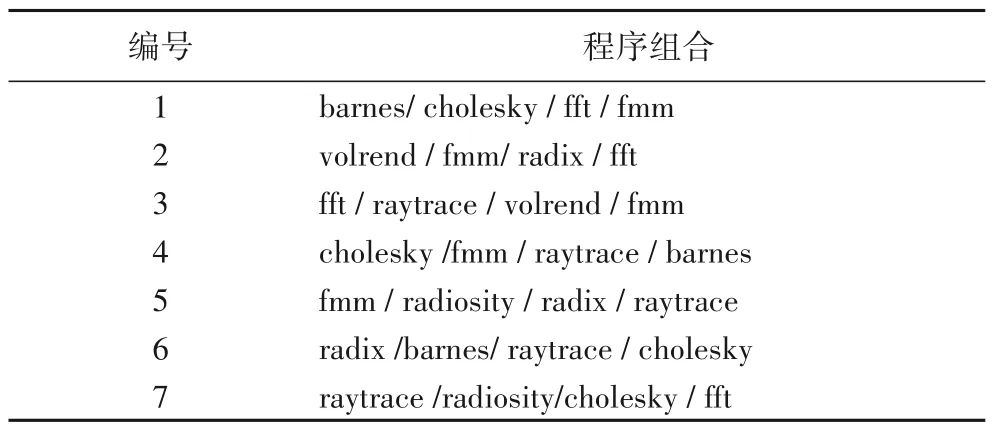
表3 实验用的程序组合Tab.3 Combination of programs in experiments
图5 给出了使用本文的异构调度方法在Sniper 搭建的四核异构平台中分别运行表3 中各组应用程序的实验结果,其中横坐标表示不同的程序组合编号,纵坐标是本文提出的异构调度方法与Linux 默认的CFS 相比所实现的IPC 加速比。从图5可以看出,本文所构建的调度器相比CFS在组合2上加速比最低,在组合6 上加速比最高,分别是1.12 和2.49,在7种组合下平均实现了1.52 的加速比。根据图4 中ANN 性能预测器在SPLASH-2 基准测试程序上的表现可知,由于组合2含有MSE值最高的volrend和fft,因此整体的ANN性能预测器预测效果较其他组合相比最差,所以达到的IPC 加速比最低。同理,组合6中各程序的MSE值整体比较接近,ANN性能预测器的整体预测效果较好,因而达到了最高的IPC加速比。
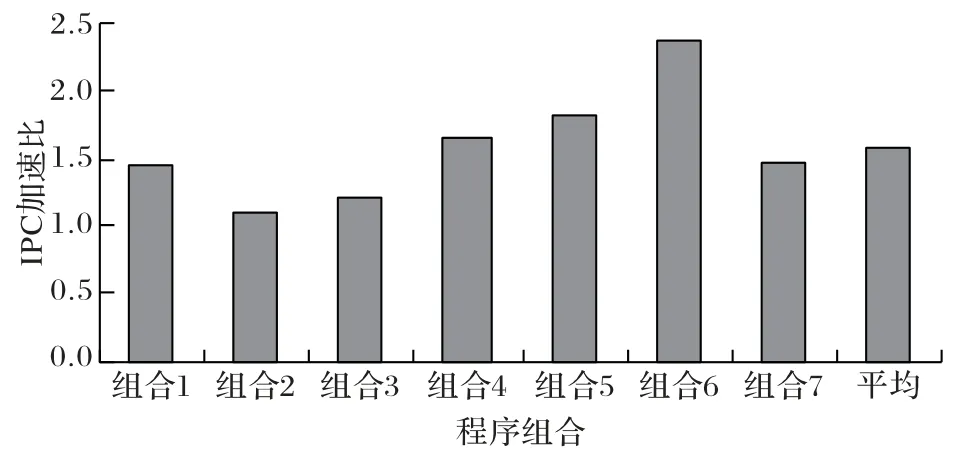
图5 本文异构调度方法的加速比Fig.5 Speedup ratio of proposed heterogenous scheduling method
图6 给出了本文所提出的异构调度方法与CFS 调度器在Sniper 所搭建的四核异构平台中分别运行表3 中各组应用程序的CPU 资源利用率(CPU 处于运行状态的时钟周期数与总的时钟周期数的比值)的情况,其中本文方法的平均CPU 核资源利用率为93%,高于CFS 的平均CPU 核资源利用率(85%)。结果表明本文提出的异构调度器能够更加充分地利用CPU的资源。
通过实验数据可知,相对于利用虚拟运行时间大小来分配处理核资源的CFS 调度算法,本文所提出的异构调度方法通过感知线程行为的变化和不同时刻下线程对处理核资源的需求,将线程及时分配到最适合其运行的处理核上,从而能够更好地发挥异构多核所带来的优势,获得更好的调度性能。
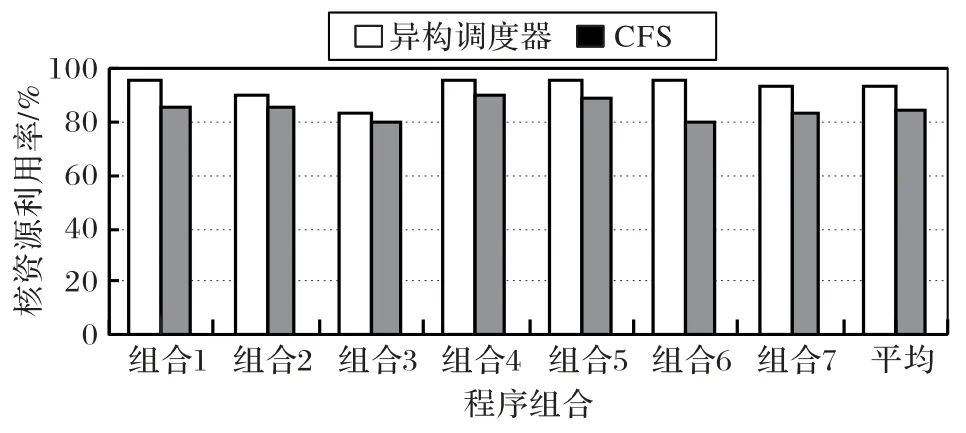
图6 本文异构调度方法和CFS的核资源利用率Fig.6 Core resource utilization rate of proposed heterogenous scheduling method and CFS
