随机数据驱动下的两区域系统惯量估计
2020-10-16 01:44:08陈志杰杨德友赵芳琦
东北电力大学学报 2020年4期
陈志杰,杨德友,赵芳琦
(东北电力大学电气工程学院,吉林 吉林 132012)
电力系统惯性决定了系统在短时功率不平衡情况下保持同步的能力,对系统的暂态稳定、频率稳定、保护继电器等动态行为起着至关重要的作用[1].随着水能、风能、太阳能等清洁能源发电量的日益增加[2],一方面大幅度降低了火力发电给环境带来的污染,减小了我们对不可再生能源(如煤)的依赖,促进了能源与环境的可持续发展;另一方面,电力系统的能源结构正发生着巨大的变化,新能源发电在电网中占据越来越重要的地位,并对电网运行产生愈加突出的影响.目前,风力发电在全国甚至全球范围内呈现大规模、高增速的发展态势[3],而其转子转速与系统频率解耦,导致系统等效惯量大幅度降低,频率变化的初始速率增加,这对系统频率的控制造成严重干扰.而估计系统的等效惯量可以及时的检测系统特性,从而做出相应的调整,降低新能源并网给系统带来的威胁.
对系统等效惯性常数估计的研究是从上世纪末开始的,针对某个系统,从不同侧重点出发,一些文献采用不同的方法对系统惯性常数进行估计.文献[4]提出了一种基于多项式逼近的惯性常数计算方法.文献[5,6]中,基于相量测量单元(PMU)测量的有功功率和频率变化率,提出了在线惯性估计的摆动方程.文献[7,8]中,摆动方程用于基于已知干扰大小的离线惯性估计.文献[9]由PMU测量的随机频率和有功功率信号来估计电力系统有效惯性.文献[10]采用分块处理的方法,利用PMU测量的数据对各个区域的惯量进行计算,然后再等效出系统总惯量,但未考虑PMU放置对准确观测系统损失的影响.文献[11]基于PMU测量发电机端电压和电流相量来计算Thévenin等效(TE)参数和系统惯性常数.文献[12]将粒子群优化算法(PSO)应用于基于摇摆方程的最小代价函数,它使用了发电机母线的总发电量以及电压和频率数据,具有较高的精度和较好的鲁棒性.文献[13]利用过去收集的频率,负载和工厂停运事故的数据分析并确定每次事故的系统惯性.文献[1]通过闭环传递函数来建立与系统惯量的联系.
目前所研究的惯性估计的数据来源大部分是基于大扰动的数据,它不仅对电力系统的安全性产生负面影响,而且对用于估计的数据也有诸多的限制.本文采用基于小扰动的惯量估计,直接提取系统中的随机数据,能较好的反应系统惯性的变化,在安全性和数据处理方面比大扰动的惯量估计方法更有效.仿真结果表明,本文提出的方法对两区域系统的惯量有较高的精准度,验证了所提方法的有效性.
1 环境激励下的发电机惯量
在实际电网中,系统的负荷不断变化,输电线路随天气变化而导致的线路电抗不断变化(线间距离随风摆动等),新能源发电系统随环境变化而引起的有功输出不断变化,这些因素都导致电力系统每时每刻都受到小的干扰,这对系统的稳定运行带来了巨大的威胁,惯量作为发电机的重要参数,可以反映系统特性,根据实时检测系统的惯量,可以对系统做出相应的调整,降低各种小干扰对系统造成的影响.
以负荷随机变化为例,推导出系统状态变量(如发电机的角速度和功角等等)的时域解析表达式[14]为
(1)
公式中:u为随机波动变量;δ为系统噪声强度;ξ为独立的高斯随机分布向量.通过分析公式(1)得出,负荷的时域解析表达式由动态响应和噪声信号组成,包含着大量的系统机电振荡参数信息.实际系统中采用同步测量单元(PMU)来获得系统随机响应的数据,利用系统辨识理论,通过对虚拟状态矩阵的分析得到相应的模态参数,然后对系统的惯量进行估计.
发电机的转子运动方程在电力系统的动态过程中起着重要的作用,本文采用同步发电机经典二阶模型,忽略原动机及调速器动态,忽略励磁系统动态,以此来建立模态参数和系统惯量的联系,其方程可表示为

