果园株间机械除草技术研究进展与分析
2020-10-17 01:04:24李法德闫银发郭家乐宋占华
农机化研究 2020年10期
杨 硕,李法德,2,闫银发,2,董 岩,郭家乐,宋占华,2
(1.山东农业大学 机械与电子工程学院,山东泰安 271018;2.山东省园艺机械与装备重点实验室,山东 泰安 271018;3.日照钢铁有限公司,山东日照 276806)
0 引言
果园地势广阔,果树株距、行距大,适于杂草生长,极大地影响了果树的生长和水果产量[1]。杂草造成的果树减产可达10%~20%[2],因此除草成了果园生产活动中必不可少的重要环节。常见的除草方式有化学除草、机械除草、生物技术除草、热力除草和电力除草等[3]。化学除草主要指使用除草剂进行杂草防除的方式,除草剂使用方便,可使杂草迅速得到控制[4],但大量使用会对生态环境造成破坏,且同一种除草剂的长期使用还会使杂草产生“抗药性”[5]。生物技术除草、热力除草和电力除草虽然除草效果尚可,但面临技术成本高、使用不方便、费用昂贵等问题。随着有机农业的提出和发展,果园杂草管理应避免化学除草剂的使用[6],而机械除草工作效率高、效果显著,开始受到越来越多的重视[7]。
据统计,截止2016年底,我国果园面积已达12 981.6khm2[8],果园种植业的迅速发展提升了果园机械的市场需求。传统的果园除草机主要解决行间除草问题,株间杂草无法清除,导致果园杂草重新泛滥,降低了机械除草的作业效果[9]。在果园中,由于果树株间为非连续区域,相比于果园行间机械除草,株间机械除草则更加困难[10]。果园株间除草机可同时进行果树行间和株间除草,作业效率高,除草彻底。本文主要介绍了果园株间除草机的国内外研究进展,对避障装置、除草装置、驱动方式、工作速度等关键技术进行分析,在此基础上提出果园株间机械除草技术的发展方向,以期为后续研究提供依据。
1 果园株间除草机概述及现状
果园株间除草机主要包括动力装置、避障装置和株间除草装置,工作过程如下:避障装置未触碰到果树或障碍物时,避障装置不工作,株间除草装置进行正常幅宽作业;当避障装置触碰到果树或障碍物时,除草装置开始由避障装置控制改变作业路径,使除草装置能顺利避开果树和障碍物;当避障装置与果树分离后,株间除草装置复位,进行正常幅宽作业,以此往复循环。果园株间除草机通过避障装置改变除草装置的作业路径,从而实现果树株间机械除草,除草更加干净、彻底,有利于果树生长和水果产量的提高,使果园株间机械除草效果得到改善[9]。
