核电站乏燃料水池操作机及专用抓具电气控制系统的分析
2020-10-16 09:53庞研,庞毅
机械管理开发 2020年10期
庞 研, 庞 毅
(太原重工股份有限公司, 山西 太原 030024)
引言
乏燃料水池操作机及专用抓具是核电站乏组件工艺运输系统的关键设备之一,位于核岛厂房内的乏燃料贮存水池大厅。乏燃料水池操作机及专用抓具控制系统的功能为:以电力驱动乏燃料水池操作机,在水池大厅操作范围内指定位置对乏组件、控制棒组件、破损组件密封罐、薄壁密封筒进行转运。
1 控制系统的组成及功能
1.1 控制系统的组成
乏燃料水池操作机及专用抓具的电气控制系统主要由程序控制、伺服驱动、外部检测、低压配电等部分组成。程序控制部分包括SimitionD 运动控制器、CPU、数字量输入/输出模块和模拟量输入输出模块、一体式上位机以及网络交换机。伺服驱动部分包括整流回馈装置、起升机构逆变器、大车机构逆变器、小车机构逆变器、起升伺服电机、大车伺服电机、小车伺服电机。外部检测元件包括起升拉线式编码器、大车WCS 位置编码系统、小车WCS 位置编码系统、卷筒绝对值编码器、称重测量装置、外部限位等。低压配电部分包括常用的断路器、接触器、开关电源等[1-2],见图1。
1.2 控制系统的功能
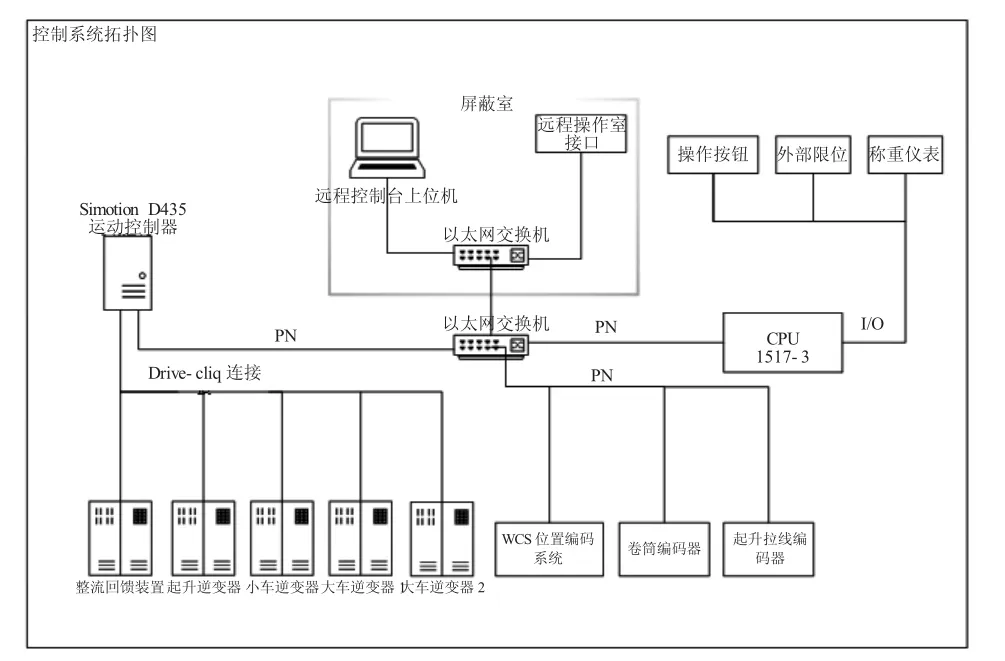
图1 控制系统拓扑结构简图
程序控制部分包括PLC 与SimotionD 运动控制器,SimotionD 用于各机构的运动控制,PLC 用于乏燃料水池操作机各处信号的采集和处理、控制系统逻辑程序的处理和执行。两者之间通过Profinet 进行通讯,相比其他类型的通讯方式更为快速稳定。现场的机械限位等信号通过硬线形式接入PLC 的IO输入模块,位置测量装置信号通过通讯形式接入PLC。一体式上位机置于屏蔽室的远程控制台上,作为重要的人机交互界面。上位机用来显示乏燃料水池操作机的实时状态、历史记录和故障报警,并参与控制,操作员可以在上位机处进行运行位置选取、启动命令、故障确认和复位等操作。只要上位机处在运行状态,乏燃料水池操作机所有重要的状态、报警和操作都会被记录,并随时可以查看历史记录,方便故障追溯。网络交换机是控制系统的通讯总线辅助设备[3],用来将乏燃料水池操作机控制系统中所用的Profinet 总线设备连接至总线,最终接入PLC 及SimotionD 运行控制器。在操作机上和远程控制台处各设置一个。
整流回馈装置将380VAC 进线电源转换为540VDC 两线作为直流母线提供给各机构逆变器,并将各机构制动能量反馈回电网。其能够对直流母线电压进行调节,即使电网电压波动也可以保持整流母线电压的稳定。逆变器由SimotionD 运动控制器控制,将直流电逆变为三相交流电,通过对频率的改变,控制伺服电机的运行和速度调节。
外部检测部分为各机构提供精确的位置反馈信息及安全保护。起升拉线式编码器为起升机构提供精确的位置反馈信息。运行机构WCS 线性绝对值位置编码系统为运行机构提供精确的位置反馈信息。称量装置能精确测量起吊重量并提供超载保护,当起吊重量为90%、100%、110%时,会发出报警,同时能输出4~20 mA 重量信号至PLC[4]。
配电控制部分为其他各部分提供保护,包括过压保护、欠压保护、过载保护、短路保护等,防止设备因内部故障或外部电路问题而损坏,见图2。
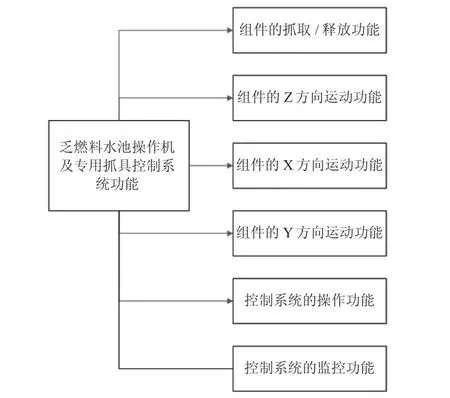
图2 控制系统功能
2 控制原理
