
敏捷SAR卫星星上实时任务规划设计
2020-10-16 10:57张磊谢松姚芳谢斌
航天器工程 2020年5期
张磊 谢松 姚芳 谢斌
(航天东方红卫星有限公司,北京 100094)
随着星间组网技术的发展及星上智能化水平的提高,多颗卫星能够通过星间网络互联进行在轨自主协同,从而弥补单星能力不足,提高信息获取的时效性、多源性和准确性。对于多星协同的实时引导成像,根据应用场景和任务需求,不同有效载荷类型的卫星和不同轨道高度的卫星可基于星间网络互联建立引导关系,协同完成任务。引导卫星根据有效载荷实时探测结果生成目标引导信息,并通过星间网络将其发送给成像卫星。成像卫星接收到目标引导信息后,根据本星状态、能力、资源约束等自主完成对目标成像的规划调度。地面管控中心负责协同任务的组织筹划,但受测控、数传等资源限制,通常难以作为信息节点实时参与到引导任务过程中。在实时引导成像任务中,由于目标出现的时空随机性大、过顶成像窗口临近等特点,客观上要求成像卫星具有星上实时任务规划能力,以满足对动态任务实时响应的需求。
星上自主任务规划通常包含感知、决策、执行等环节,具有动态感知、快速响应、自主执行等特点,能够在星载综合电子系统支持下,针对用户任务需求或在轨事件,根据平台、有效载荷的运行状态及使用约束,由卫星自主编排任务计划、制定动作序列和生成控制指令。星上自主任务规划技术对于提高敏捷卫星使用效能、实现多星在轨自主协同具有重要意义。目前,星上自主任务规划技术在国内外卫星上已有应用,如美国的地球观测-1(EO-1)卫星[1]、法国的“昴宿星”(Pleiades)卫星[2]、我国的高分三号卫星[3]等,它们在任务类型、规划过程、自主化程度等方面均具有各自的特点。针对敏捷卫星自主任务规划,国内外已开展了若干研究。文献[2]中构建了“昴宿星”卫星任务规划问题模型,对贪婪算法、动态规划、约束规划、局部搜索4种方法的求解情况进行了比较。文献[4]中针对天气等外部环境对成像任务的影响提出一种结合随机贪婪算法的反应/慎思型自主任务规划结构,以提高任务成功率。文献[5]中针对敏捷光学卫星设计了自主任务管理系统,将单轨执行任务数提高至20个。文献[6-7]中基于规划-决策模式提出一种结合执行和信息反馈的自主任务规划框架,以提高任务完成率,并针对24 h的观测回传任务进行了仿真。通过对相关文献及工程技术现状的调研发现,不考虑有效载荷工作模式的区别,已有研究通常面向单星长期静态任务及低动态事件处理(如应急任务、天气影响或卫星状态变化),甚少涉及高动态的实时引导成像任务,对相关自主任务规划方法研究较少。但是,两种任务场景区别较大,后者的特点是任务持续时间较短,任务过程目标不断随机动态出现,观测冲突在全局上普遍存在但不可预知且局部可能较剧烈、引导观测时间链短,因此,已有研究仍显不足,需要进一步开展以在轨协同为应用背景的敏捷卫星实时任务规划研究。