1.1 国外研究进展
国外对果园机械除草作业的研究始于20世纪50年代[10],到目前为止,已经研制出多种类型的果园除草作业机械,且已经将智能控制技术运用到了低矮农作物田间株间除草上[11-12]。其中,果园株间除草机发展较快。波兰农机生产企业JAGODA JPS[13]生产了一款果园人工协作株间除草机[见图1(a)],避障方式为人工操纵手柄调整除草装置与果树的相对位置,从而实现避障除草作业。意大利农机生产企业Mornei研制了一款集松土除草于一体的果园株间除草机,如图1(b)所示。意大利AEDES公司[见图1(c)]和ARRIZZA公司[16][见图1(d)、(e)]生产的果园株间自动避障除草机,其除草装置多样,1台拖拉机可以分别与多种除草装置配合使用,从而实现了一机多用。然而,国外大型果园株间除草机并不适于在我国传统果园进行株间除草作业。
1.2 国内研究进展
国内对苗间机械除草的研究始于20世纪60年代,70年代苗间机械除草得到快速发展[13]。目前,我国果园机械除草作业普遍采用微耕机或果园通用除草机,存在仅能除去行间杂草、对果树株距间造成漏除现象,除草作业效果大大降低[10]。我国果园株间除草研究起步较晚,现阶段国产的果园株间除草机还没有被广泛推广应用。石河子大学的张斌等对果园株间除草自动让树装置进行了设计,借助于计算机建模软件对自动让树装置各部分进行仿真优化改进,完成了样机试制。田间试验表明:果园株间自动让树装置在正常速度作业情况下,让树作业漏耕率小于6%,让树通过率100%[9-10,14]。石河子大学的王斌等对果园避障旋耕机关键部件进行了设计,结果表明:果园避障旋耕机在常规作业速度(2~5km/h)下,避障作业漏耕率小于5%,稳定性可达100%[15-17]。塔里木大学的赵群喜设计了一款果园避障旋耕机,田间试验表明:避障通过率为100%,碎土率为97.54%,漏耕率为3.58%[18]。中国农业大学的徐丽明等分析了自动避障机构躲避葡萄藤的工作原理,对自动避障机构进行了优化设计,试验表明:优化后平均除草作业覆盖率提高8%以上,除草作业稳定性较好[19]。石河子大学的赵紫薇等设计了一套酿酒葡萄收获机的避障系统,使用接触式检测方法及PLC与液压驱动执行相结合的避障系统,进行避障系统试验台试验,结果表明:避障系统检测模块在行走速度为1km/h时,检测精度可达93.18%;通过对避障系统集成进行试验验证表明,避障系统可以达到避障要求[20]。