在乏燃料水池操作机的高精度定位要求和安全性要求下,由于机械传动误差、干扰等问题的存在,传统的开环控制和速度控制已经很难满足定位控制的精度指标,因此需要采用伺服电机,采用高精度的全闭环位置控制。
伺服系统采用西门子运动控制系统SimotionD。它是基于驱动的运动控制系统。SimotionD 是集成了西门子S120 伺服驱动器的一个控制单元,可以方便与S120 驱动器的电机组件连接并带有编码器接口、PN 接口等控制通讯接口。
根据本设备机械结构,在运动控制器内部为起升和行走机构的4 个电机分别建立实轴,再建立起升、大车、小车3 个虚拟轴,令4 个实轴完全跟随虚拟轴而动作,实现同步。其中起升和小车为1 个实轴跟随1 个虚拟轴,大车为2 个实轴跟随1 个虚拟轴。
建立XYZ 空间坐标系,以大车运行方向为X 方向,小车运行方向为Y 方向,起升为Z 方向,XYZ 的位置由WCS 位置编码系统和起升的拉线式编码器提供,使每一个工作位置都有独有准确的位置参数提供给Simotion 运动控制器。
在SimotionD 内需要通过MCC 语言编程来实现对轴的控制,包括起动、同步、定位、停止、信号处理等功能。运动控制器的逻辑控制部分将启动信号、位置指令和运行速度传输至内部伺服驱动部分,驱动部分的MCC 程序接收后将虚拟轴和实轴同步,起动虚轴,按照预设的加速度加速至接收到的运行速度向指定位置运行。在接近指定位置时会自动减速,到达指定位置时将减至零速,然后进行微调,消除整车惯性影响,最终定位。
3 电气安全保护功能
3.1 电气安全保护功能
1)进线电源过流保护功能:乏燃料水池操作机的进线电源经过一个带过流保护的断路器后接入整流回馈装置。当控制系统过流时,断路器的过流保护触发,将断路器分断,切断电源,避免过流损坏设备。
2)起升机构超速保护功能:通过起升电机上的超速开关可以设定电机最大转速值,当起升电机转速超过设定值时,超速开关动作并发出报警信号至运动控制器,起升机构停止运行,制动器抱闸。
3)起升机构超载保护功能:起升机构设置两个称重传感器,配有电子秤,它具有重量显示、失重保护、超载限制的功能。当起升机构负载超过电子秤设定的重量报警值时,电子秤将报警信号发至系统控制器,起升机构将被限制上升功能,以保护设备。
4)起升机构卷筒断轴保护功能:在卷筒下部设置支承板,卷筒轴断后卷筒支承在支承板上,触发卷筒断轴保护限位开关,信号传输至运动控制器,引发控制器报警,起升机构停止运行,制动器抱闸。
5)起升机构钢丝绳防叠绕保护功能:起升机构于卷筒处设置防叠绕限位,安装在防叠绕装置上,当卷筒上缠绕的钢丝绳因跳槽等原因而出现叠绕时,开关动作,信号传输至运动控制器,引发控制器报警,起升机构停止运行,制动器抱闸。
6)起升机构过行程保护功能:起升机构包含重锤限位、旋转限位等行程保护设备,使起升机构始终运行在一个设定号的范围内,防止出现起升机构过卷的情况。当起升机构运行至上下极限时,控制系统将使起升机构停止向该方向继续运行,保障起升的安全。
7)起升机构安全制动器保护功能:安全制动器安装在卷筒轴上制动盘上,同时有一套检测系统配套,当检测系统检测到120%超速、传动链损坏、停电或事故断电时,控制系统立即控制安全制动器上闸。在起升机构传动链损坏后,可以使负载停止在20 cm的距离以内,确保负载不会因意外事故而坠落。
8)起升机构电机过热保护功能:起升电机内部设置一组过热保护,当电机温度超过过热保护元件的设定值时,过热保护将发出报警信号至运动控制器,引发控制器报警,起升机构停止运行[6]。
