
改进粒子群算法的组网雷达协同干扰资源分配*
2020-10-16 08:47戴少怀杨革文康传华
航天电子对抗 2020年4期
戴少怀,杨革文,李 旻,康传华,钟 昭
(上海机电工程研究所,上海201109)
0 引言
随着电子对抗技术的发展,组网雷达已经对飞机编队执行突防和突击任务构成很大威胁,对突防方而言,为提高作战飞机突防概率,降低己方力量的消耗,需要对组网雷达进行有效干扰。在干扰资源有限的条件下,对组网雷达进行协同干扰,合理分配干扰资源,才能达到最佳的干扰效果[1-3]。
文献[4―6]分别对遗传算法进行改进,实现干扰资源的合理分配,一定程度上减小了算法的收敛误差,提高了寻优概率,但是增加了算法迭代时间,降低了干扰的实时性要求;文献[7]利用博弈论的方法研究干扰资源的分配问题,综合各干扰机的干扰效益,提出了迭代干扰策略选择算法,在解决低复杂度问题时该算法具有较快的收敛速度,当雷达数量结合干扰资源较多时,算法性能就会出现严重衰减;文献[8]将布谷鸟算法用于协同干扰问题,实现了干扰机自主分配和干扰样式最优决策,算法在提高了收敛稳定性的同时,牺牲了算法的收敛速度;文献[9]围绕组网雷达检测概率和定位精度2 个指标,建立基于多目标优化的协同干扰决策任务模型,通过对人工蜂群算法增加自适应交叉运算,提高了该算法的寻优速度,但未解决算法易陷入局部最优问题。综合以上分析,现有的组网雷达干扰资源分配方法普遍存在迭代次数多,寻优概率不高等问题,难以满足实际工程应用的需求。
本文针对组网雷达干扰机分配问题,采用合理的组网雷达干扰效果评估指标,构建协同干扰效益数学模型,提出一种改进的二进制粒子群(improved binary particle swarm optimization,IBPSO)算法实现 干 扰效益最大化。IBPSO 算法采用Logistic 混沌映射的方法均匀化初始粒子群,提高初始粒子群的平均适应度,通过动态调整学习因子和速度向量化更新的方式,提高算法的迭代效率和寻优概率。
1 干扰资源分配数学模型
针对组网雷达干扰效果评估的方法有很多[10],这里选择模糊综合评判法衡量协同干扰资源分配的干扰效果,综合文献[11]和文献[12]雷达干扰效果评估指标,选择干扰功率、干扰频率、干扰样式和干扰时机等四个指标构建干扰效益评估矩阵E。根据文献[10]可计算各指标的隶属度函数,四个指标分别用Ga、Gb、Gc、Gd表示。
假设当前己方干扰机数量为m,对方雷达组网中待干扰雷达数量为n,计算各指标的隶属度函数,可以得到第i 部干扰机对某雷达干扰效益隶属度向量:

此时,m 个干扰机对某一部雷达干扰效益矩阵可以表示为:

在实际衡量干扰效果时,为保证评估结果的可靠性与合理性,不同指标在评估过程中的权重是不一样的,这里根据专家经验设四个不同指标的权重为:

此时,m 个干扰机对某一部雷达的实际干扰效益矩阵为:
雷达组网中待干扰雷达数量为n,可以依次求得ej( j=1,2,…,n),则干扰波形对雷达干扰效益评估矩阵为E=[e′],可以展开为:

式中,E 表示对组网雷达协同干扰时获得的干扰效益评估矩阵,eij代表综合四个指标,干扰机i 对雷达j 的干扰效益值。
干扰效益评估矩阵E 表示的是协同干扰过程中,各干扰机对不同雷达的干扰效益值,组网中雷达威胁矩阵W =[w1,w2,…,wn],wj(1≤j ≤n)表示组网中雷达j 的威胁程度,主要根据雷达j 当前工作状态确定。为实现在某一干扰机分配方案下,干扰效益最大化,需要优化分配矩阵,待优化的目标函数:

式中,xij为分配矩阵元素,取值为0 或1,xij=1 表示分配干扰机i 对雷达j 进行干扰,否则不进行干扰;eij表示干扰机i 对雷达j 的综合干扰效益。
在实际协同干扰作战过程中,由于自身干扰资源的限制,每部干扰机在同一时段能干扰的雷达数量是有限的,设同一时段一部干扰机最多能对εi部雷达进行干扰;每部目标雷达至少分配一部干扰机,此时,对目标函数(6)构成的约束条件:
综上分析,组网雷达协同干扰决策问题是一个多参数、多约束、非连续的整数规划问题。随着分配规模的增加,需要采用群体智能算法对分配过程进行优化求解。粒子群算法作为典型的启发式算法,具有收敛能力强、易于实现等优点,但算法存在迭代次数多、寻优概率不高等问题,这里对粒子群算法进行改进,以克服算法本身的不足。
2 改进的粒子群算法
2.1 PSO 算法
粒子群算法是一种受启发于鸟群觅食的进化算法。PSO 算法中每个粒子的位置代表一个D 维空间中的解,每个粒子存在自学习和社会学习的能力,并逐代更新自身速度和位置,根据粒子适应度评价当前位置的优劣,使粒子群能够在整个解空间中寻找到全局最优解[13-15]。
在每次迭代过程中,粒子会根据由学习因子控制的个体极值pbest 和全局最优值gbest 的引导逐次更新自身的速度和位置。粒子的速度和位置更新方式如式(8)―(9):

式中,vid和Xid代表粒子i 在d 维的速度和位置(1≤d ≤D,D 为 粒 子维度),k 表示当 前迭代次数,pbestid表示粒子i 在d 维的历史最优值,gbestid表示当前粒子群中d 维的全局最优值,ω 表示保留当前速度的惯性权重,c1和c2分别表示自学习因子和社会学习因子,r1和r2为[0~1]区间的两个随机数。
2.2 BPSO 算法局限性分析
粒子群算法只适用于连续空间的优化问题,在离散空间无法实现搜索迭代,为采用粒子群算法解决离散空间的目标优化问题,文献[13]设计一种BPSO 算法,其速度更新公式不变,位置信息被离散为二进制0或1,相应的更新迭代公式调整为:

式中,ξ 为区间[0~1] 服从均匀分布的随机数,S(vid(k+1))为将速度变量映射为(0~1)之间的sigmoid 函数。

传统的BPSO 算法主要存在以下几方面的问题:1)粒子群中粒子个体利用率不高。BPSO 算法缺乏有效的粒子群初始化方式,随机初始化产生的粒子群无法保证在解空间分布的均匀性和多样性,导致算法易陷入局部最优。2)解出现趋同现象。随着迭代次数递增,在迭代后期,速度经过sigmoid 函数映射后不断趋近于1,使得位置取值为1 的概率趋近于100%,粒子取值趋于同向变化。3)速度更新过程中学习方向固化。在进行速度更新时,采用固定不变的自主学习因子和社会学习因子,对粒子个体极值和全局最优值的学习偏重维持不变,易陷入局部最优。
2.3 BPSO 算法的改进
2.3.1 Logistic 混沌初始化
标准的BPSO 算法中采用随机初始化的方式产生初始粒子,初始粒子群在解空间分布的均匀性对最终收敛精度有一定影响。这里引入Logistic 混沌映射的方法,利用其遍历性和非周期性,初始化粒子种群,使得初始种群均匀分布于解空间。Logistic 混沌映射是一种产生混沌序列的非线性映射[16-17],可以表示为:

式中,yt为第t 次迭代粒子位置的混沌变量,其取值范围为[0~1];T 为最大迭代次数;μ 为控制参数,若μ=4,则系统处于完全混沌状态,且产生的混沌变量均属于区间[0~1]。
这里,在文献[18]的基础上,采用四舍五入的方式,对式(12)的混沌映射结果进行二值化修正处理,修正公式为:

式中,round 为取整函数;xn+1为修正后的粒子位置变量。
为比较Logistic 混沌映射初始化方式和随机初始化方式产生二值序列的均匀性,对比在不同序列长度下,2 种方法产生“0”和“1”的数目,实验数据如表1所示。
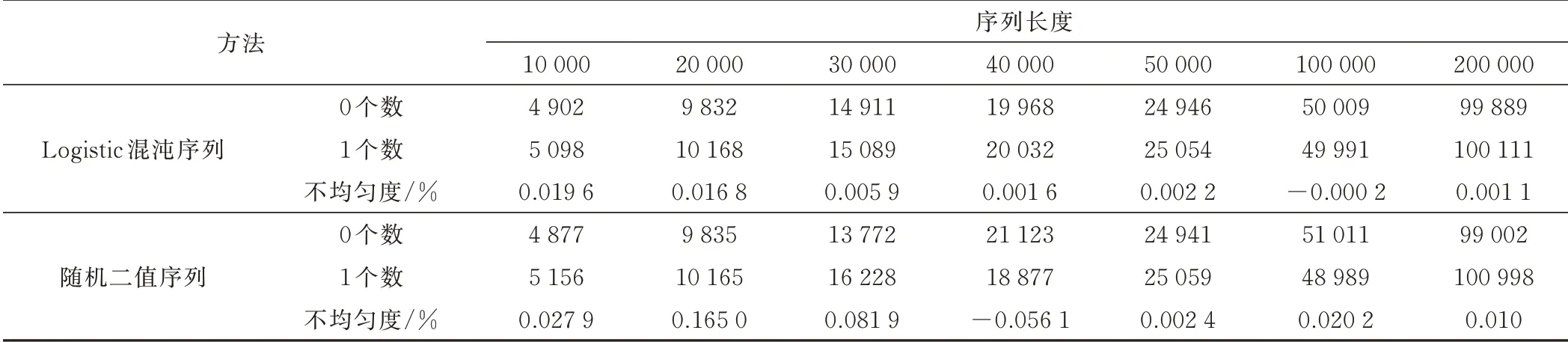
表1 2 种序列产生方法均匀性对比
实验结果表明,Logistic 混沌映射初始化方式比随机初始化方式产生初始种群的均匀性更好。基于Logistic 混沌映射丰富了算法初始种群的多样性和均匀性,初始种群的平均适应度更高,一定程度上能够避免算法陷入局部最优,提高迭代效率。
2.3.2 异步变化的学习因子
粒子群算法在进行速度更新时,通过学习因子使粒子具备自学习和社会学习的能力。固定的自学习因子和社会学习因子容易使迭代过程缓慢,易陷入局部最优[19]。为改善算法在迭代的不同阶段,动态调整自学习和社会学习的偏重,这里重新设计学习因子的变化公式,在算法迭代初期,使粒子具有较强的自学习能力,以增强算法开发性能和全局寻优能力;在算法迭代后期,增强粒子的社会学习能力,提高算法开采性能。学习因子变化公式为:

式 中,ci1和ci2分 别 表 示c1和c2的初 始 值,cf1和cf2表 示c1和c2的 终值。
2.3.3 速度向量化更新
采用式(11)对粒子位置进行更新时,随着速度不断累加,粒子对自身和种群的历史信息的利用率降低。粒子速度应根据当前粒子位置的取值情况进行更新,粒子在任一维度的取值为0 或1。这里定义2 个速度向量和和分别表示粒子i 位置取值 为0 和1 的 分 量,记 作=(),=()。迭代过程中对2 个速度向量采用式(15)的公式进行更新:

采用向量的形式根据不同维度位置参数的取值,对速度参数进行更新。然后依据式(10)调整粒子位置,避免了由于较大的粒子速度,导致的解趋同现象,充分利用粒子的个体极值和全局最优值,丰富粒子多样性,促进粒子向全局最优状态收敛。
3 基于改进粒子群算法的模型求解
3.1 编码设计
在针对组网雷达进行协同干扰时,采用IBPSO 算法解决干扰资源的优化分配,式(6)作为待优化目标函数和适应度评价函数,需要解决以下2 个问题。
1)粒子群初始化
一般粒子群个体数量在[20,100]范围内,这里种群数量默认选择NP=20。干扰机协同分配属于二值离散问题,设初始粒子群为X ={X1,X2,…,XNP},其中Xi(1≤i ≤NP)为粒子群中个体,代表一个可行解。
2)粒子个体编码
对组网雷达进行协同干扰,合理分配干扰机对不同雷达进行干扰,最大化雷达组网的干扰效益。当前干扰机数量为m,待干扰雷达数量为n,此时,干扰机分配矩阵Xi为m×n 的矩阵,可以表示为:
式中,xij(1≤i ≤m ,1≤j ≤n)取值为1 或0。若xij=1,则表示分配干扰机i 对雷达j 进行干扰;反之,不进行干扰。
3.2 算法流程
基于IBPSO 算法的组网雷达干扰资源分配流程描述如下:
1)初始化IBPSO 算法基本参数包括粒子群规模SN,最大迭代次数T,惯性权重ω,自主学习因子初始值ci1和终值cf1,社会学习因子初始值ci2和终值cf2。
2)根据2.3.1 的Logistic 初始化方法对粒子群进行初始化,提高初始种群的多样性和平均适应度。
3)计算并选择各粒子个体不同维度上的历史最优值pbest 和粒子群的全局最优值gbest,保存初始粒子群中最大适应度函数值,并记录粒子位置取值和干扰分配方案。
4)根据式(15)更新粒子速度,并依据式(14)对自学习因子和社会学习因子进行迭代更新,调整当前粒子学习偏重。
5)根据式(10)―(11)更新每个粒子各维度的位置取值xij,形成干扰分配矩阵Xi。
6)更新pbest 和gbest,计算更新后分配矩阵的各粒子适应度,若当前适应度大于个体最优适应度,则更新pbest;否则,不更新pbest。同理,若当前粒子群中粒子最大适应度大于全局最优适应度,则对gbest 进行更新;反之,不更新。
7)更新迭代次数t=t+1,当t ≥T,输出最优分配矩阵和干扰效益值,否则,返回3)。
4 仿真结果与分析
干扰资源协同分配是针对组网雷达进行有效干扰的关键技术,针对不同雷达的威胁程度合理分配当前干扰机,使得干扰效益值最大。这里将IBPSO 算法应用于协同干扰资源分配问题,并与文献[18]中BPSO算法和文献[6]中遗传算法(genetic algorithm,GA)进行比较。
4.1 仿真环境与算法主要参数设置
本文算法参数描述如表2 所示,算法各参数为:T为算法最大迭代次数,ci1、cf1分别为自学习因子的初值和终值,ci2、cf2分别为社会学习因子的初值和终值,ω为惯性权值,m 为当前可分配干扰机数目,n 为待干扰雷达数目。