济南大学泉城学院的杜文圣等设计了一种新型葡萄园自动避障除草机,结构简单,除草效率高[21]。塔里木大学的万畅等发明了一种果园中耕机避障机液伺服系统,可实现果园中耕机避让树干作业[22]。北京时代沃林科技发展有限公司研制了一种无人驾驶株间除草机,如图2(a)所示。宁夏智源农业装备有限公司所生产的果园双边株间除草机,作业效率可达0.667hm2/h,如图2(b)所示。

图2 国内株间除草机
典型果园株间除草机及其性能如表1所示。
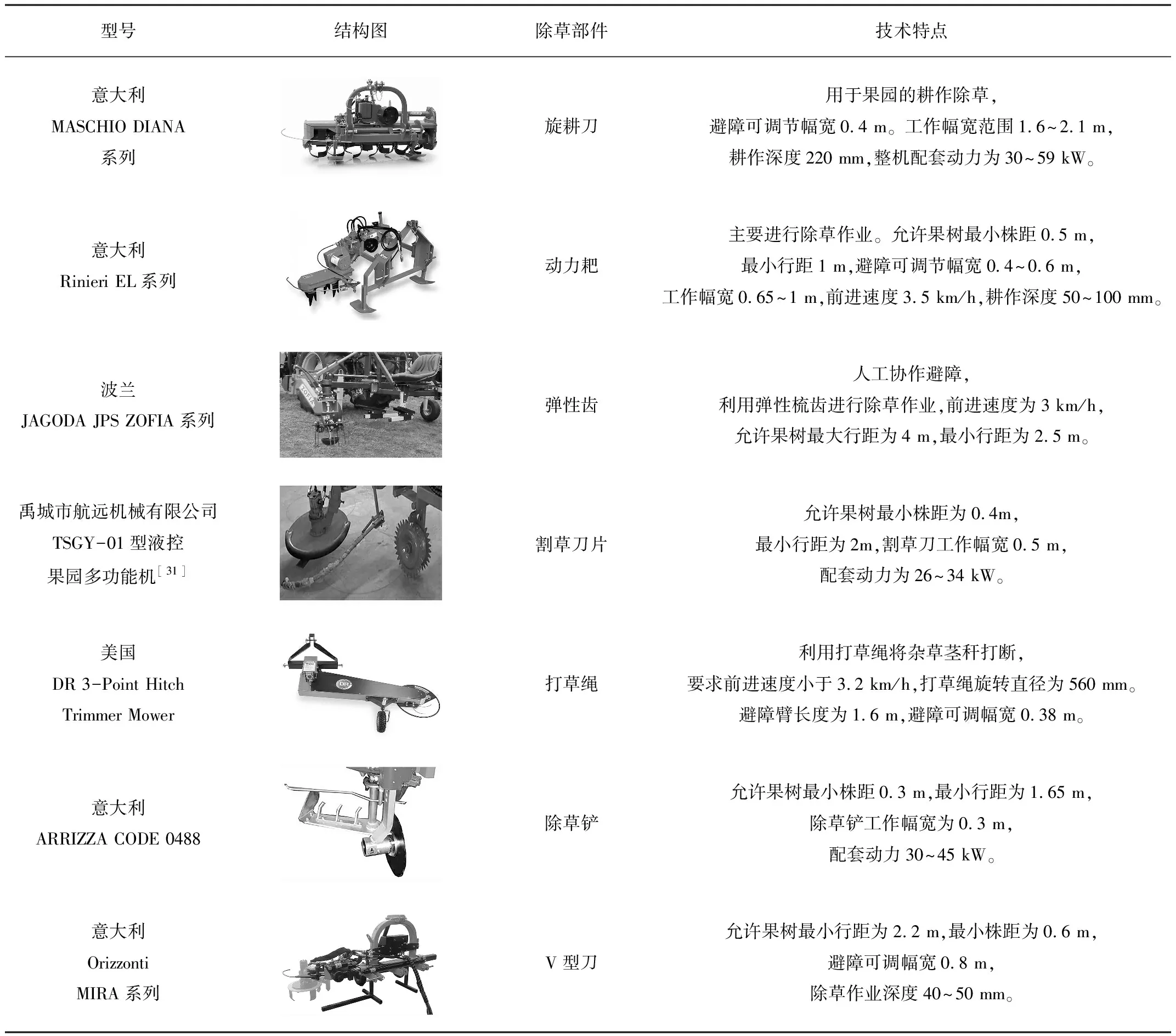
表1 典型果园株间除草机及其性能Table 1 Performance characteristics of typical orchard intra-row weeding machines
2 果园株间除草机关键技术
2.1 果园株间除草机避障装置
果园株间除草避障装置分为接触式避障和非接触式避障,接触式避障主要包括绕立轴旋转式[10,14,23]、四连杆机构偏摆式[15-19,22,24-25]及滑套横移式[29,39-40],3种方式的共同特点是均有机械感应触杆,且均由液压系统控制实现避障作业。张斌等[10]设计了一款绕立轴旋转式果树株间自动让树装置,避障过程为:当感应触杆接触果树时,液压系统控制让树装置沿与机具前进垂直方向绕轴旋转,从而实现避障作业。王斌等[15]、徐丽明等[19]等设计的避障装置是通过液压缸伸缩驱动平行四杆机构偏摆实现的。石河子大学的毕新胜等[27]设计了一种可以改变作业幅宽的果园旋耕机,调幅机架在感应触杆与障碍物接触和分离的过程中,由油缸带动做往返运动,从而实现避障作业。非接触式避障又分为人工协作避障和智能避障,进行避障作业时作业机具均不与果树等接触。人工协作避障主要依赖人为操纵避障装置进行避障作业,在除草装置将要触碰到果树前,人为操纵避障装置,改变除草装置作业路径进行避障作业。智能避障技术主要包括机器视觉技术、传感器检测技术和GPS导航定位技术。机器视觉技术通过实时采集、处理、分析图像,辨别作物与杂草,计算作物的位置信息[11]。机器视觉具有能够进行实时识别和定位、精度较高、信息量丰富及目标信息完整等优点[28-30];缺点是稳定性较差,容易受田间环境和人工管理方式的影响[31]。Astrand等[32]在甜菜田中建立了自动除草系统,利用机器视觉系统导航,通过杂草识别和旋转锄头控制系统,在直播条件下,甜菜植株密度高而杂草密度低或中等时,杂草的识别和去除效果较好。