(2)
(3)
公式中:δ为功角;ω为实际角速度;ωn为额定角速度;H为系统惯性常数;Pm为机械功率;Pe为电磁功率;D为系统阻尼;Δω为角速度变化量.一般情况下,由于原动机机械惯性较大,时间较短,可认为原动机输入的机械转矩基本不变,即Pm为常数,而系统阻尼D受负载、控制器、网络结构等因素的影响是不可控的.
在扰动较小的情况下,可通过线性化的转子运动方程来系统惯性.其线性化的方程为

(4)
(5)
拉普拉斯变换之后的频域方程可以表示为
sΔδ(s)=Δω(s)ωn,
(6)
2HsΔω(s)=ΔPm-Pe0cot(δ0)Δδ(s)-DΔω(s),
(7)
公式中:s为拉普拉斯算子;Pe0和δ0分别为有功功率和功角的初始值.线性方程组表明,功角和角速度成正比,在这里采用Δω(s)为状态变量,则方程组变为
2HΔω(s)s2+DΔω(s)s+ωnPe0cot(δ0)Δω(s)=ΔPms.
(8)
因为ΔPm在惯性响应中大约等于零,通过特征方程求出特征值,即
(9)
根据单机无穷大的模态分析理论,特征值的实部对应于机电振荡的衰减系数,虚部对应于振荡角频率[15].因此系统等效参数与机电振荡参数之间的关系可以表示为
(10)
(11)
公式中:α为衰减系数;fd为振荡频率,Hz.
通过上述分析,可以通过机电模态参数和潮流数据来估计系统的惯性,同时也可以得到系统的阻尼系数.
2 基于发电机角速度的惯量估计
前节以单机无穷大模型为基础推导了机电振荡参数和惯量的关系,而实际系统则是复杂的,如何将上述理论与实际电网联系起来求出系统惯量变得至关重要.
考虑到实际电网的复杂性,直接计算系统惯量几乎是不可能的,而且计算量非常繁琐,使得估计结果没有意义,因此,需要对互联系统进行简化,以全局的角度估计大规模系统的惯量.上一节是在单机无穷大的基础上,对惯量进行推导,所以,可以近似的将互联的系统等效为两区域系统.对于互联的两区系统,当某一区域的角速度增加时,根据能量守恒,另一个区域的角速度一定减小.对于实际的电力系统,可将具有相同运动方向和相反运动方向的发电机角速度简化成双区域系统.具体的简化过程如下:
(1)通过模态分析计算每台发电机角速度的变化情况,将整个系统分为两个区域.
(2)化简网络结构.同一区域的发电机角速度变化趋势和性质较为接近,可认为是一组发电机,对于给定的扰动,一组发电机在允许误差范围内是相干的,并且其端电压具有恒定的复数比b[16],使得
|ωi-ωj|≤ξ,
(12)

(13)
根据系统的节点电压方程,利用公式(13)的电压关系,由文献[16]可将n阶电压方程简化成两阶矩阵
(14)
可将网络等效到两条发电机端母线上,其母线之间的电抗x′e=Im(1/Y′12).
(3)将同一区域的发电机组用一台等值机表示.系统中发电机内电势与其出口母线电压的关系为
(15)
公式中:Z为发电机内电抗.由公式(13)和公式(15)可将发电机j与发电机i等效为
(16)
等效后发电机的其他参数为
(17)

