基于物联网的智能割草机器人运动控制系统研究
2020-10-17 01:04:28张东涛周莹莹吴东林
农机化研究 2020年10期
张东涛,周莹莹,吴东林
(1.漯河食品职业学院 信息工程系,河南 漯河 462000;2.漯河职业技术学院 信息工程系,河南 漯河 462000)
0 引言
自19世纪后期导电割草机的研究开发以来,在短短数年内农用往复式割草机获得了较大程度的发展。20世纪中叶,旋转割草机已经开发出来,人工草原开始生产和使用旋转割草机。近年来,各个国家为了节约能源和创造更安全的良好环境,加大了自动化割草机的研究,智能割草机器人的研究应运而生。为此,以智能割草机器人为研究对象,构建了先进的定位、避障和路径规划理论,对该领域的研究具有一定的促进作用。
1 基于物联网的割草机器人定位
为了实现割草机器人全自动作业,首要前提是保证其自身能够实现精确定位。本文将物联网和割草机器人结合起来,充分利用物联网强大的传感器信息,提升割草机器人物联网作业能力,实现割草机器人的定位功能。
物联网定位是利用无线传感器网络计算割草机器人的位置坐标,实现无线定位技术。无线定位技术包括测距和非测距两种类型,由于测距的定位技术精度较非测距高很多,主要分析测距定位算法。测距定位主要有RSS、AOA和TOA等多种,本文分析和介绍后两种。
1)AOA定位技术。AOA定位是利用信号到达传感器的角度差异,通过计算得出坐标位置。首先利用传感器测量信号角度,然后获得定位节点和各个无线传感器之间的夹角关系,最后根据三角关系计算定位节点的实际坐标位置。AOA定位示意如图1所示。