表2 算法参数设置
为保证算法公平性,IBPSO 算法、BPSO 算法和GA 算法在每次实验中,干扰机和组网雷达的各项工作参数和工作状态不发生改变,保证具有相同的干扰效益值和威胁系数。
4.2 仿真实验与分析
4.2.1 迭代次数分析
迭代次数是衡量收敛速度的一个重要标准,算法优化至最优解时所需要的迭代次数越少,表现的收敛速度就越好。IBPSO 算法、BPSO 算法和GA 算法分别运行30 次,以迭代次数为横轴,干扰效益的平均值为纵轴,得到3 种算法的收敛曲线如图1 所示。
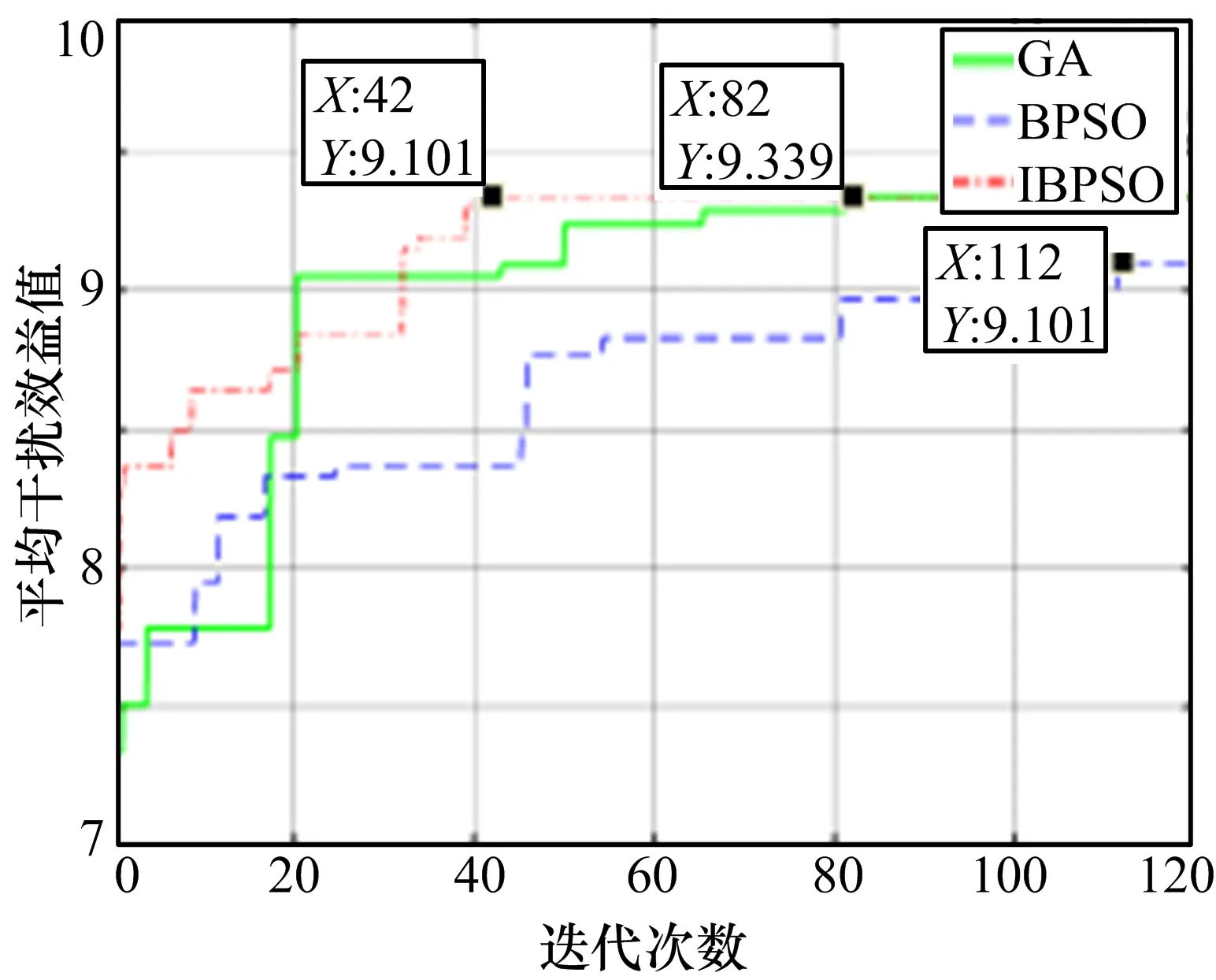
图1 迭代次数对比
由图1 可以看出,IBPSO 算法通过Logistic 混沌映射的方式初始化种群,使得初代种群的平均适应度要高于BPSO 和GA。在总体迭代次数上,IBPSO 算法迭代42 次后收敛至全局最优解,GA 在迭代82 次后收敛至全局最优,而传统的BPSO 算法迭代112 次后陷入局部最优。由此可见,IBPSO 算法通过动态改变自学习因子和社会学习因子的值,调整2 个学习方向的偏重程度;根据各粒子在不同维度的位置取值情况,分别对2 个速度向量进行更新,一定程度上避免了算法陷入局部最优。
4.2.2 多次试验性能比较
为对比IBPSO、BPSO 和GA 三种算法在处理离散优化问题的性能,分别设置20 组不同的m、n、E、W组合参数,3 种算法分别运行40 次,获取不同参数组合下3 种算法的平均干扰效益和所需迭代次数,由图2―3 可以看出,在不同组合参数下,IBPSO 算法相较与BPSO、GA,获得的平均干扰效益最大且需要的迭代次数最少。