图1 等效两区域电力系统
由导纳阵的互导纳和发电机的等效内电抗可求出整个系统的等效电抗.等效结果如图1所示.
两区域系统中,以相角差和角速度差作为状态变量时,其等效转子运动方程与第一章的理论推导过程一致.因此,可以通过机电模态参数来获得实际系统的等效惯性.
区域1和区域2相角差和角速度差的动态过程反映了两个区域之间的相对运动,即区间模式.所以,可以使用区间振荡参数估计互联系统的惯性.分别用Ptl0(稳态时的联络线功率)和δe0(稳态时的等效相角)代替公式(10)中的Pe0和δ0.区域间的联络线传输功率也相应的等效到一条联络线上,即:稳态时总传输有功功率(Ptl0)等于所有的联络线功率之和.即
(18)
稳态时的母线电压幅度约等于1p.u.,δe0可以根据系统等效电抗(Xe)计算,可表示成
δe0=sin-1(Ptl0Xe).
(19)
联立公式(10)和公式(11)得系统的等效惯量为
(20)

图2 惯量估计流程图
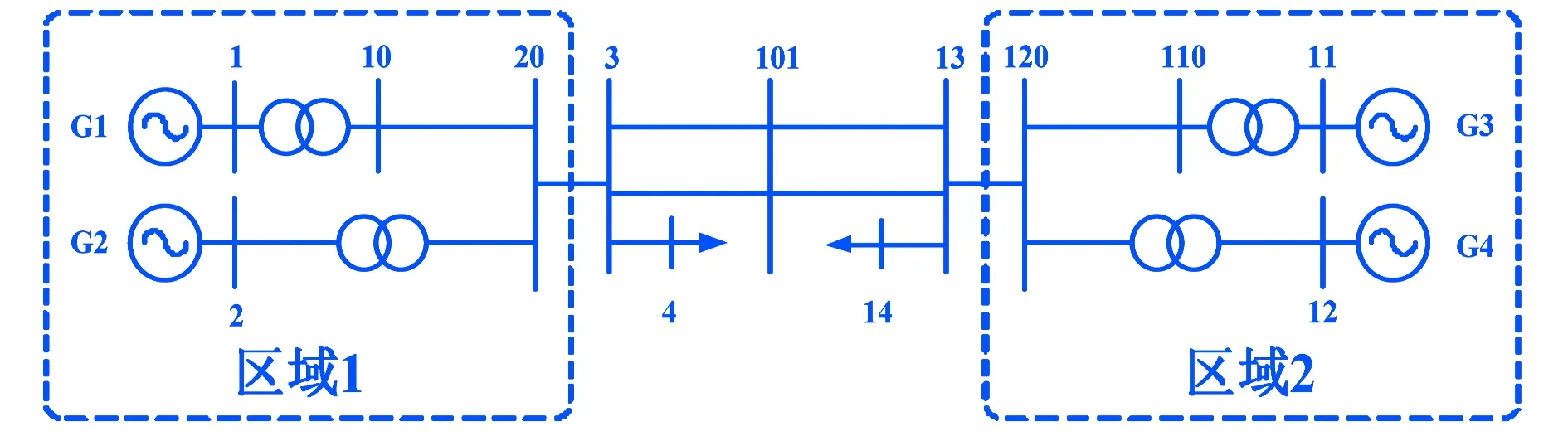
图3 IEEE四机两区系统接线图
通过辨识相关的振荡参数可由公式(20)求出系统的惯量,惯量估计流程图,如图2所示.具体的步骤如下:
Step1以随机响应中的角速度为数据基础,采用随机子空间法(SSI)辨识机电振荡的特征参数;
Step2选取数据中区间振荡模式的振荡频率和对应的特征值;
Step3根据潮流分析,得到系统联络线上的传输功率;
Step4化简系统网络,求出系统等效电抗(网络等值电抗和发电机等值电抗);
Step5根据系统等效电抗计算出稳态下的等效相角;
Step6根据上述参数计算系统惯量.
3 算例分析与验证
针对本文提出的方法,用IEEE四机两区域系统
的弱阻尼模式对惯量进行计算,并与标准惯量进行对比;修改系统参数,对比多组数据估计结果,验证其有效性.
3.1 基础方式估计
经典的IEEE四机两区域互联系统结构,如图3所示.
图3中有四台发电机,分别在两个区域中,之间用一条双回路联络线连接.其各自的惯量在900 MW容量如表1所示.