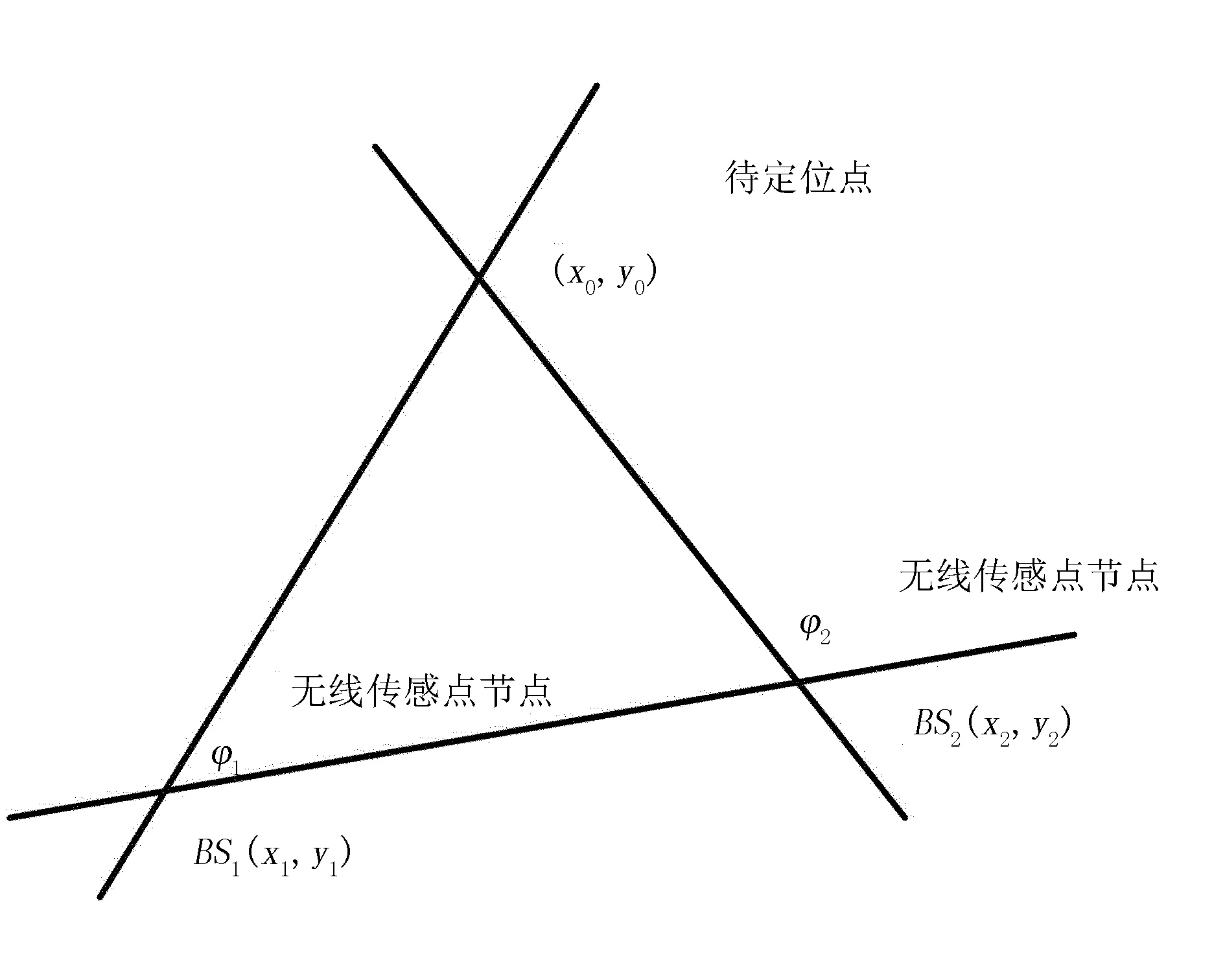
图1 AOA定位示意图
图1中,假设待定位点和无线传感器基站在一个平面上,从待定位点发出信号,然后和传感器之间形成一定的角度,无线传感器基站可以测出该角度值AOA。根据这些角度值确定信号的发射路径,并且这些路径交叉点就是待定位点坐标。假设两个无线传感器基站测出的信号到达角度为φ1和φ2,且无线传感器基站坐标提前已经确定,那么对于第i个无线传感器基站,存在以下计算方程式。通过解方程,可以求出待定位点的位置信息。
(1)
AOA定位方法对应用场景要求较高,为了保证定位的精度,待定位节点和无线传感器基站之间的信号传感必须无遮挡的。另外,其对无线传感器基站的密度也有较高的要求,因此该定位方法实际应用精度较低。
2)TOA定位技术。TOA定位原理如图2所示。假设待定位点为(x0,y0),至少存在3个坐标已经知晓的无线传感器基站BSi(xi,yi),待定位点发出信号,经过ti时间后到达基站BSi,由于电磁波在空气中传播的速度c已知,那么可以计算出待定位点和无线传感器之间的距离Δi。
以无线传感器基站坐标为圆心,以Δi为半径画圆,这几个圆相交的点就是待定位节点的坐标,利用三边原理,可以得出(x0,y0)的计算方程式为
(2)
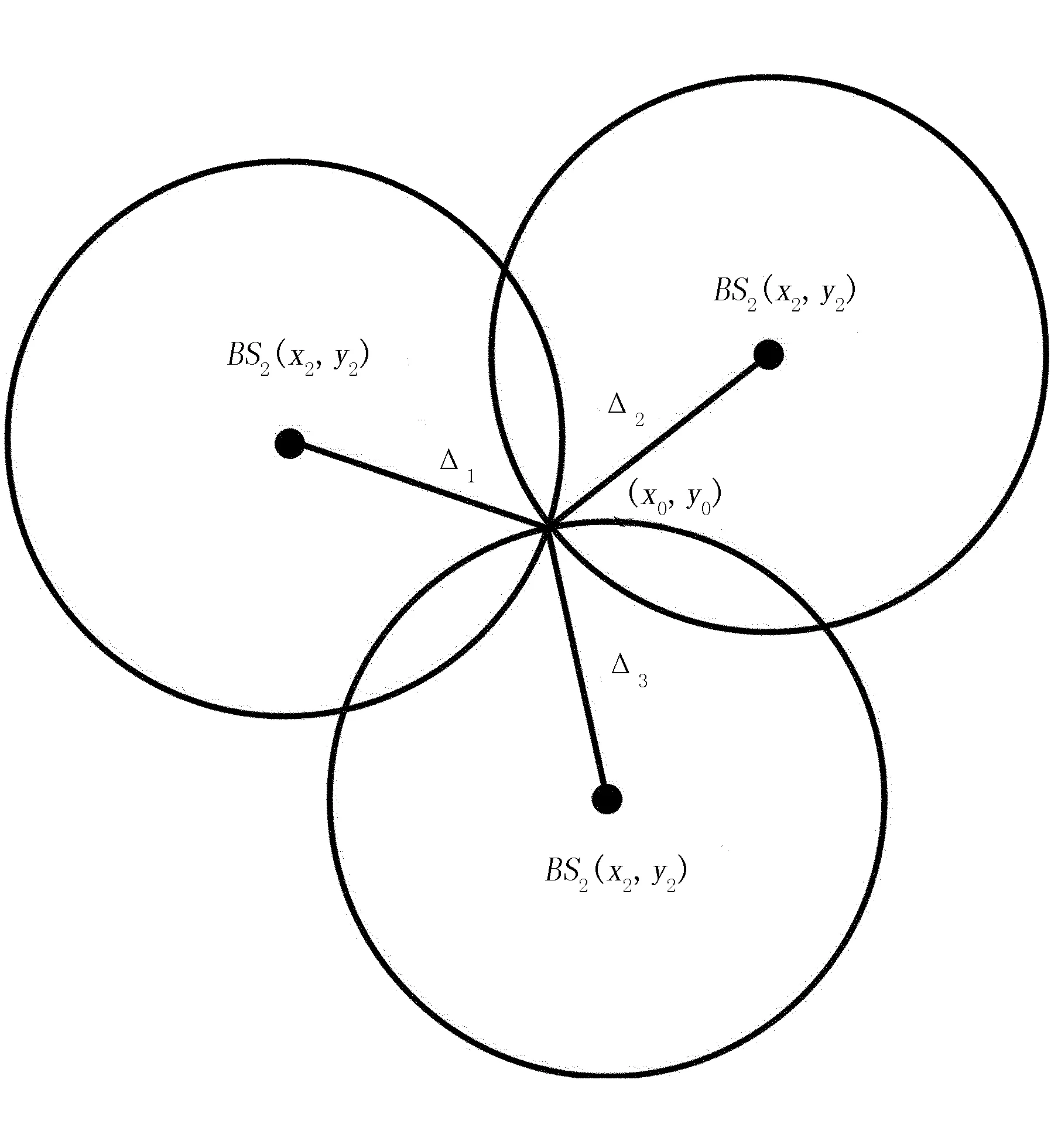
图2 TOA定位原理示意图
在TOA定位求解中,ti时间精度直接影响定位精度,而若待定位点和无线传感器基站的时钟不同步,或者信号在传输过程中收到遮挡,那么会直接影响坐标精度。