图2 3 种算法平均干扰效益

图3 3 种算法平均迭代次数
4.2.3 算法统计性能比较
设单次寻优值与全局最优值的差值在0.01 以内则视为达到全局最优。在不同运算规模下分别将三种算法运行100 次,表3 统计了各算法在不同运算规模下的寻优概率,由表3 可以看出,随着m、n 增大,三种算法的寻优概率均有所降低,易陷入局部最优解,其中IBPSO 算法在同一运算规模下,其寻优概率均高于BPSO 和GA。
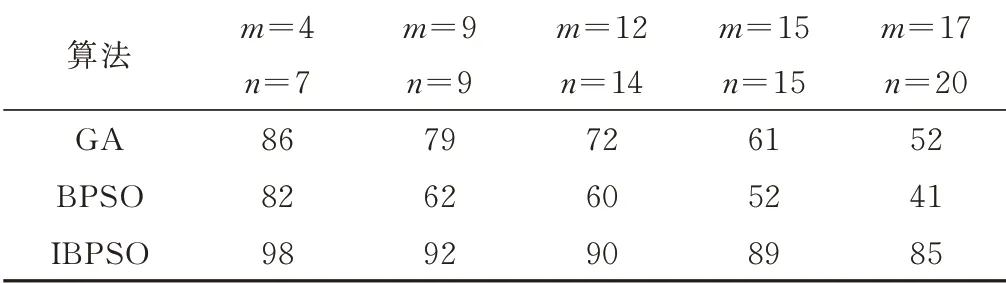
表3 三种算法获得最优决策概率 %
为更详细地对比三种算法的收敛稳定性,在同一组m、n 的取值条件下,这里取m=9、n=9,分别将三种算法运行100 次并求得全局最优值与每次运算收敛值的差值,所得收敛误差如图4 所示。
由图4 可以看出,运行100 次,IBPSO 算法达到最优解次数和最差收敛误差分别为92 次和0.016,BPSO算法达到最优解次数和最差收敛误差分别为62 次和0.03,GA 达到最优解次数和最差收敛误差分别为79次和0.029。IBPSO 算法的寻优概率和收敛性能均要优于BPSO 和GA,具有较好的统计性能。
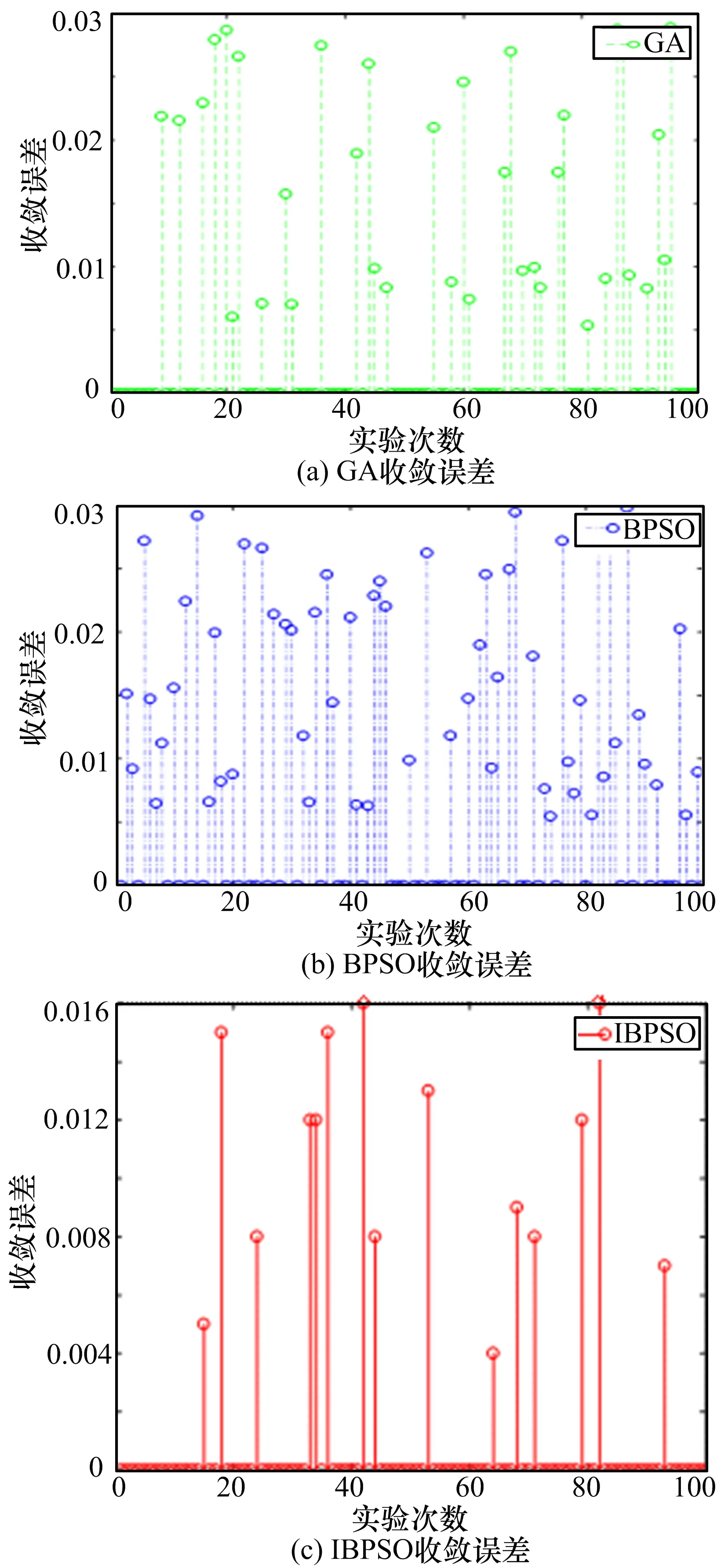
图4 收敛误差对比
5 结束语