敏捷SAR卫星将SAR载荷固定安装在卫星平台上,通过平台姿态机动实现波束指向,具有较强的三轴姿态机动能力及多种成像模式[8-10]。为满足实时引导成像任务对卫星自主协同、实时响应的要求,本文设计了敏捷SAR卫星星上实时任务规划的运行框架、策略、过程及方法,并通过模拟实时引导成像工作过程的仿真算例对其正确性和有效性进行了验证。
1 实时任务规划设计
敏捷SAR卫星星上实时任务规划设计包括运行框架、策略、过程及方法4个方面。首先,从实时引导成像任务过程及特点出发,基于规划-决策模式构建滚动规划结合动态重规划的星上实时任务规划运行框架,并制定长规划窗口与短决策窗口滚动推进的规划-决策策略。然后,根据运行框架及策略设计以事件触发或固定周期推进的星上实时任务规划运行过程。最后,对运行过程中的多点目标成像规划问题,考虑到问题的求解规模较小,采用深度优先的树搜索技术搜索最优成像目标序列,并利用冲突消解与收益预测规则对搜索树进行剪枝,以加快搜索速度。
1.1 运行框架
敏捷SAR卫星星上实时任务规划运行框架包含滚动规划模块、动态重规划模块及执行决策模块,如图1所示。滚动规划模块实现规划窗口的滚动推进、待规划任务队列的确定、是否触发重规划的判断和可观测任务队列的生成等功能。动态重规划模块根据重规划策略对可观测任务队列进行调整,包括插入、删除和完全重规划等操作。执行决策模块通过查询可观测任务队列确定临近执行的观测任务,根据任务参数按指令模板生成程控指令序列并发送。运行框架该设计主要考虑任务的两个特点。
(1)实时引导过程连续且目标成像窗口临近成像卫星。任务过程中,引导卫星按照固定的时间周期或采用事件触发方式逐次向成像卫星发送目标引导信息。实时引导的目标,特别是移动目标,对成像时效性的要求较高,成像卫星收到引导目标时一般距其成像窗口仅几分钟甚至更短。在这种情况下,成像卫星必须采用流水式的滚动规划方式。
(2)在逐次引导和滚动规划过程中,成像卫星后续接收到的引导目标的成像窗口可能在之前已规划可成像的目标之前,即目标的被规划次序与成像窗口顺序倒置。对于具有优先级属性的目标,这种时序上的倒置可能造成后到达的高优先级目标因为未参与前序规划而无法被安排成像。因此,成像卫星必须能够对前序规划结果进行调整,即动态重规划。