3)TDOA定位技术。TDOA定位技术是在TOA基础上的一种优化,不需要待定位点和无线传感器基站的时钟同步,结构相对简单,成本也比较低。在TDOA定位算法中,假设待定位点为(x0,y0),k个无线传感器基站坐标为BS1(x1,y1),BS2(x2,y2),…,BSk(xk,yk),各点和(x0,y0)的距离分别为Δk,将这个值带入式(3)可以求出待定位目标坐标(x0,y0)。
(3)
TDOA定位技术精度相对较高,本文在定位求解研究中采用该方法。
2 智能割草机器人结构
2.1 智能割草机器人运动学模型
智能割草机器人运动系统是实现高效、高质量完成作业的基础,为了保证其具有稳定性、精准性和可靠性,采用两个动力轮和1个转向轮组合的方式控制割草机器人的前行和转向,其运动学模型如图3所示。
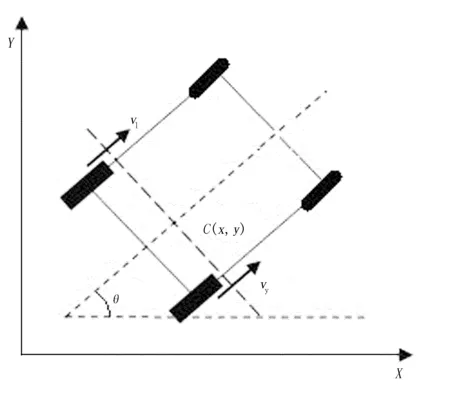
图3 智能割草机运动学模型
智能割草机器人采用双后轮差分控制方式,在运动控制中,以两轮中心点为运动基准点,假设vl和vr分别是两个轮子的运动速度,则该模型的运动学方程为
(4)
(5)
将上面两个式子联立后可得
(6)
(7)
其中,C(x,y)为智能割草机器人运动基准点;θ为智能割草机器人移动方向导角;ω和v分别为运动角速度和前进速度;L为驱动轮间距离;Ts为采样周期。
2.2 智能割草机器人系统组成框架
智能割草机器人控制系统是控制其进行自主移动和割草的核心模块,由智能控制器、电机驱动、行走装置、割草装置、人体热释传感器、超声波传感器、红外传感器、接触传感器和温度传感器等组成。系统框架如图4所示。
