基于PLC的马铃薯播种机施肥控制系统研究
2020-10-17 01:04梁彦
农机化研究 2020年10期
梁 彦
(四川职业技术学院,四川 遂宁 629000)
0 引言
马铃薯播种机是马铃薯种植作业过程中非常重要的机具,其播种方式、播种质量和施肥过程都会影响马铃薯的产量。我国马铃薯的播种一般采用机械播种机,随着播种机的发展,已经取得了很好的效果,包括作业效率的提高、种子的均匀性和漏播率的降低等方面[1-2]。但是,马铃薯的生长过程需要适当的肥料保证马铃薯的生长,而目前对于播种机施肥控制系统的研究较少,因此主要针对播种机的施肥控制系统进行研究。
马铃薯的生长环境要求土地肥沃,每吨马铃薯需要保证5kg的氮肥和11kg的磷肥[3]。目前,我国在播种机上设置的施肥装置大部分采用手动调节施肥量,不容易控制施肥量,肥料过多易造成土地板结和地下水氮磷元素超标,更甚者还会烧苗降低作物产量;肥量过少,则会影响马铃薯的生长。变量施肥技术[4-6]通过检测马铃薯播种情况,结合播种机的行进速度自动调节施肥量,达到科学施肥目的,可以有效降低劳动成本及环境污染,提高工作效率。因此,本文在马铃薯播种机的施肥环节采用变量施肥技术进行设计。
可编程控制器(Programmable Logical Control,PLC)是以微处理器为核心,结合自动控制、微计算机和通信网络的一种技术,操控性能良好,成本低,目前已广泛应用于农业和工业等领域[6-7]。因此,可以将PLC应用于播种机,以达到对施肥系统的自动控制,满足农业发展的需要。
1 设计思路
1.1 总体工作流程
马铃薯播种机的施肥控制系统的总体流程图如图1所示。该系统主要由中央控制系统、信号采集系统、排肥执行系统、显示器和声光报警器等组成。

图1 马铃薯播种机施肥控制系统总体流程图
1.2 中央控制系统
中央控制系统是马铃薯播种机播种和施肥环节的核心部件。部件中的PLC控制器、交换机和计算机作为本地管理,对播种机各个设施输出工作指令;远程控制计算机作为远程管理,对播种机实现远程控制;PLC通过收集到的各传感器信息,自动调节排肥电机转速,使排肥电机转速、播种机行进速度和马铃薯播种量相匹配。