表1 四机系统发电机惯量
四台发电机的角速度(ωd)随时间变化的波形如图4所示.
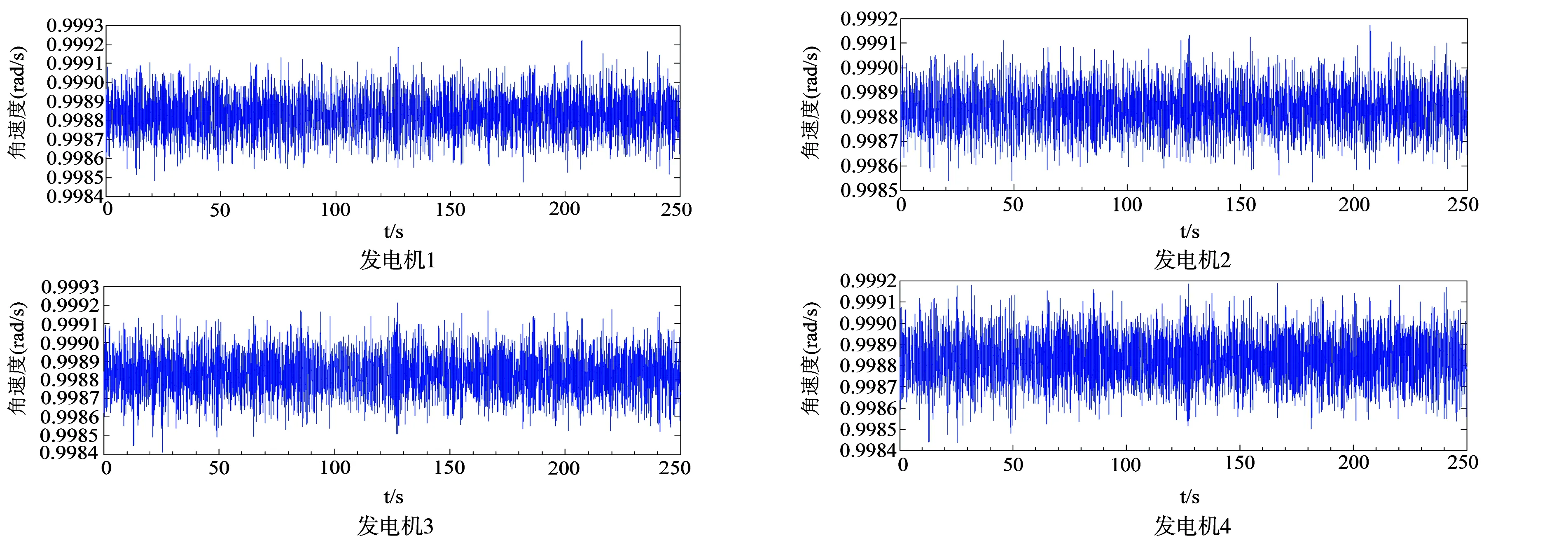
图4 4机角速度的时序数据
选取了四台发电机的角速度250秒的随机数据如图4所示,从图4中可以看出,由于系统受到各种小干扰,发电机G1~发电机G4的角速度均存在类噪声.将各发电机角速度变化数据作为随机子空间算法[17]的输入数据,对系统进行辨识,根据奇异值分解计算结果中相邻变化最大的阶数作为SSI辨识过程中的阶数,辨识结果如表2所示.

表2 4机系统辨识结果
由表2可知,该系统有两个本地模式,一个区间模式,本文采用区间模式的数据对惯量进行估计.四机系统的电抗如图5所示.