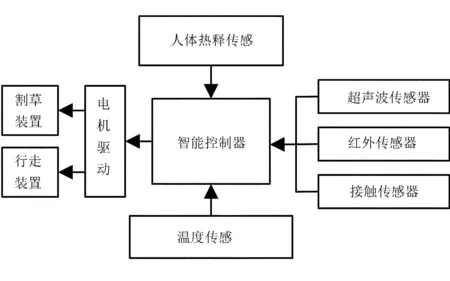
图4 智能割草机器人控制系统框架
2.3 智能割草机器人牵引装置
本文研究的智能割草机器人是对商用人力推动式割草机的一种改造和优化,可以与预割草机主体配置的牵引驱动机构连接,也可以通过其水平中心轴连接的驱动模块安装L轴承板。另外,该智能割草机器人可以实现自主作业和手推式作业两种方式,分体式Shif组件可以轻松恢复原始的手推式割草机。智能割草机器人牵引装置如图5所示。

图5 智能割草机器人牵引装置
3 智能割草机器人驱动模型
在智能割草机器人的驱动系统上安装两组带有低速变速器的直流电动机,且两组电动机可以分开控制,其驱动模块的3D示意图如图6所示。
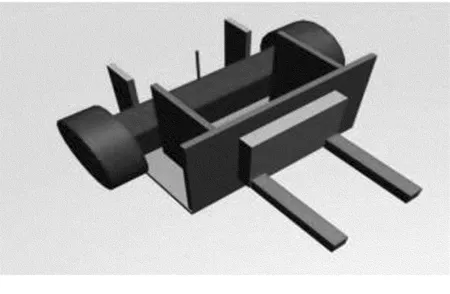
图6 智能割草机器人驱动模块3D模型
智能割草机器人驱动模型如图7所示。假设割草机器人传感器装置在理想情况下工作,也就是说其可以测量自己的姿势信息以及目标和障碍。
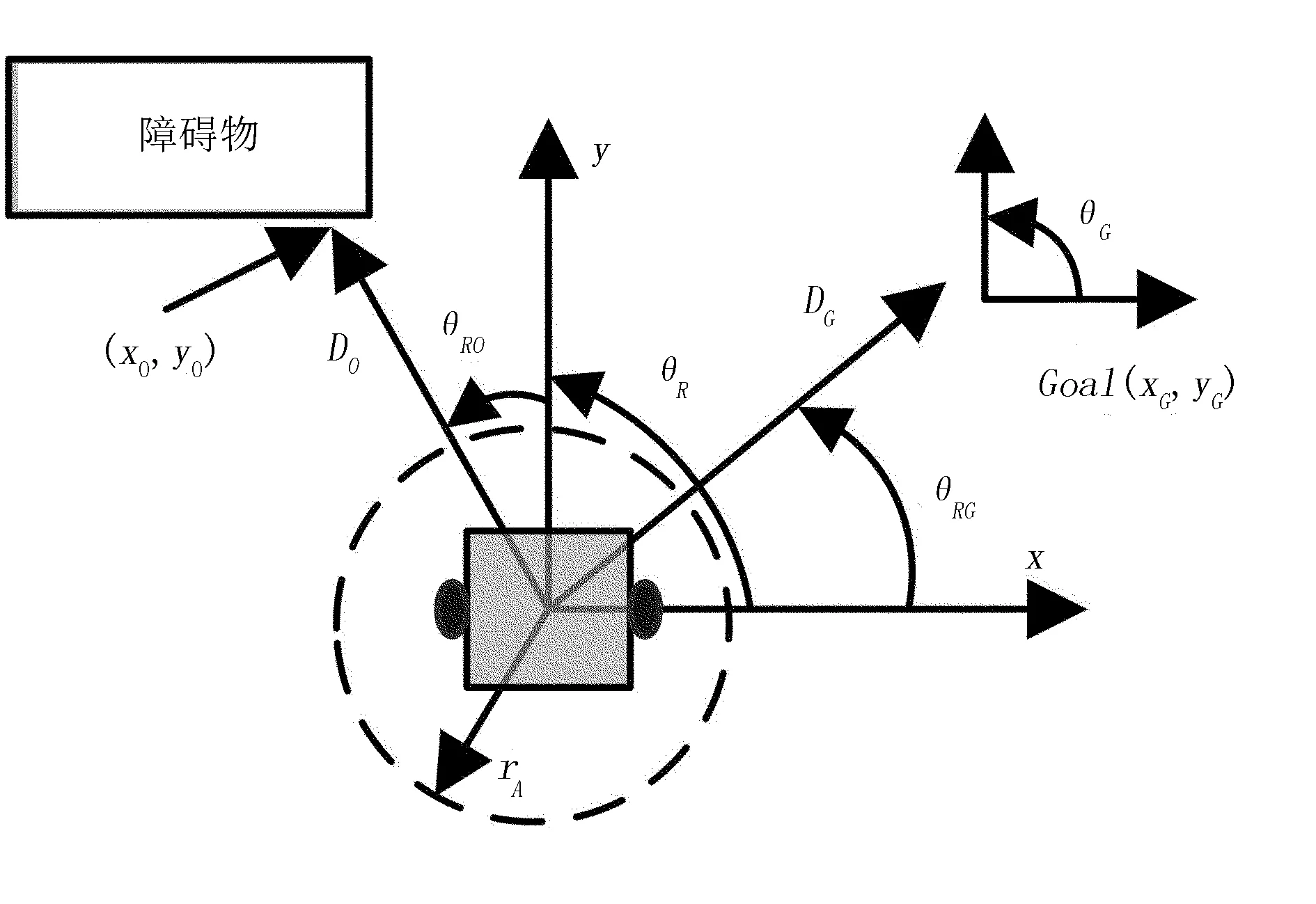
图7 智能割草机器人驱动模型
在割草机器人前面180°安装了几个超声波检测装置。在能够检测到的距离上,超声波检测作为割草机器人的安全碰撞的rA距离,割草机机器人撞击点的坐标为是(xR,yR)和(xG,yG),角度为θR和θG。其包含的角度和距离分别由θRG和DG表示,计算表达式为