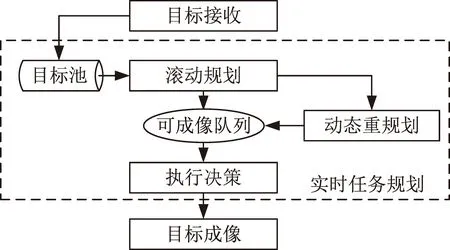
图1 实时任务规划基本运行框架Fig.1 Basic operational framework of real-time mission scheduling
1.2 运行策略
敏捷SAR卫星星上实时任务规划采用长规划窗口与短决策窗口滚动推进的规划-决策策略,如图2所示。首先,每次滚动规划对于整个任务过程而言都是一次局部规划,待规划任务队列仅是全局任务队列的子集且后序规划往往受前序规划结果影响,因此,多次滚动规划难以在全局层面获得最优成像序列,而采用长规划窗口以扩大局部规划的任务集,有助于获得较优的全局成像序列。其次,采用短决策窗口仅对已规划可成像队列中第1条程控指令时刻位于决策窗口内的目标进行指令输出,使得星上任务规划在后序规划中能够根据新接收目标情况对队列中未输出指令的目标进行动态调整,这样既保证及时观测,又满足任务对动态重规划的需求。
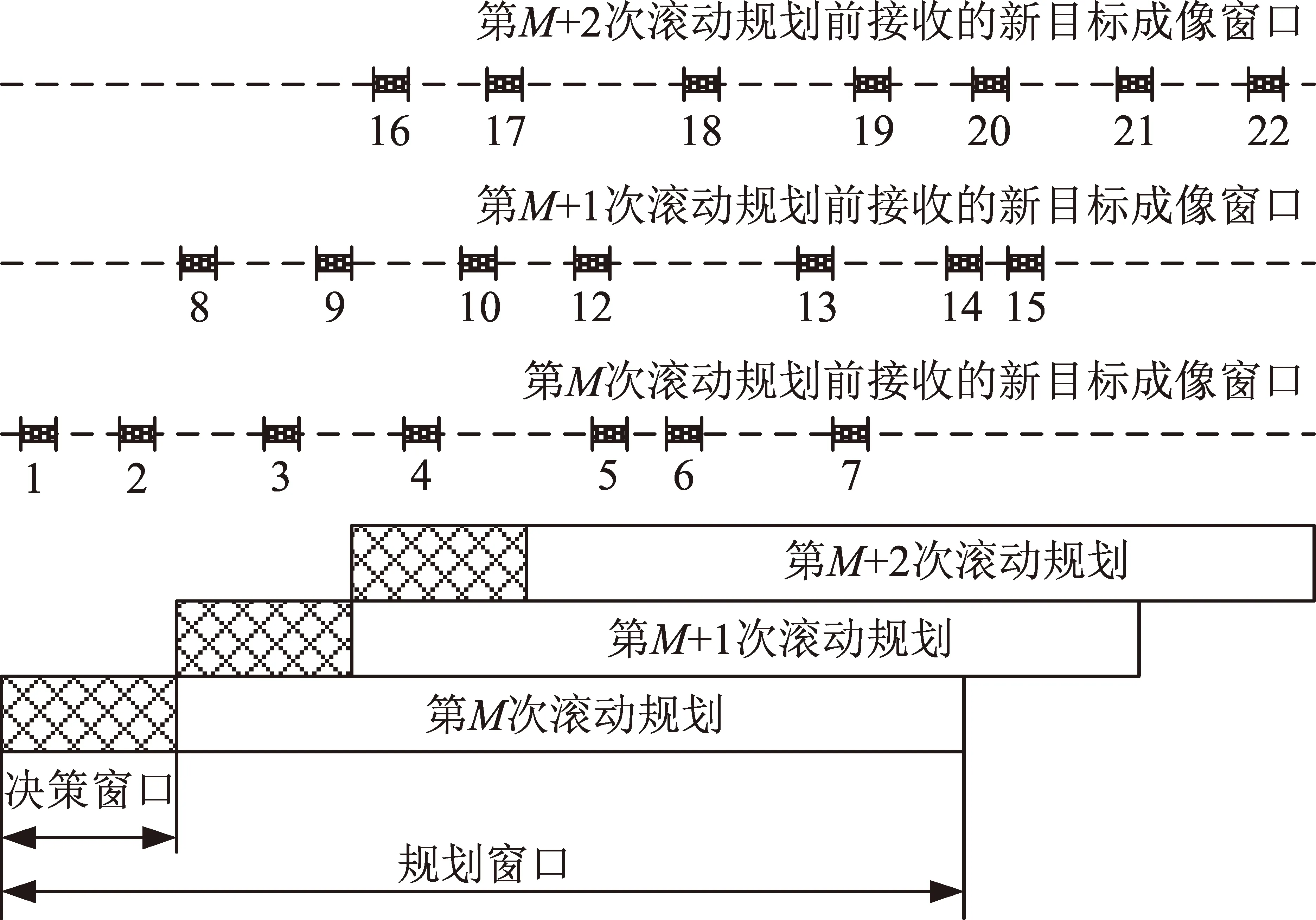
图2 实时任务规划的规划与决策窗口Fig.2 Scheduling and decision windows of real-time mission scheduling
1.3 运行过程
敏捷SAR卫星星上实时任务规划运行过程,如图3所示。
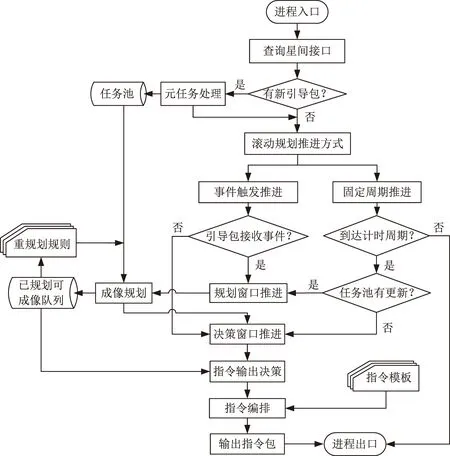
图3 实时任务规划运行过程Fig.3 Procedure of real-time mission scheduling
对于采用固定周期推进的滚动规划过程,可采用规划窗口与决策窗口同步推进的策略,决策窗口与滚动周期一致。对于采用事件触发推进的滚动规划过程,可采用规划窗口与决策窗口异步推进的策略,在滚动规划触发前决策窗口按固定周期推进。重规划规则包括仅插入、删除-插入、完全重规划等。实时任务规划作为星上应用软件,其进程由星上实时操作系统管理和调用,按固定周期及预先分配的时间片被调度执行。
1.4 多点目标成像规划方法
敏捷SAR卫星平台具有三轴快速姿态机动能力,与有效载荷配合可实现对点目标的正侧视条带成像、斜视条带成像、滑动聚束成像,以及对区域目标的多条带拼接成像。在实时引导成像任务中,引导目标通常为任务区域内的若干点目标,受限于目标成像窗口、平台有效载荷使用约束、星上资源等条件,对这些点目标的成像可能存在冲突,因此,需要通过成像规划确定合理的成像目标序列,充分发挥平台敏捷机动能力,获得较好的成像收益。