使用ANN 性能预测器所带来的额外开销主要由预测器指令的执行时间开销和为了存储模型参数所带来的额外存储开销组成。在不考虑各级缓存命中缺失率、数据是否对齐等因素的影响下,一个ANN 性能预测器每次执行所需要的浮点乘法指令条数约为250条、浮点加法指令为26条、访存相关的指令约为70 条,而存储模型参数所需要的内存约为1 104 B。通过查询Intel 指令手册[26]可知,理想情况下运行上述指令所需的总指令周期数最小为1 160,因此在4 个处理核上分别运行4个ANN性能预测器所带来的总消耗为4 640个时钟周期,内存开销为552 KB。假设CPU 时钟频率为1 GHz,当时间片为1 ms时,每个时间片有1×106时钟周期,运行ANN 性能预测器的时间开销约为0.5%。而本文提出的方法整合了阶段检测器,此时ANN 性能预测器往往需要经过往往成百上千个时间片才会被调用,因此引入ANN 性能预测器所带来的实际额外时间开销会更低,甚至可以忽略。
综上,相对于经典的CFS调度器,本文所提出的调度程序引入了阶段检测机制和ANN 性能预测器来帮助感知线程行为变化并为其选择更合适的处理核,最终在基本没有带来明显额外在线计算开销的前提下,获得了更好的性能收益。
4 结语
本文提出了一种基于阶段检测和机器学习预测模型的异构多核映射和调度方法:一方面通过阶段检测来感知线程的行为变化,按需进行重新映射和调度;另一方面通过采用机器学习技术来构建系统性能预测模型从而对程序在不同类型的处理核的IPC 进行预测,并根据预测结果制定映射调度方案。实验结果表明,与Linux 系统使用的CFS 调度器相比,本文方法提升了52%的计算性能。
接下来的工作中,一方面希望将方法应用于具有更多处理核的异构多核处理平台上,为此需要研究能够高效地寻找最优或接近最优的搜索算法以提高该方法的可扩展性;另一方面由于目前的工作只考虑了性能优化,忽略了系统的能耗情况,因此也希望在当前的基础上引入对能耗指标的优化,从而实现异构多核平台的能效最大化。此外,采用更复杂的ANN 模型来提高预测精度,以及更加全面地考虑资源竞争和线程同步等方面对调度方法设计的影响也是之后计划研究的方向。
猜你喜欢
河北大学学报(自然科学版)(2022年3期)2022-06-16 01:30:10
小学教学研究(2022年5期)2022-04-28 21:29:36
辽宁工业大学学报(自然科学版)(2020年1期)2020-01-07 01:09:48
环球市场(2017年36期)2017-03-09 15:48:21
电信科学(2016年11期)2016-11-23 05:07:56
通信电源技术(2016年6期)2016-04-20 06:21:36
汽车零部件(2014年10期)2014-11-11 12:25:04
吉林建筑大学学报(2012年3期)2012-08-15 00:54:52
甘肃教育(2012年24期)2012-04-29 00:44:03
杭州电子科技大学学报(自然科学版)(2010年5期)2010-01-08 07:28:38