丹麦的Nørremark[33]、西班牙的Pérez-Ruiz[34]对株间自动避障除草技术展开了研究,把机器视觉技术、GPS定位技术应用到了株间除草机械的自动避障控制系统中,改善了除草效果且降低了伤苗率。华南农业大学的胡炼等[35-36]、中国农业大学的陈子文等[37]把机器视觉技术与传感技术应用到了自动避障控制系统中,取得了较好效果。到目前为止,红外线传感器、激光传感器及超声波传感器等传感器得到了较快发展[38]。美国伊利诺伊大学的Cordill等[5]研制了一种玉米株间锄草机器人,利用激光传感器组检测作物,以锄刀为除草部件,沿正弦波轨迹避苗或锄草,采用2组互成角度的激光传感器对机具横向偏移量进行检测。试验表明:激光传感器可识别玉米作物,并能够检测机器相对于作物行的偏移量。Linden等39]基于红外激光测深传感器对株间机械除草的深度控制进行了研究。李震等[40]研制了一种钢丝绳牵引货运机避障系统,通过检测超声波渡越时间的方法测量货运机与障碍物间的距离,从而实现障碍物检测,试验表明:动、静态障碍物货运机避障停车率均可达到100%。GPS技术具有全球、全天候工作、定位精度高、操作简便等优点[29,41]。张春龙等[42]研究的移动机器人平台,利用车载DGPS获取道路方向与位置信息,从而控制机器人的道路导航、轨迹规划及速度与方向角。采用单一的智能避障技术难以满足在复杂田间工作环境下的作业需求,几种技术的相互融合可提高智能避障装置的准确性、稳定性及可靠性。Creed等[43]研制的自主割草机试验台,通过激光测距仪、跟踪控制器、GPS和差动驱动系统的结合,综合分析GPS实时定位信息与障碍物信息,从而得到运动路径规划。表2为果园株间机械除草避障方法的比较,并总结出其优缺点。
2.2 果园株间除草机除草装置
除草末端执行器的性能直接影响锄草的效率[11],因此选择合适的株间除草装置至关重要。根据株间除草装置是否有动力源可分为被动除草装置和主动除草装置[46]。被动株间除草装置主要包括除草铲[10,47-48]、指状锄草刀[28]、犁、圆盘耙等。此类除草装置结构简单,价格低廉,能够满足除草要求。主动株间除草装置根据其运动方式分为立轴旋转式和水平旋转式。立轴旋转式包括动力耙、弹齿式、割草刀片、V型刀、立轴式打草绳、垂直刷式、爪式等。Ahmad等[49]以弹齿为除草部件,设计了一种蔬菜作物株间自动机械除草机,用直流电机驱动弹齿旋转,利用高速旋转的弹齿达到除草的目的,如图3(a)所示。