1.4.1 点目标属性及成像元任务
点目标T的属性为
T:〈SID,φLat,λLon,MImg,TImg,RPrio〉
(1)
式中:SID为目标编号;φLat和λLon分别为目标位置的纬度和经度;MImg和TImg分别为目标成像模式和成像时长;RPrio为目标优先级。
点目标的属性参数不能直接用于成像规划,必须将其转化为成像元任务属性参数。
1)正侧视条带成像元任务
SAR载荷正侧视条带成像采用被动推扫方式,成像过程中卫星保持侧摆姿态(滚动),并按全零多普勒导引律进行姿态导引,成像中心时刻为卫星相对目标的零多普勒时刻。其元任务ESd属性为
ESd:〈SID,TSt,TFn,ARoll,SBeam,FProf〉
(2)
式中:TSt和TFn分别为成像起始时刻和结束时刻;ARoll为姿态滚动角;SBeam为波束编号;FProf为成像收益,见式(3)。
FProf=kRPrio
(3)
式中:k为大于1的整数。
2)斜视条带成像元任务
SAR载荷斜视条带成像同样采用被动推扫方式,成像过程中卫星保持侧摆姿态(滚动、俯仰),成像中心不是卫星相对目标的零多普勒时刻。考虑图像质量,斜视条带成像受斜视角约束。根据斜视角约束,可以计算卫星对目标的成像窗口。其元任务ESq属性为
ESq:〈SID,TMin,TMax,SBeam,TImg,FProf〉
(4)
式中:TMin和TMax分别为成像窗口的前沿时刻和后沿时刻。
3)滑动聚束成像元任务
SAR载荷滑动聚束成像通过卫星平台姿态机动对负高程虚拟点凝视使波束扫过目标点,成像中心时刻为卫星相对目标的零多普勒时刻。其元任务ESs属性为
ESs:〈SID,TStc,{ASt},TFnc,{AFn},
φVp,λVp,HVp,SBeam,FProf〉
(5)
式中:TStc和TFnc分别为滑动聚束成像的起始时刻和结束时刻;{ASt}和{AFn}分别为滑动聚束成像的起始姿态和结束姿态;φVp,λVp,HVp分别为虚拟点纬度、经度、高程。
1.4.2 成像规划约束条件
在多点目标成像规划中需要考虑下列约束条件。
(1)相邻2次成像的姿态转换时间满足平台姿态机动能力,如式(6)所示。
(6)

(2)相邻2次成像间的姿态机动角度小于最大允许姿态机动角度。
(3)多点目标连续成像载荷累积成像工作时长小于最大允许工作时长。