1.3 信号采集系统
信号采集系统主要组成部件为马铃薯播种传感器、同步器和光电编码器,主要用于采集马铃薯播种机的播种状态和播种机的行驶速度。
马铃薯播种传感器采用红外线对落籽信号进行接收,监控马铃薯的播种情况;同步器负责监控红外线脉冲信号,当有马铃薯籽落下时,产生脉冲信号并传递,同步器自动启动计数功能;光电编码器通过统计单位时间收到的脉冲信号,计算播种机的行进速度,将结果上传至PLC控制器,下达自动调整排肥器转速的命令。
1.4 排肥执行系统
排肥执行系统主要由液压系统和排肥器组成。排肥器的转速采用液压系统进行调节,排肥器选用外槽轮式排肥器。
对于外槽轮式排肥器,槽轮每转1圈的排肥量为
其中,Q1和Q2分别为排肥器主动层和被动层每转动1周的排肥量;d为排肥槽轮的直径;L为排肥槽轮的有效工作长度;γ为化肥的容量;α为化肥在排肥槽的充满系数;S为1个排肥槽的端面积;m为各排肥槽之间的节距;cn为为被动层的特性系数。其中的α和cn均与排肥器的转速n有关。因此,由该式可知排肥量随排肥器转速的升高而增加。
假设排肥器各参数均恒定不变,则该播种机的排肥器在每公顷土地的排肥量q[8]为
其中,γ为播种机的前进速度;N为排肥器数量;t为各排肥器之间的行距。由该式可以看出:当排肥器各参数确定时,每公顷土地的排肥量与播种机的前进速度成反比例关系。因此,本文通过采集播种机的前进速度,利用液压系统调节排肥器转速,以调整排肥器的排肥量。
1.5 声光报警器
播种机一般是在土地空旷环境下作业,噪音很大,使得作业人员对声音不敏感。当设备或在作业过程中有故障发生时,为了使司机能够及时发现,报警装置采用声光报警器。一旦发生故障,报警装置发出报警的声音,同时灯光闪烁。
2 软件设计
为了分析液压系统的动态特性,需要建立数学模型,对液压系统的各控制元件和执行元件之间的函数关系进行分析,再利用PID控制算法对液压系统的各参数进行调节。
2.1 液压系统各元件函数关系
当液压系统的电液比例调速阀在稳定工作时,其传递函数G(s)为
其中,Mf(s)为液压系统流量值;U(s)为比例放大器的电压值;Kq为液压系统在此刻的流量增益;δ为等效阻尼系数;Kα为工作点此刻的比例放大器的增益;s为拉普拉斯算子;ω为液压系统等效无阻尼情况时的自振频率。