意大利Moreni公司[见图3(b)]和Rinieri公司以动力耙为工作部件,生产了集除草、松土于一体的果园株间除草机。陈子文等[37]设计了行星刷式株间锄草机械手,ARRIZZA公司设计了除草刷盘,采用锄草刷[见图3(c)]作为锄草部件,旋转的刷盘将杂草幼苗刷断或覆盖土壤。卢希诚等[50]研制了一款能改善空气流动性能而噪声又较低的旋刀装置用于草坪割草。威海中颐现代农装科技有限公司生产了一款自动避障式割草机,依靠割刀旋转切割杂草以达到除草的目的,如图3(d)所示。水平旋转式包括旋耕机、水平式打草绳、除草轮等。王斌等[见图3(e)][15]、赵群喜等[18]以旋耕机为工作部件,设计了一款集除草、碎土于一体,并且可以有效避让果树及障碍物的旋耕除草作业机具,可实现果树株间旋耕除草作业。意大利AEDES公司生产了一种由尼龙绳高速旋转打击杂草的果园株间除草机,如图3(f)所示。程远瑜等[51]、曾晨等[52]、王勇斌等[53][见图3(g)]以除草轮为除草作业部件,确定了除草轮行间除草的最佳工作参数。
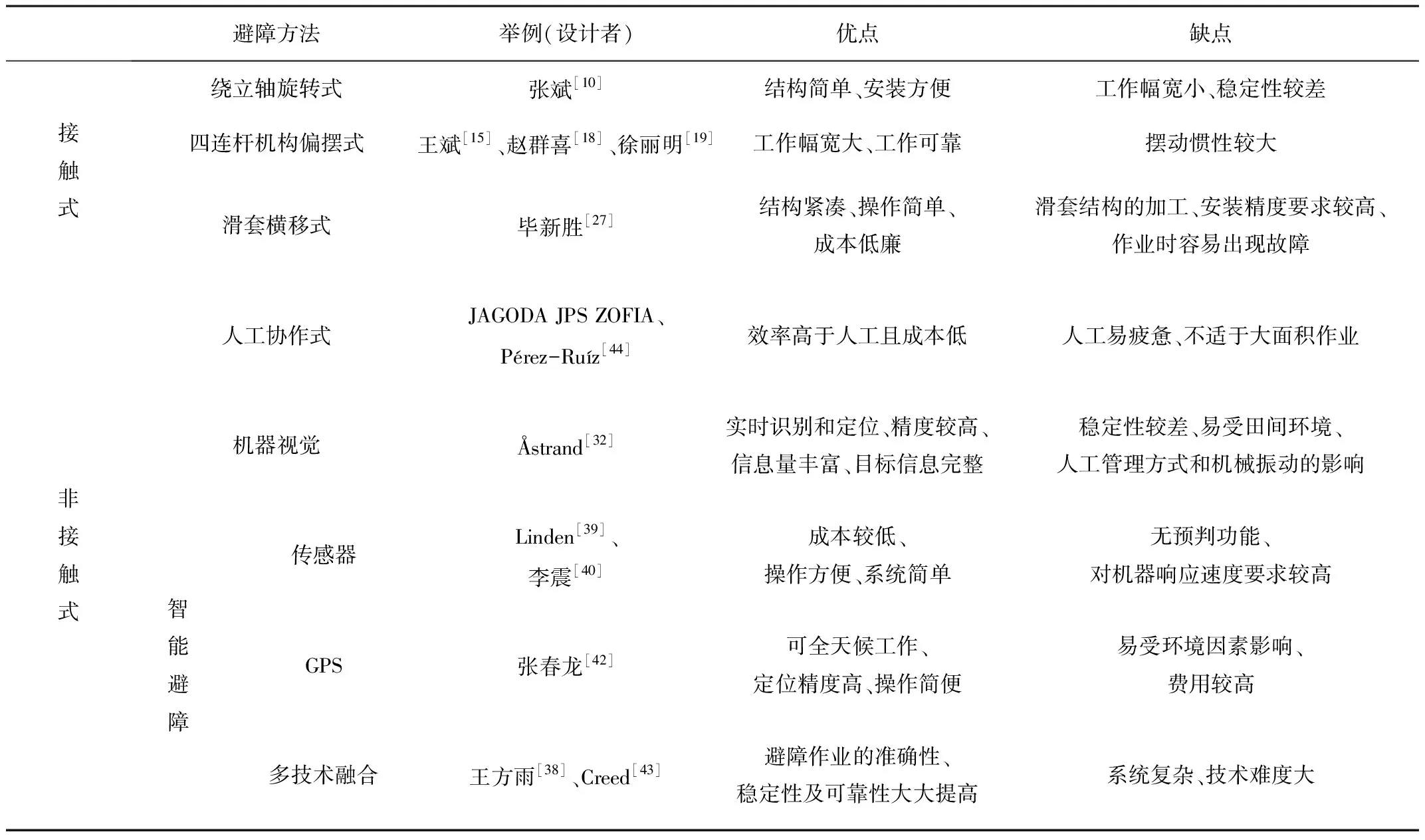
表2 果园株间避障方法比较Table 2 Comparison of intra-row obstacle avoidance methods
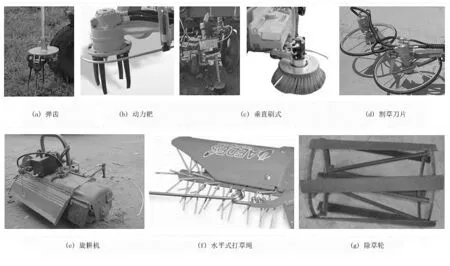
图3 株间除草装置
2.3 果园株间除草机驱动方式
接触式避障装置的驱动方式主要为液压驱动[10,14-19],果树或障碍物等对触杆产生压力,通过液压系统驱动避障装置,使除草装置实现避障作业。除草装置的驱动方式主要有液压驱动、电动和气动。目前,株间除草装置多采用液压驱动和电机驱动。表3为几种驱动方式工作原理及优缺点比较。
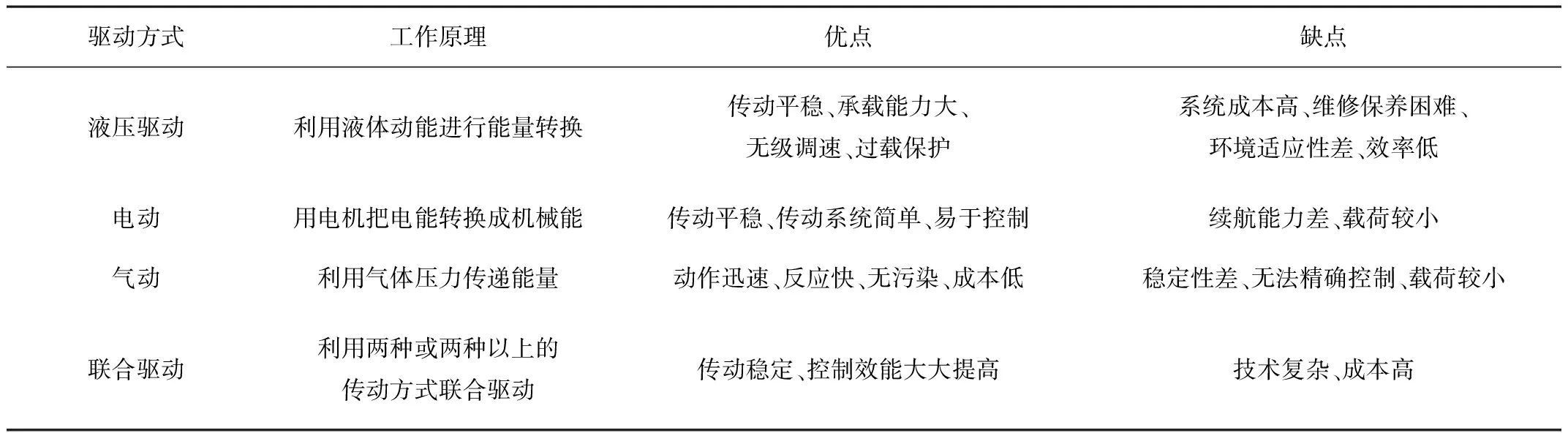
表3 驱动方式比较Table 3 Comparison of driving mode
2.4 工作速度
