
基于足球比赛命中率远程采摘机器人监控设计
2020-10-17 01:02鄢先友
农机化研究 2020年5期
鄢先友
(河南牧业经济学院,郑州 450011)
0 引言
源于多种控制算法与控制机理的融入,用数学准确规划与视觉识别的方法实现机器的无人化自动采摘,是我国近年来的重要突破之一。翻阅大量资料可知,为有效控制采摘动作,大多数专家学者采用机械自由度控制及传感器感应原理进行展开设计研究,但对于动作的监控与执行准确度方面研究较少。为此,利用足球比赛命中率的规律与方法,包含足球运动准确性的控制、迅速完成踢球动作的技巧及足球比赛过程中突发性与隐蔽性发挥动作等,对采摘的环境进行监控,以采摘动作执行过程中各部件的协调配合为设计手段,对采摘机器人的远程监控系统进行了探讨。
1 远程采摘原理及结构
远程采摘机器人的采摘原理建立在人工采摘果蔬的基础上,即通过多样化的传感采集功能,经图像处理与识别后转换传输至采摘机器人的中心控制部位,驱动采摘机械臂进行采摘动作,具有良好的通用性与可控性。图1为某农业采摘机器人作业场景。其主要结构包含提供机器人行走与采摘作业的动力源装置、可编程调节的控制器系统、由视觉和触觉得到准确识别的传感器控制系统及采摘驱动装置(执行动作的机械臂)等。

图1 农业采摘机器人作业场景图
一次完成的采摘动作流程可表述为:首先,采摘机械臂进行位姿调整至初始位置,当视觉系统监测到果实的实际位置信息时,采摘机器人的吸附机构与夹持机构相继开始动作;待传感控制系统的压力传感器达到一定的阈值,便传递信号至采摘机械臂进行果实的切断;随后进行果实安放流程与夹持机构复位等环节。采摘机器人动作流程如图2所示。
2 足球命中率机理下的采摘监控设计
2.1 采摘理论模型建立
为充分实现足球比赛命中率与远程采摘机器人监控的有效融合,首先明确足球命中机理的核心控制概念。在足球比赛中,足球命中率高的区域被称之为危险区域。考虑足球比赛球员射门角度的多样性不可预见性,足球的命中率简要定义为:足球射门的角度与足球场地的最大射门角度的比值。依据足球比赛射门命中机理建立如图3所示的足球比赛运动过程数学平面直角坐标系。

图2 采摘机器动作流程简图

图3 足球比赛运动过程数学平面建模
由图3可知,选取地面为xOy面,平面π为球门所在平面,表示为yOz面,t为射门足球经历时间,则对于足球场任意一点A(x0,y0,0)射球入门的命中率为
(1)
其中,对于足球场任意一点A(x0,y0,0),球门的威胁度为
(2)
进一步将足球比赛的关键动作分解,得到如表1所示的足球比赛命中目标下的关键动作与功能,主要包括助跑、支撑脚站位、踢球脚摆动、脚触球及踢球后随前动作等。

表1 足球比赛命中目标下的关键动作表
根据智能采摘动作特点与足球关键动作的相似相控关系,利用图像与动作的处理与衔接,设定x(n,p)为采摘机器人控制变换尺度单元,S(n,p)为采摘机器人控制变换相关性系数,建立远程采摘机器人的监控理论模型为
(3)
在足球比赛命中率理论控制下的采摘模型中,设计出远程采摘机器人监控系统的核心框架,如图4所示。工作中,通过视频采集设备进行信号识别与处理后送至由传感器、A/D转换器和微处理器系统组成的数据预处理系统,再由嵌入式控制指挥动作系统发送到远程采摘监控的终端显示控制系统,实现监控作业全程视频显示、信息实时更新与音频信号的准确捕捉与调节。
2.2 软件监控系统建立
足球命中率控制机理下的远程智能采摘监控,需匹配完整合理的采摘信息数据转换与处理方法,故以监控界面显示、应用逻辑控制和监控服务信息访问3个层次进行流程梳理,如图5所示。