(8)
(9)
智能割草机器人与障碍物之间的最近距离和夹角分别为Do和θRD,同样可以根据上面两个式子进行计算。智能割草机器人驱动模型中的受控参数是割草机运动速度S和旋转角度θ,S∈(0,1.0)m/s,θ∈(-30°,30°)。智能割草机器人作业时旋转角度θ为正值,否则θ为负值。
本文在智能控制器上嵌入了两个模糊控制算法:第1种是路径规划模糊控制算法FUZZY1,主要用于智能割草机器人的路径规划,引导其向前移动至目的地;第2种是避障模糊控制算法FUZZY2,主要用于让智能割草机器人能够避开任何的障碍物,防止碰撞发生。模糊控制过程可以用以下方程式表示,即
(10)
(11)
为了能够实现对智能割草机器人的路径规划和避障控制,使用以下规则来选择控制器,即
IF DO>rA,THEN α=1,ELSE α=0
其中,参数a用于确定FUZZY1或FUZZY2选择的关键因素,如图8所示。rA是避免碰撞的智能割草机器人的安全半径,与机器人尺寸有关。FUZZY1有3个关键输入参数:①θe1为θRG和θG之间的差值;②θe2为θR和θG之间的差值;③DG。FUZZY1有两个关键输入参数,即θRO和DO。FUZZY1和FUZZY2控制算法的输出VL和VR分别表示智能割草机器人左轮和右轮的运动速度。
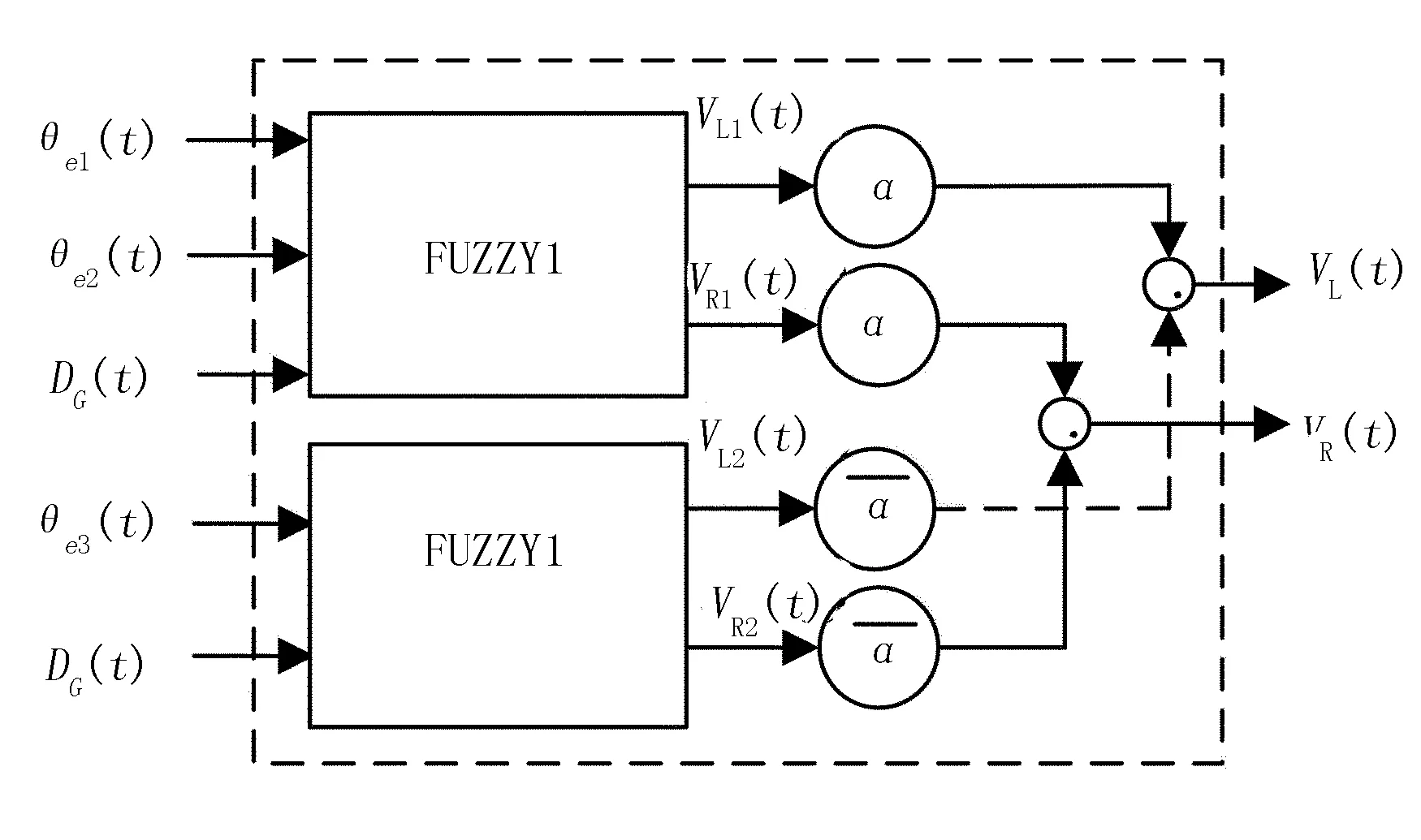
图8 模糊控制算法的输出切换
4 试验与结果分析