(4)多点目标连续成像姿态机动累计次数小于最大允许姿态机动次数。
1.4.3 成像目标序列择优规则
对于多点目标成像,存在若干可行的成像目标序列,因此,在成像规划中需要从这些可行序列中进行择优。择优规则可以设置多个判据,并根据任务需求安排这些判据的取舍及执行顺序。
在带有优先级属性的多点目标成像任务规划中,记可行的成像目标序列为QListFea,序列由若干无成像冲突并按成像先后顺序排列的目标元任务构成,如式(7)所示。
QListFea={Ei}
(7)
式中:Ei为序列QListFea中的第i个目标。
首要判据为序列总收益最大,如式(8)所示。
(8)
式中:FProf(Ei)为序列QListFea中目标Ei的收益。
次要判据为高优先级目标数量最多,如式(9)所示。
(9)

1.4.4 成像目标序列规划算法
当前用于对地成像卫星任务规划的算法[11]大致可分为确定性算法、启发式算法和搜索算法3类,这些算法在不同的应用场景下各有优劣。对于星上自主任务规划而言,应着重考虑算法运行的硬件环境、一次规划数据输入量和一次规划运行时间约束等条件,要求规划算法具有效率高、开销小和稳定收敛的特点,能够满足星上实时性、可靠性要求。实时引导成像一次任务约有几十个点目标,成像规划问题的求解规模较小,因此,本文采用深度优先的树搜索技术[12-13]搜索最优成像目标序列,在搜索过程中利用冲突消解规则、收益预测规则对搜索树剪枝,以缩小搜索空间、加快搜索速度。其大致步骤为:①根据卫星当前状态构造虚拟成像元任务,作为搜索树的根节点;②对待规划成像元任务按零多普勒时刻进行排序,用于构造搜索树各层的子节点;③采用深度优先搜索算法遍历搜索树,利用冲突消解规则、收益预测规则裁剪搜索树;④按择优规则比较新获取成像目标序列与已获取最优成像目标序列,更新最优序列;⑤搜索完成,确定最优成像目标序列。
考虑到星上存储资源有限,难以存储完整的搜索树,因此仅保存元任务队列,在搜索过程中动态生成子节点。冲突消解规则是成像规划约束条件的约束满足规则,对于不满足约束的元任务,剪除以该元任务为根节点的左子树。收益预测规是指若当前所搜索序列的成像收益不可能大于当前最优成像目标序列的收益,剪除以当前节点为根节点的右子树,收益预测规则的判据如式(10)所示。
(10)
每次通过冲突消解剪枝后或搜索到叶子节点,即获取一个可行的成像目标序列,此时需要根据择优规则更新最优成像目标序列。
2 仿真验证
2.1 仿真设定