图4 远程采摘机器人监控系统设计框架

图5 足球比赛命中率机理下的采摘机器人远程监控系统
其中,A.SP.NETC#与CSSJavaScript间实现数据的互相调用与共享,经监控服务信息访问模块的信息获取与数据服务接口实现采摘监控信息引用目标。
对智能采摘的各个控制动作进行软件后台编码分配与程序指令给定,此处编制远程采摘监控系统的多通道数据传输的关键程序代码为:
……
int sockfd;
struct sockaddr_in_addr;
sockfd=socket(AF_INET,SOCK_DGRAM,0);
if(sockfd<0)
{
printf(“0-”);
printf(“Socket Error ”);
exit(1);
}
bzero(&addr,sizeof(struct sockaddr_in));
addr.sin_family=AF_INET;
addr.sin_addr.s_addr=htonl(INADDR_ANY);
addr.sin_port= htonl(SERVER_PORT);
int nCn=bind(sockfd,(struct sockaddr*)&
addr,sizeof(struct sockaddr_in));
if(nCn<0)
{
exit(1);
}
udps_respon(sockfd,m_param.width,
m_param.height);
……
进一步对远程采摘的监控软件系统步骤进行合理划分(见表2),依据主要作用的实现可划分为7个主要实施步骤。其中,加密模块与安全模块是在一站式信息监控模型下的附属,其存在可有效保证智能采摘机器人远程监控系统的稳定性与可靠性。

表2 远程采摘机器人监控软件系统主要步骤设置

续表2
2.3 硬件配置控制设计
在采摘机器人的远程监控硬件配置环节,关键在于选型与组装:CMOS摄像装置作为主要的采摘果实图像输出装置,RFID读卡装置、USB摄像装置和TFTLCD共同组成DM3730型信息交换装置,并在DM9000C网卡的连接下,应用TCP/IP协议实现PC的终端准确实时化显示,其配置连接如图6所示。
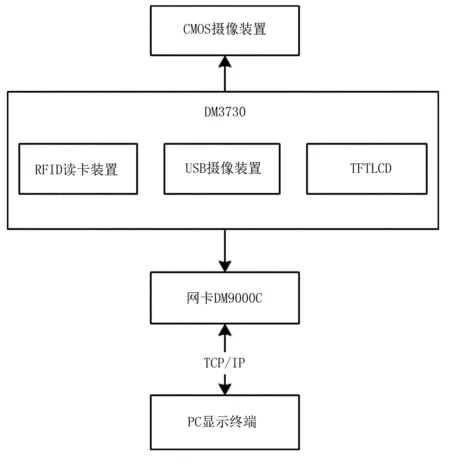
图6 足球命中率机理下远程采摘监控系统配置连接图
3 采摘监控系统试验
3.1 条件设置
针对足球比赛命中率机理下的远程采摘机器人监控试验,数据交互与处理进行如下设置:
1)采摘实时监控界面与图像服务功能交互;
2)采摘实时监控界面与数据服务接口交互;
3)采摘监控系统历史服务器与数据服务接口交互;
4)采摘监控系统历史服务器与其他高级服务接口交互;
5)数据服务接口与数据指令解析服务交互等。
3.2 试验分析
以一组采摘动作为试验标准,基于足球比赛命中率的采摘机器人作业监控试验主要过程图像监控抓拍。试验时,从采摘机器人的初始定位入手,经过路径的找寻与规划调整,达到果实的采摘动作执行,包括吸附与夹持及切断,最终实现采摘果实的指定化安放与采摘机构的卸果复位。
在选择采摘机器人的步进电机转速一定范围内(250~300r/min)进行采摘的远程监控试验,得出如表3所示的关键采摘评价指标。由表3可知:足球比赛命中率机理被应用于采摘机器人的远程监控系统,采摘时间可提升0.04s,与之前采摘速度保持一致;由于足球命中率技术的融入,采摘作业的采摘损伤率大幅度降低,由设计前的0.53%降至0.26%,采摘成功率由设计前的92.42%提高至94.29%,这说明设计可行且改善效果明显。

表3 基于足球命中率的远程采摘机器人监控系统数据统计
4 结论
1) 通过理解足球赛场上的射门命中率原理,依据采摘机器人采摘动作控制结构及特点,将两者融合对远程采摘机器人的监控系统进行设计。
2) 建立合理的足球比赛命中率控制方法下的采摘监控理论模型,并进行软件系统后台指令控制和硬件采摘控制设施匹配,实现了完整采摘机器人远程监控。
3)试验结果表明:结合足球命中率的采摘监控系统设计,采摘的综合效率可提升1.69%,可为其他农用智能设备的改善与优化提供参考和借鉴。
猜你喜欢
作文小学高年级(2022年9期)2022-10-17
建材发展导向(2021年14期)2021-08-23
中国煤层气(2019年2期)2019-08-27
中国生殖健康(2019年11期)2019-01-07
长江丛刊(2018年31期)2018-12-05
启蒙(3-7岁)(2018年9期)2018-08-30
小雪花·成长指南(2017年4期)2017-06-12
小雪花·成长指南(2017年5期)2017-06-07
NBA特刊(2017年8期)2017-06-05
环境与可持续发展(2017年2期)2017-04-06