为了验证该智能割草机器人控制系统的可靠性和稳定性,在高尔夫球场进行了实际的割草作业。试验场景和试验结果分别如图9和图10所示。其中,灰色区域为待割草区域;黑色区域为重叠覆盖的区域;斜线区域为障碍物区域。为了保证机器人避障和定位的准确定,在障碍物周边有安装一系列的无线传感器节点。

图9 试验场景图
图10 试验结果图
图10中,智能割草机器人能够实现全区域覆盖的割草作业,未覆盖区域约占12%,符合设计要求。试验结果表明:智能割草机器人能够对障碍物进行自主避障,且路径规划路线最优,实现了目标区域的全区域覆盖割草作业。
5 结论
设计了一套基于物联网的智能割草机器人运动控制系统,能够在一定程度上自主完成割草任务。试验结果表明:智能割草机器人能够对障碍物进行自主避障,且路径规划路线最优,实现了目标区域的全区域覆盖割草作业。
猜你喜欢
电气化铁道(2023年6期)2024-01-08 07:45:48
民间故事选刊·上(2022年4期)2022-04-17 11:24:45
民间故事选刊(2022年7期)2022-04-15 03:19:18
保健医苑(2021年9期)2021-09-08 14:38:06
时代文学·上半月(2019年6期)2019-12-13 07:20:41
环球时报(2019-06-11)2019-06-11 06:17:18
电气化铁道(2018年4期)2018-09-11 07:01:38
金色少年(奇趣科普)(2017年4期)2017-06-05 15:03:46
探索科学(2017年4期)2017-05-04 04:09:47
中国交通信息化(2016年8期)2016-06-06 03:56:25