如图4所示,SAR波束固定安装方向沿卫星本体坐标系OXYZ的+Z轴。星上实时任务规划采用固定时间周期推进的滚动规划方式,每100 s推进1次。点目标分布情况如图5所示,目标图示M-SID-RPrio表示第M个滚动周期内接收的新目标的编号SID及其优先级RPrio。优先级设置为1~5级,重要程度逐级升高,计算收益时k取4。单个目标成像时间6 s。基于该场景分别对正侧视条带成像模式、斜视条带成像模式下的敏捷SAR卫星星上实时任务规划过程进行仿真。对于滑动聚束模式,尽管其在成像模式上与正侧视条带模式不同,但从成像规划的角度看,其成像时刻在元任务中是确定的,因此二者在多点目标成像规划的处理上是相同的。
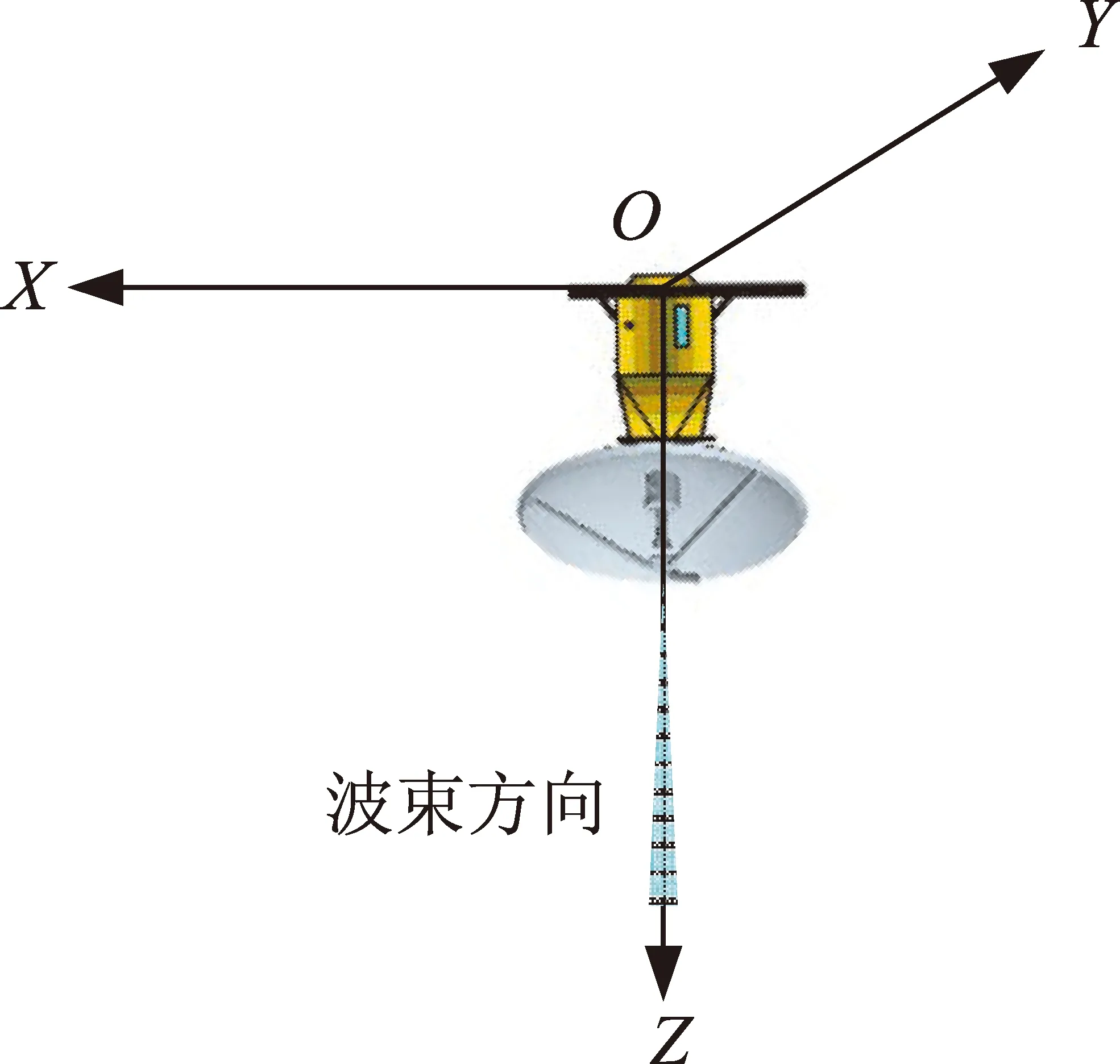
图4 SAR波束安装方向示意Fig.4 SAR beam installation direction diagram
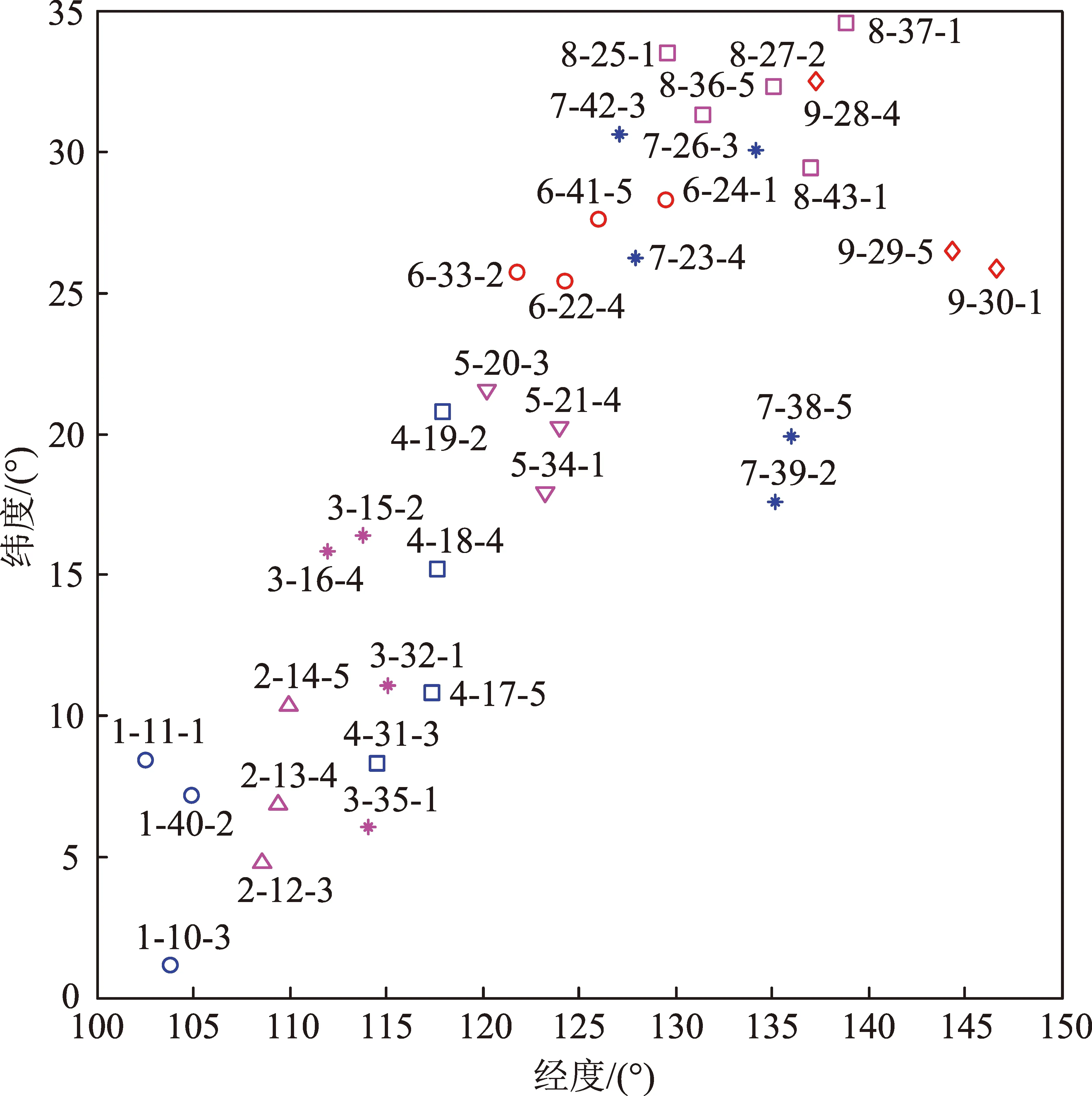
图5 点目标分布情况Fig.5 Spatial distribution of target points
2.2 多点目标正侧视条带成像
针对仿真场景的多点目标正侧视条带成像,滚动规划仿真结果如图6所示。图中:规划可观测目标以红色圆形表示;黑色倒三角处为其正侧视条带成像起始时刻,连接各目标的虚线表示成像路径;因冲突消解舍弃的目标以蓝色方形图标表示;各目标编号标示在图标上方。整个滚动规划过程累计规划目标34个,规划可成像并输出目标21个,成像总收益6828,未成像的高优先级目标(优先级不小于4)3个(5级1个、4级2个)。
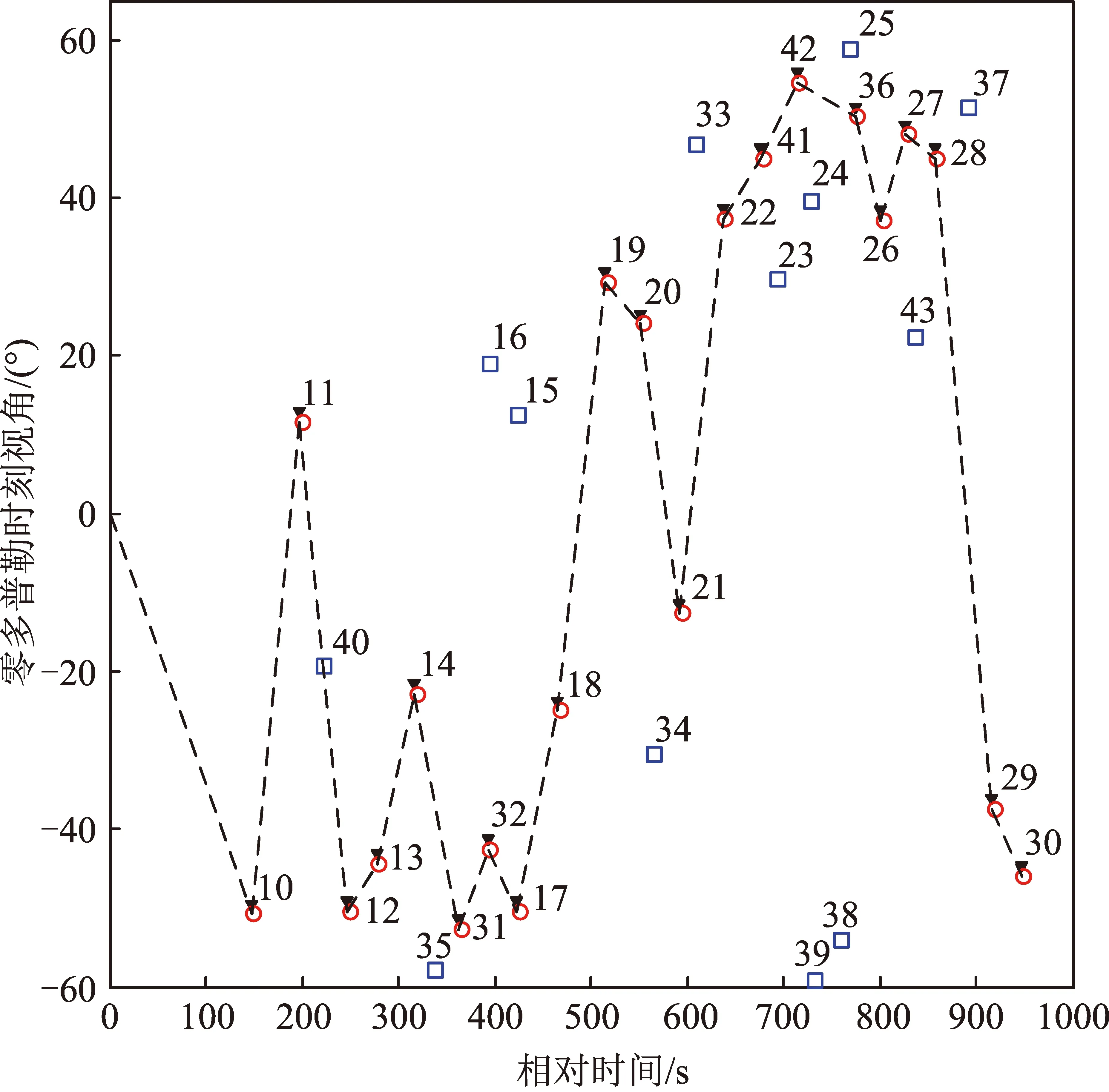
图6 多点目标正侧视条带成像滚动规划结果Fig.6 Rolling scheduling results of multi-target points imaging under side-looking strip mode
如图7所示,星上实时任务规划按规划-决策策略共进行了10次滚动规划,其中,第10次由于未收到新目标而未进行成像规划,仅进行了指令输出决策。1次滚动规划最多规划11个目标,最多输出3个目标。
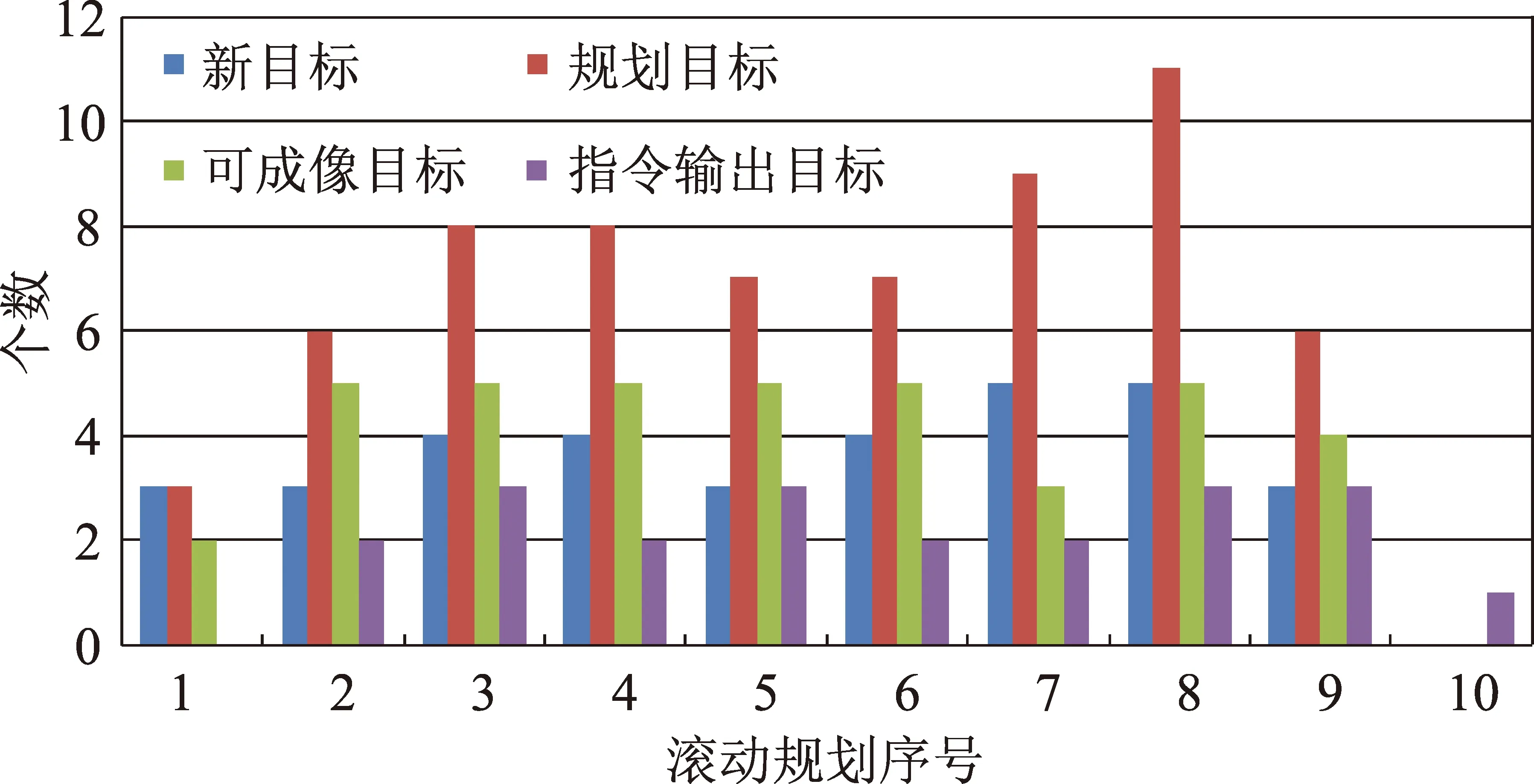
图7 多点目标正侧视条带成像滚动规划过程数据Fig.7 Rolling scheduling process data of multi-target points imaging under side-looking strip mode