液压系统比例阀输出能量一部分作为马达的动力,一部分作为补偿马达在转动过程中的能量损失,如流量泄漏或者流量压缩损失。假设该液压系统处于理想工作状态,即油源恒压、输出压力恒定、系统工作温度恒定、液体弹性模量处于理想状态,马达的液体流动为层流方式,此时可以得到液压系统工作状态下电液比例调速阀的流量传递函数ML(s)为
ML(s)=KqX(s)-kP(s)
摆线液压马达流量连续函数ML为
摆线液压马达扭矩T为
T=DP(s)=(Jms2+Bms+G)θ(s)+TL
对以上3个方程求解,得到马达轴角位移θ(s)为

由此可以得到液压系统的各个元件之间的函数关系,进行下一步,建立液压系统调节的数学模型。
2.2 液压系统数学模型的建立
液压系统BP-PID控制算法的流程图如图2所示。
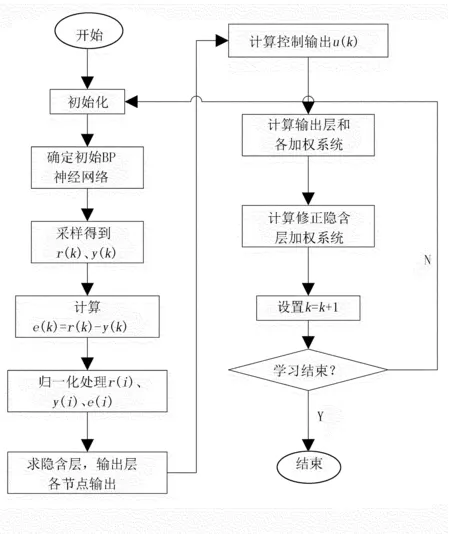
图2 液压系统BP-PID控制算法流程图
1)确定BP神经网络结构包括确定输入层和隐含层的节点数分别为M和N,并给定每层加权系数的初始值,学习速率和惯性系数;
2)归一化处理r(i)、y(i)、u(i-1)和e(j),结果作为PID控制器的输入值;
3)求解隐含层、输出层的各个节点输出,该输出值即为PID控制器的可调参数,分别为KP、KI、KD。
3 试验结果
为验证该播种机的施肥控制系统的使用性能,首先对施肥装置的液压控制系统的BP-PID控制算法进行仿真试验,确保该控制器的稳定性;再将该播种机在田间进行试验,验证该播种机的施肥控制系统的使用性能。
3.1 BP-PID控制算法运行试验
在播种机的施肥控制系统内部构造一个4-5-3的3层神经网络,结构如图3所示。规定学习速率η=0.25,动量项α=0.45,电机稳定转速n=120r/min,采用12V直流电源进行供电,对该电机转速进行试验,检测其转速,结果如图4所示。
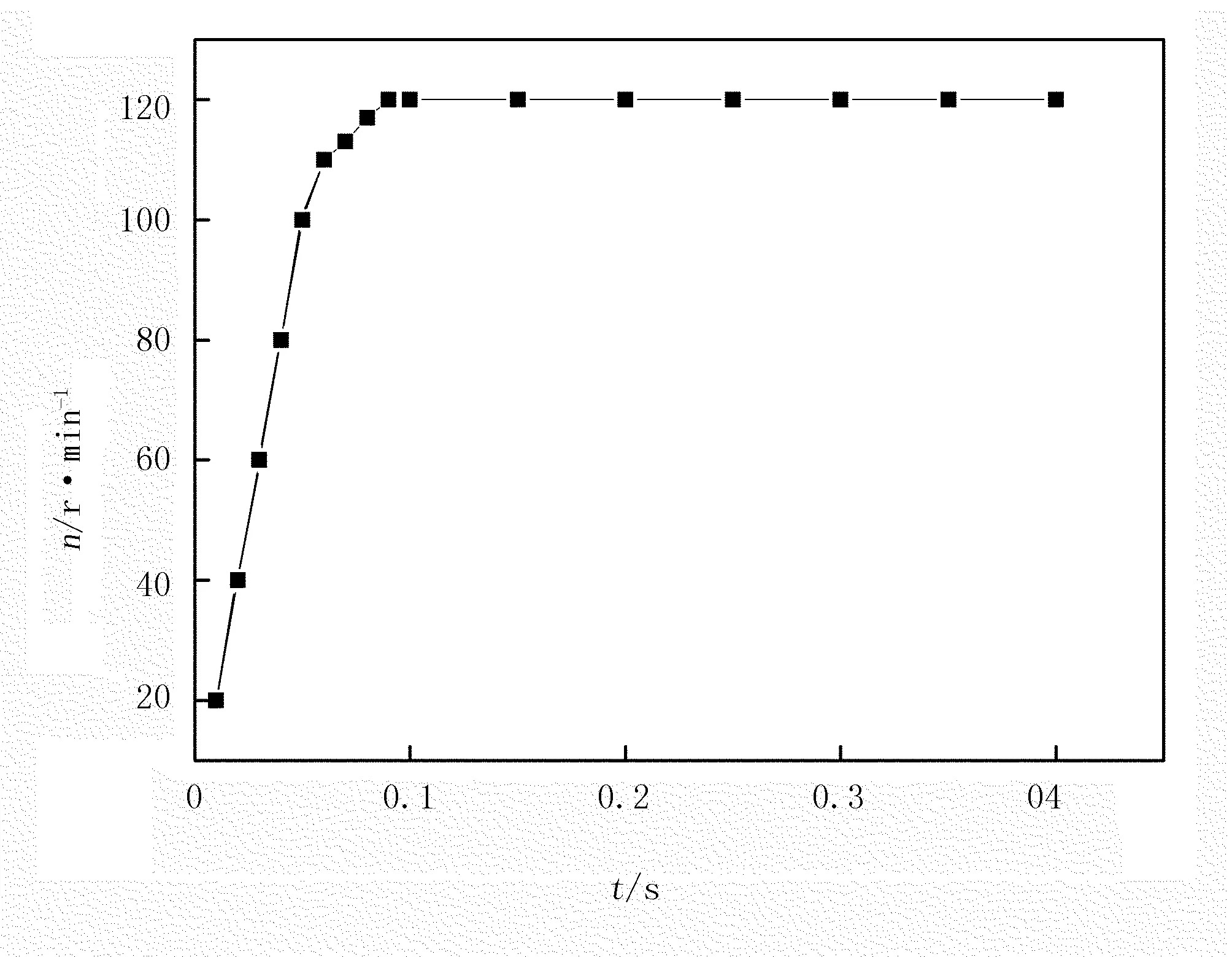
图4 BP-PID控制算法运行试验结果