9)小车机构过行程保护功能:小车机构包含接近开关限位、WCS 位置编码系统等行程保护设备,使小车机构始终运行在一个设定好的范围内,设置出一个小车运行的安全区域。当小车机构运行至极限时,控制系统将使小车机构停止向该方向继续运行,保障小车运行的安全。
10)小车机构电机过热保护功能:小车电机内部设置一组过热保护,当电机温度超过过热保护元件的设定值时,过热保护将发出报警信号至运动控制器,引发控制器报警,小车机构停止运行。
11)大车机构过行程保护功能:大车机构包含接近开关限位、WCS 位置编码系统等行程保护设备,使大车机构始终运行在一个设定好的范围内,设置出一个大车运行的安全区域。当大车机构运行至极限时,控制系统将使大车机构停止向该方向继续运行,保障大车运行的安全[6]。
12)大车机构电机过热保护功能:大车每个电机内部设置一组过热保护,当电机温度超过过热保护元件的设定值时,过热保护将发出报警信号至运动控制器,引发控制器报警,大车机构停止运行。
13)控制紧急停止功能:在意外情况发生时,乏燃料水池操作机的运行可以由操作员通过设置在人桥操作平台或乏组件运输控制室内的急停按钮切断操作机动力电源,停止当前操作机的动作,避免事故的发生。所设置的急停开关不区分优先级,任一地点的急停开关均可对水池操作机执行断电动作。
3.2 联锁保护功能
1)各机构动作使能条件联锁:乏燃料水池操作机的每个机构运行时,程序中均有逻辑使能的联锁,对该机构的状态信息进行检查,只有该机构的所有信号均正常、满足运行条件时,程序才会使能该机构,进行正常动作。若不满足逻辑使能的联锁,操作机将不会使能该机构,并在上位机中发出报警指示,将缺少条件告知操作员。
2)各机构之间动作运行互锁:操作机的起升机构、大车机构、小车机构三个机构通过程序联锁,无论在何种操作方式中,每个机构均可单独运行,不会出现两个机构同时运行的情况。
3)各机构运行范围联锁:起升机构通过拉线编码器、旋转限位等信号的程序联锁,将起升的Z 向运行控制在允许的范围内。大车和小车机构通过位置编码系统、行程限位等信号的程序联锁,将X 向和Y向的运行控制在允许的范围内。并根据工艺流程需求设定操作机运行的安全区域,使乏燃料水池操作机的运行被限定在设定好的安全区域中。
4)操作机与燃料转运系统的联锁:乏燃料水池操作机的控制系统与燃料转运系统通过Profinet 总线以及控制电缆相连进行信号交互,操作机将状态信息和故障信息传给燃料转运系统,燃料转运系统将控制信号、工作指令等传给操作机实现远程联锁控制。
4 结语
乏燃料水池操作机是核电站乏燃料转运的关键设备之一,对电气控制系统有着很高的要求,本文从控制系统组成、控制系统功能、控制原理及电气安全保护几个方面对它进行了介绍,让大家对核电站该类起重机的电气控制系统有一个清晰的认识,特别要认识到核电类起重机对高精度定位的需求和安全性方面的超高要求,以更好地研发乏燃料水池操作及专用抓具电气控制。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
中国修船(2022年2期)2022-04-28
快乐语文(2020年36期)2021-01-14
重型机械(2020年2期)2020-07-24
哈尔滨轴承(2020年4期)2020-03-17
中国特种设备安全(2018年10期)2018-12-18
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
启蒙(3-7岁)(2017年9期)2017-02-26
新疆钢铁(2016年1期)2016-08-03