图5 四机两区系统电抗
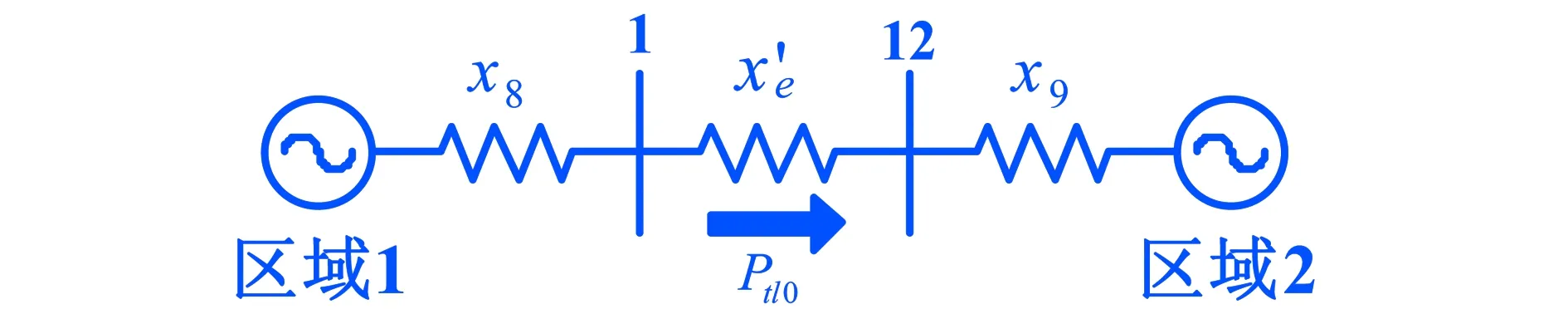
图6 四机系统等效图
图5中XT1~XT4为变压器电抗,X1~X7为线路阻抗.根据图5的系统电抗图,由上一章提出的等效方法将系统等效如图6所示.
四机两区域系统只有一条联络线,图6将区域1的发电机等效成一台并连接到母线1上,将区域2的发电机等效成一台并连接到母线12上,X8、X9为等效发电机电抗,X′e为网络等效电抗,传输功率的方向为从左到右,得出系统的等效电抗Xe=x′e+x8+x9=0.213 1.
对系统进行潮流分析得联络线的传输功率Ptl0=3.979 8,额定角速度ωn=2π×50=100π.根据公式(20)求出系统等效惯量H=3.166 8(基准容量为900 MW).
为了更好地体现估计结果与标准惯量的差距,这里给出了一个误差
(21)
公式中:Hg为采用本文的估计方法算出来的惯量;H0为系统的标准惯量,误差M为估计出的惯量与标准惯量的偏差,其比较结果如表3所示.

表3 4机系统惯量估计的结果

图7 四机系统惯量对比结果
根据表3可知,由机电振荡参数估计的惯量有很高的精准度,验证了该方法在两区域系统中的可行性.其误差的来源:一方面采用SSI辨识出的数据存在一定的误差,另一方面求取系统等效电抗的方法可能有偏差.
3.2 改变运行方式
对于实际电网,负荷和新能源的输出功率时刻都在变化,使电网的运行方式变得复杂多变,为了验证该方法对两区域系统具有普适性,假设发电机的惯量在标准惯量(3.25)附近发生改变,重新估计系统的惯量,如图7所示.
由图7可知,估计值随着系统参数的变化与真实值一直保持相当高的吻合度,而且估计的结果都比真实值小一些,估计的误差小,精确度高.
4 结 论
不同于其他文献提出的基于PMU测得的数据,本文提出了采用机电振荡参数估计系统等效惯量的新方法,利用多组惯量数据在IEEE4机两区域系统上进行了验证,计算结果表明:
(1)采用随机数据估计两区域系统的惯量,有较高的精度;
(2)当系统的运行方式发生变化时,该方法估计的结果依然可靠,能实时地感知系统的动态,为调度运行人员监测系统的变化提供依据.
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
大电机技术(2022年3期)2022-08-06 07:48:32
现代电力(2022年2期)2022-05-23 12:46:16
防爆电机(2021年1期)2021-03-29 03:02:26
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
中国铁道科学(2015年4期)2015-06-21 06:46:06