果园株间除草机的工作速度直接反映其工作效率,由于果园株间除草作业时,机器会进行除草作业和避让作业,若前进速度变大,避让装置工作频率必然加快,这对避障装置及除草装置的稳定性提出了更高的要求,要求其具有更快的反应速度和更高的稳定性。同时,作业速度过快还会使除草轮等除草装置达不到理想的除草效果。因此,确定合理的工作速度,既能满足除草要求又能降低机器成本。张斌等[10]通过田间试验得出:当果园株间除草机作业速度为2~6 km/h时,果园株间自动让树装置可以满足果园株间除草作业要求。赵群喜等[18]确定了果园避障旋耕机的最佳工作参数。徐丽明等[19,54]通过对篱架式栽培葡萄株间除草机样机的初步试验得出:葡萄植株株距为1 m,其前进速度为350~420 mm/s时整机工作较平稳。同时,进一步明确了避障液压缸速度、前进速度和控制系统预设的当触杆转动达到一定角度触发自动避障机构工作的阈值(简称“角度阈值”)对除草作业覆盖率的影响规律,得到最优参数组合为:避障液压缸速度160 mm/s,前进速度380 mm/s,角度阈值15.12°,在最优参数下进行了田间验证试验,获得平均除草作业覆盖率约为90.02%。程远瑜等[51]、曾晨等[52]确定了除草轮的最佳工作参数,但机器并没有避障装置,仅能进行行间除草作业。以上研究人员均未对机器前进速度与避障作业效果间的关系进行详细的研究,到目前为止,关于果园株间除草机最佳工作速度的研究还很少。
3 果园株间除草的发展趋势
1)果园产业多学科结合发展,解决农机农艺融合问题,基于果树生长特性,培育适于机械化作业的果树品种,建立新型果园。利用标准化建园技术,规范果树株距、行距及行头留距等[55],有利于确定果园株间除草机械的整机参数及工作参数,进而提高作业质量和工作效率。随着农业传感器技术、机器视觉技术、GPS技术的发展,3种技术相互融合成为今后研究的热点,各技术实现优势互补,可提高工作效率和资源利用率。农机、农艺与信息技术的相互融合,不仅能够有效提高果园株间除草的智能化水平,而且能够实现非接触式避障,使果树幼苗的株间除草成为可能。
2)针对我国不同地区果树品种、种植模式等差异,因地制宜,研究明确避障装置工作参数与除草装置工作参数的最佳组合方式,为株间除草机的设计提供理论基础。
3)研究高效稳定的避障装置,能够在满足快速避障作业的同时保证机体和各工作部件的稳定性。目前,由于果园株间除草作业时,避障装置会有大幅度摆动,前进速度越快,机器稳定性和可操作性会随之下降,需研制摆动惯量小且能够高频避障的避障装置,从而使得机器作业效率和工作稳定性大大提高。
4)向小型化发展。由于果树行间、株间空间有限,大型机械不宜进入果园作业。研制小型机械,不仅能够提高机器的操作性能,使作业过程更加方便,而且能够提高果园的空间利用率,提高果园生产效率。