采用全局规划方式对所有目标点进行统一规划,结果如图8所示。不难发现,该仿真场景下滚动规划与全局规划的成像路径一致。这表明星上实时任务规划过程所采用的规划-决策策略是有效的。
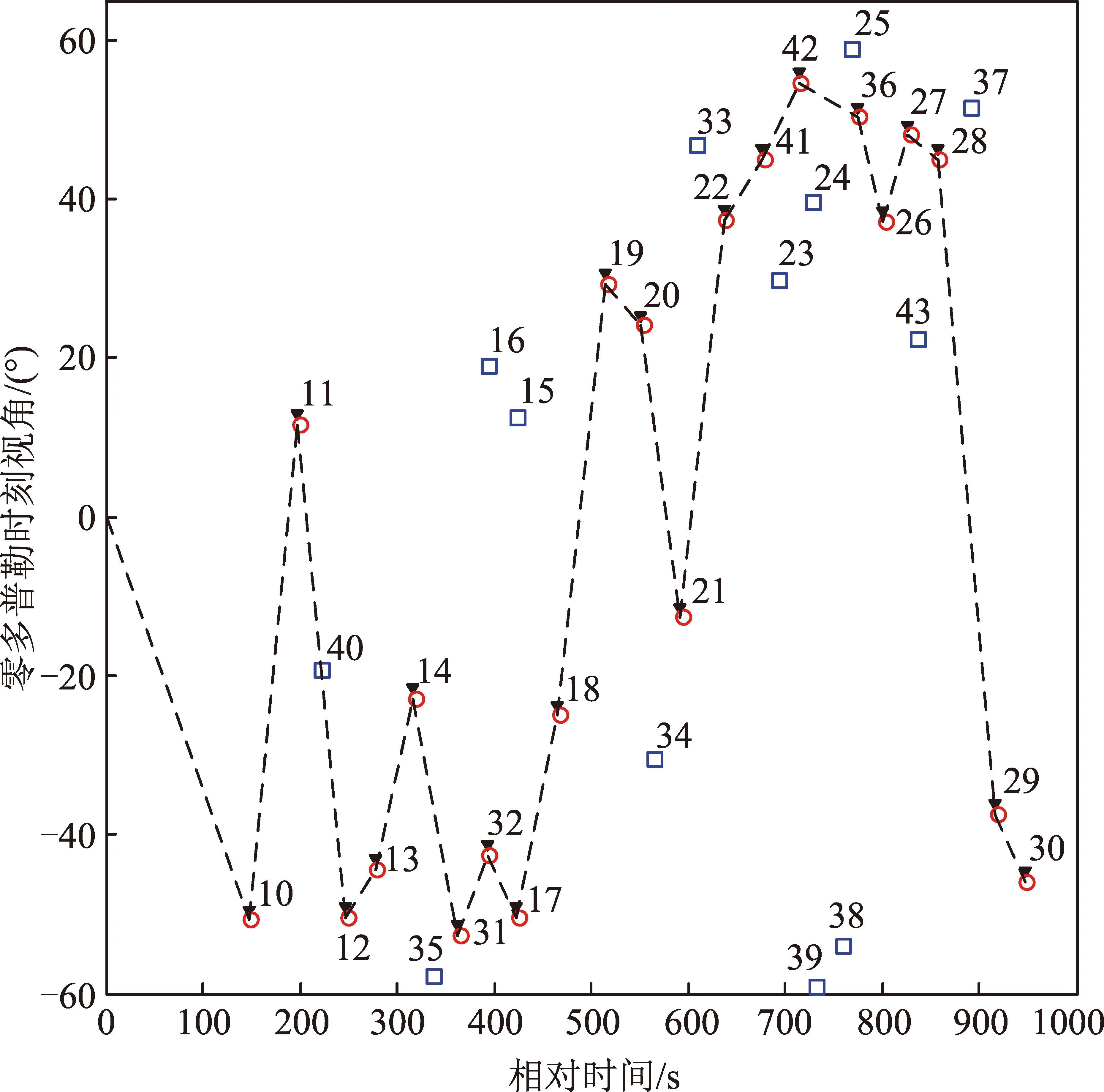
图8 多点目标正侧视条带成像全局规划结果Fig.8 Global scheduling results of multi-target points imaging under side-looking strip mode
2.3 多点目标斜视条带成像
与正侧视条带成像、滑动聚束成像不同,斜视条带成像的成像时刻不确定。在斜视角约束下,可以确定卫星对目标成像的时间窗口,在该窗口内的任意时刻卫星对目标成像均满足使用要求。从提高多目标成像效能考虑,本文按“尽早成像”原则在成像窗口内确定成像时刻,即在成像时间窗口内选择约束满足的最早可成像时刻作为目标成像时刻。
针对仿真场景的多点目标斜视条带成像滚动规划,仿真结果如图9所示。图中:规划可观测目标的成像窗口以红绿色条表示,红色部分表示前斜视窗口,绿色部分表示后斜视窗口,交界处为零多普勒时刻;黑色倒三角处为其斜视条带成像起始时刻;连接各目标的虚线表示成像路径;因冲突消解舍弃的目标以蓝粉色条表示;各目标编号标示在色条上方。整个滚动规划过程累计规划目标34个,规划可成像并输出目标29个,成像总收益7400,未成像的高优先级目标(优先级不小于4)1个(5级)。
如图10所示,星上实时任务规划按规划-决策策略共进行了10次滚动规划,其中,第10次由于未收到新目标而未进行成像规划,仅进行了指令输出决策。1次滚动规划最多规划9个目标,最多输出4个目标。
采用全局规划方式对所有目标点进行统一规划,结果如图11所示。由图11可见:规划可成像并输出目标27个,成像总收益8364,未成像目标6个优先级1、1个优先级3。对比后发现,该仿真场景下滚动规划与全局规划基于“尽早成像”原则确定的成像时刻存在差异,这是由滚动规划的局部性造成的,使编号38目标(优先级5)在后序动态重规划中因与编号36目标(优先级5)冲突且路径收益小而被放弃。这表明星上实时任务规划过程能够通过动态重规划调整前序规划结果,从而获得收益更好的成像路径。
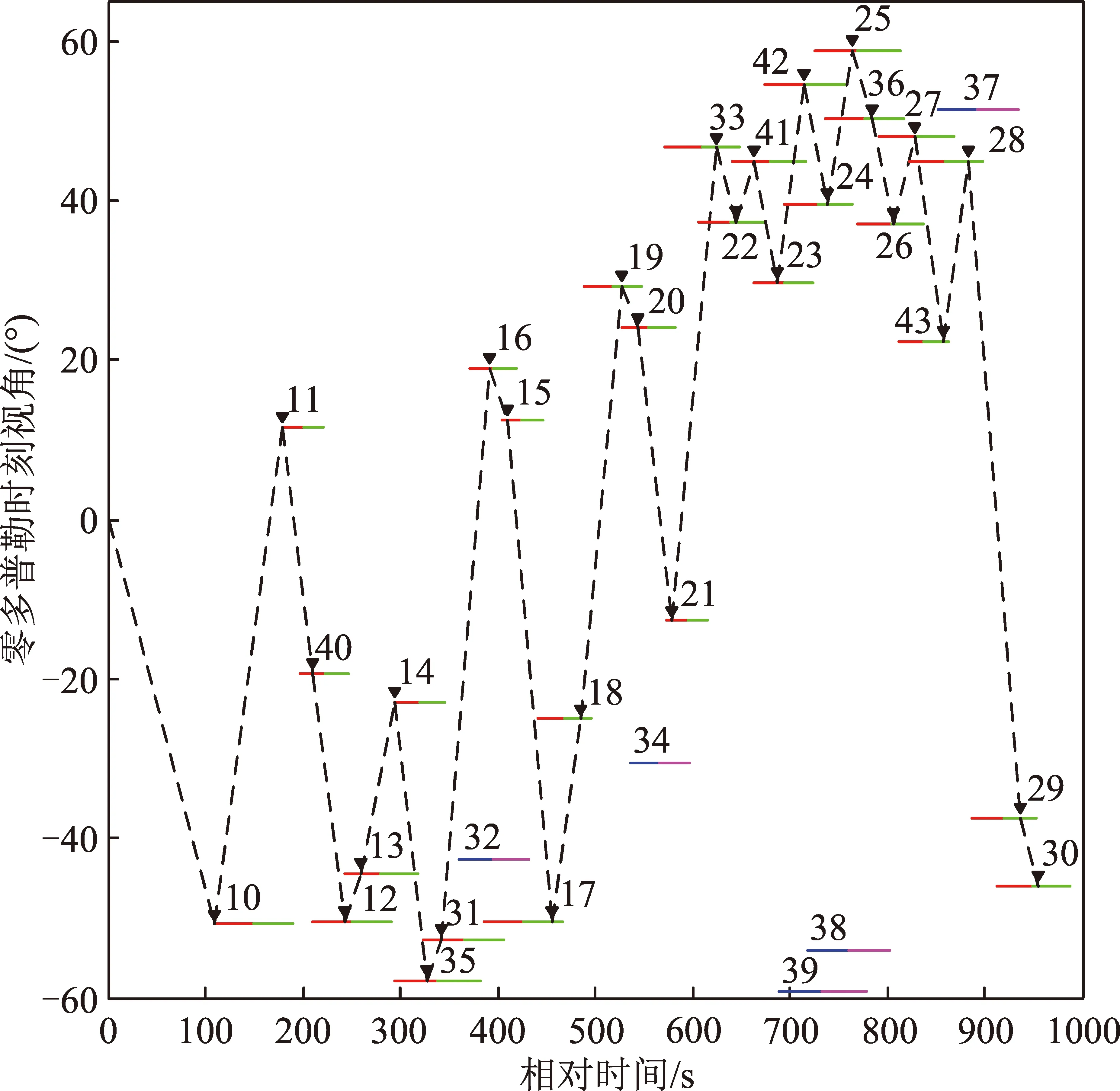