由图4可以看出:电机的转速从0增加至120r/min,转速增长平稳,电机达到平稳工作状态工作的时间为0.1min,没有出现转速波动的过程,在后续的工作过程中转速平稳。这说明,该控制算法可以使电机稳定工作,且在启动时可以快速达到工作转速。
3.2 田间试验
将该播种机在田间进行马铃薯的播种和施肥试验,肥料选用马铃薯专用复合肥,对播种机分别进行常量播种和变量播种试验。常量播种试验结果如表1所示,变量播种试验的结果如图5所示。
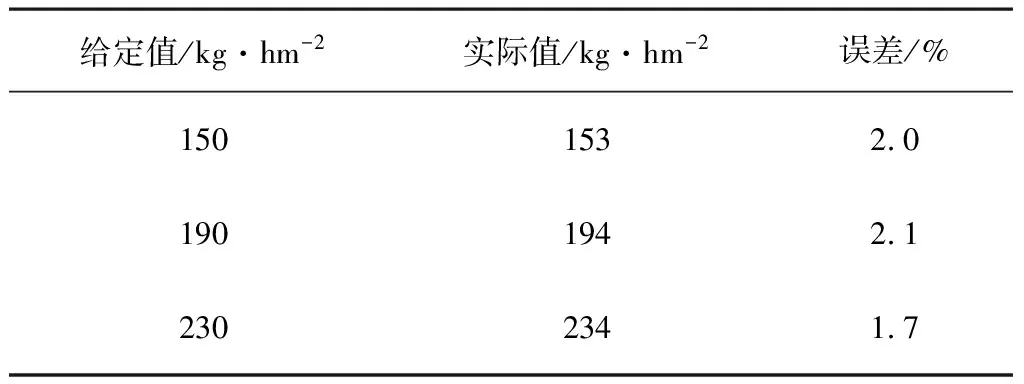
表1 常量播种试验结果
由试验结果可知:常量播种过程中,施肥误差较小;随着播种机施肥量的改变,其误差仍然小于2.5%。在变量播种过程中,随着播种量的改变自动调节施肥量,并逐步趋于稳定,调整时间小于3s;3s后,其最大超调量均小于3%。因此,该马铃薯播种机的施肥系统能够满足用户的使用要求。
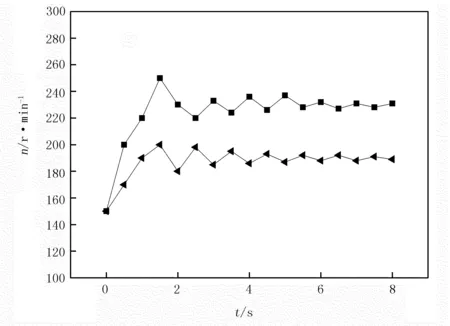
图5 变量播种过程施肥结果
4 结论
1)基于PLC技术设计了马铃薯播种机的施肥控制系统,主要由中央控制系统、信号采集系统、排肥执行系统、显示器和声光报警器组成。
2)该施肥控制系统通过采集播种器播种速度和行进速度确定排肥量,利用液压控制器对排肥器的排肥量进行控制,液压控制系统采用BP-PID控制算法,以实现变量施肥的目的。
3)播种机的施肥控制系统的性能测试结果表明:该施肥控制系统可以满足变量变量施肥的使用要求,且该系统在工作过程中性能稳定。
猜你喜欢
少儿科学周刊·儿童版(2021年21期)2021-12-11
今日农业(2020年22期)2020-12-14
制造技术与机床(2017年6期)2018-01-19
陕西画报(2016年1期)2016-12-01
雷锋(2016年4期)2016-05-30
创新作文(小学版)(2016年31期)2016-03-11
学习月刊(2015年10期)2015-07-09
电源技术(2015年9期)2015-06-05
福建农业科技(2015年3期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01