本文提出一种IBPSO 算法,是PSO 算法针对离散优化问题的延伸,主要从以下3 方面的措施保证了IBPSO 算法的优化性能:1)采用Logistic 混沌序列初始化,提高初始种群多样性和均匀性,在一定程度上避免了算法陷入局部最优,提高了迭代效率;2)采用异步变化的学习因子,在算法不同阶段有偏重地发展算法自学习和社会学习能力,提高了算法全局搜索能力;3)将速度向量化,并采用不同更新方式,一定程度上优化了算法寻优概率,减小了收敛误差。利用组网雷达干扰机协同分配问题进行仿真验证,结果表明,IBPSO 算法在减少迭代次数,提高收敛速度的同时,能够保证较高的寻优概率,减小收敛误差,取得了明显优于BPSO 算法和GA 算法的优化性能。■
猜你喜欢
计算机仿真(2022年8期)2022-09-28
计算机测量与控制(2022年3期)2022-03-30
商用汽车(2021年4期)2021-10-13
作文周刊·小学一年级版(2021年36期)2021-01-14
阅读与作文(小学高年级版)(2020年8期)2020-09-12
航天电子对抗(2020年6期)2020-02-04
当代旅游(2016年10期)2017-04-17
现代兵器(2016年6期)2016-06-25
财经理论与实践(2015年2期)2015-04-16