图9 多点目标斜视条带成像滚动规划结果Fig.9 Rolling scheduling results of multi-target points imaging under squint strip mode
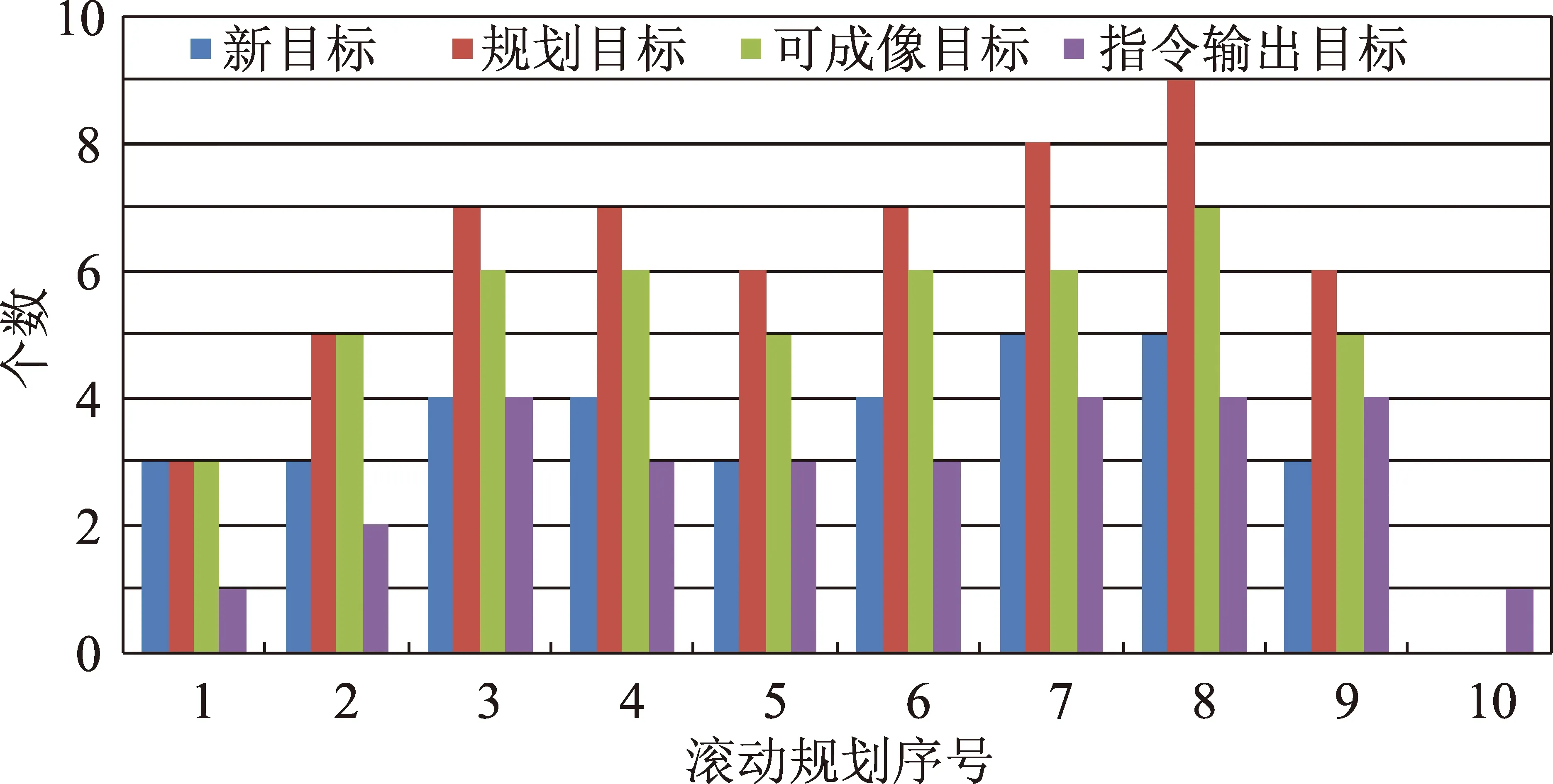
图10 多点目标斜视条带成像滚动规划过程数据Fig.10 Rolling scheduling process data of multi-target points imaging under squint strip mode
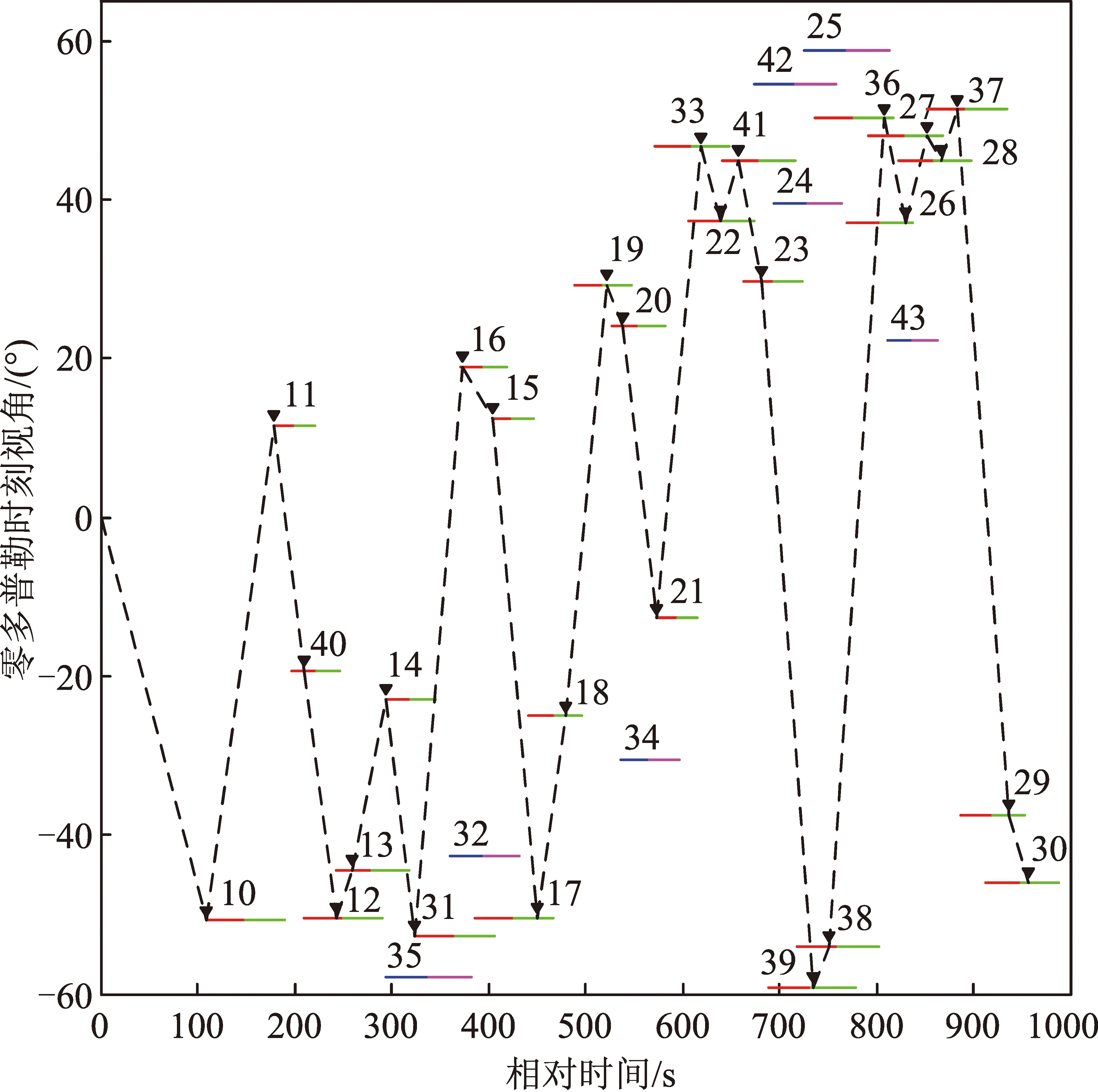
图11 多点目标斜视条带成像全局规划结果Fig.11 Global scheduling results of multi-target points imaging under squint strip mode
3 结束语
针对敏捷SAR卫星在轨实时引导成像任务需求,制定滚动规划结合动态重规划的运行框架,以及长规划窗口与短决策窗口滚动推进的规划-决策策略,设计以事件触发或固定周期推进的星上实时任务规划过程。对于敏捷SAR卫星的多点目标成像规划问题,采用深度优先的树搜索技术搜索最优成像目标序列,设计相应的冲突消解规则、收益预测规则,以便在搜索过程中通过剪枝缩小搜索空间、加快搜索速度。基于模拟的实时引导成像任务过程及引导目标数据,分别在正侧视条带成像模式、斜视条带成像模式下对星上实时任务规划进行仿真。结果表明:本文提出的星上实时任务规划框架、策略、过程及方法是有效的,在滚动推进的规划-决策过程中,能够根据新接收目标动态调整已规划结果,通过重规划获取新目标集的最佳收益观测序列并及时决策输出临近观测目标,滚动规划的观测序列能够达到与全局规划相同或接近的观测收益。基于该设计的星上实时任务规划已实现在轨应用并通过验收,有效满足了任务需求,可用于在轨协同引导成像任务。
猜你喜欢
计算机应用与软件(2022年6期)2022-07-12
自然灾害学报(2022年2期)2022-05-10
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
中国学校体育(2021年10期)2021-04-26
康颐(2020年14期)2020-11-10
中老年健康(2016年1期)2016-03-07
中华家教·幼儿版(2014年6期)2014-09-15
小学阅读指南·高年级版(2014年2期)2014-05-27
祝您健康(1987年4期)1987-12-29