5)进行模块化设计,针对不同的作业需求,设计相应的功能模块,对于需要实现单一功能作业的需求,通过更换相应的功能模块,从而实现一机多用。对于需要实现多功能作业的需求,对相应的各功能模块进行组合,从而实现一机多能,一次作业就可达到几次作业的效果。通过模块化设计,可极大地提高机器的利用率,节约生产成本。
4 结论
果园株间机械除草技术包括避障装置、除草装置和驱动方式等方面,高效稳定的避障装置是果园株间机械除草技术的核心,除草装置进行实际的除草作业,是实现果园机械除草的基础。智能避障方式的实现,不仅能够提高工作效率,避免对果树的损伤,而且能够降低劳动强度,极大提高作业质量,是农业现代化的重要内容。
我国的果园株间机械除草技术还未能全面推广,智能化除草技术尚处于初级阶段。由于果园建设不合理,果树品种不适于机械化作业等因素的影响,导致一些果园株间机械除草技术难以用于生产实践,间接阻碍了我国株间机械除草技术的发展进程。但随着近年来果树园艺学的发展、新型果园的建设及现代种植户对经济效益的追求,我国优势产区的果园正逐步向规模化和规范化方向发展,果园株间除草机械必将得到更广泛的应用,同时促进我国果园株间除草技术的进步。现阶段,我国果园株间机械除草技术应根据种植区域、果园类型和种植规模研发配套的株间除草机械。果树园艺学的发展为建设高产、高效的新型果园提供了有力的技术支持,适应稳定作业要求的株间避障技术和高速、高效的机械除草技术是我国果园株间机械除草的研究重点。加强农机、农艺和信息技术的深度融合,研究高效稳定的避障装置、小型化及模块化设计,将是我国果园株间机械除草技术的发展方向。
猜你喜欢
今日农业(2022年15期)2022-09-20 06:55:44
趣味(作文与阅读)(2022年3期)2022-06-10 02:12:00
今日农业(2021年21期)2021-11-26 05:07:00
绿色科技(2021年7期)2021-05-10 07:56:32
军事文摘(2020年22期)2021-01-04 02:16:40
今日农业(2020年16期)2020-12-14 15:04:59
西北农林科技大学学报(自然科学版)(2018年7期)2018-07-25 06:54:02
故事作文·低年级(2018年7期)2018-07-19 14:53:22
装备制造技术(2017年3期)2017-05-12 02:15:44
农机化研究(2016年11期)2016-03-23 03:33:47