
对风廓线雷达和L 波段雷达探空观测的水平风场的一致性评估
2020-10-15 09:36王丽吉陈晔峰吴书成高祝宇杨程
浙江大学学报(理学版) 2020年5期
王丽吉,陈晔峰,吴书成,高祝宇,杨程
(1.浙江省气象信息网络中心,浙江 杭州310017; 2.浙江省气象科学研究所,浙江 杭州310008)
0 引 言
风廓线雷达(wind profiler radar, WPR)以晴空大气湍流对入射电磁波的散射回波为探测基础,采用多普勒雷达收发技术求解得到大气三维风场,在强对流天气过程的风场监测[1]和数值预报的同化应用方面发挥了重要作用[2]。从20 世纪80 年代开始,美国、日本相继布设了风廓线雷达业务探测网,我国也相继开展对风廓线雷达技术的论证和研制工作[3],2013 年,中国气象局出台了《风廓线雷达及应用业务发展规划(2013—2020 年)》。目前,已有多个省市(如浙江省、广东省、上海市等)实现区域组网。
相比于地面,获取探空风场信息的时空分布较困难,而风廓线雷达则可在无人值守时连续提供大气水平风场、垂直气流、大气折射率结构常数等气象要素的高度分布和时间演变,在垂直和时间分辨率以及实时性上具有显著优势。但由于风廓线雷达主要是利用大气湍流对电磁波的散射进行探测的,当湍流信号较弱时容易受各种非气象目标物的干扰,因此,其探测精度不及常规探测设备。
目前对风廓线雷达资料的评估主要有3 种途径:(1)利用五波束风廓线雷达获取2 组相互独立的水平风分量,评估水平风的空间不均匀分布对风廓线雷达观测的影响,通过自对比,评估数据的可信度[4-5];(2)以某区域内探空资料为基础,将其与美国国 家 环 境 预 报 中 心(National Centers for Environmental Prediction,NCEP)再分析资料进行对比分析,确认该区域内NCEP 再分析场的合理性,然后对风廓线雷达资料做出评估[6-8];(3)将探空资料与风廓线雷达观测资料直接进行对比,得到评估结果。由于探空观测具有秒采样和原位测量特征,被认为是最能客观反映大气的垂直结构,因此,若风廓线雷达架设点附近有探空站点,则途径(3)具有显著优势。
国内外不乏对风廓线雷达观测资料与探空资料进行对比分析的研究。国外相关工作开展较早,WEBER 等[9]利用2 年的风廓线雷达观测资料,将其与常规探空资料进行了对比分析。 此外,BALSLEY 等[10]、FARLEY 等[11]、FUKAO 等[12]和LARSEN[13]将风廓线雷达测风结果与气球探空测风进行了多次对比。在国内,李晨光等[1]将1998 年华南暴雨和南海季风科学实验期的风廓线雷达资料与探空资料进行了对比分析,得到两者一致性较好的结论。王欣等[14]比较了风廓线雷达资料与同步试验的VAISALA 探空仪资料,验证了风廓线雷达资料的可信度。董保举等[15]将高原地区的风廓线雷达资料与GPS 探空资料进行对比,发现低空数据的获取率在不同天气条件下差异不大,高空数据的获取率均为阴雨天较好、晴天较差。万蓉等[16]通过比较夏季的风廓线雷达资料和加密探空资料(两者均将风向、风速偏差不超出阈值视为有效观测),给出了不同降水条件下和不同高度时有效样本率的分布。吴蕾等[17]基于北京南郊3 a 的风廓线雷达资料,计算并分析了不同采样空间和不同时间的风廓线雷达风场与L 波段雷达探空风场,得到两者具有一致性的结论。
浙江省气象局自2010 年始先后从中国航天科工集团第二研究院第二十三研究所采购了CFL-03型边界层风廓线雷达7 台,其中位于萧山的风廓线雷达离杭州国家基准气候站最近,直线距离为11 km。本文选取2015 年1 月至2018 年12 月萧山风廓线雷达资料,与杭州站L 波段雷达探空资料进行对比分析,以对2 种观测设备水平风场的一致性进行评估。
1 资料来源和数据选取
1.1 资料来源
采用的测风资料分别来自萧山风廓线雷达(120.287°E,30.174°N)和杭州探空站(120.167°E,30.233°N),雷达型号为CFL-03,L 波段雷达数字探空仪型号为GTS1。探空站位于雷达架设点西北偏西方向,两站相距约11.4 km。
由于探测原理和方法的差异,风廓线雷达和L波段雷达探空观测的取样空间并不相同。风廓线雷达获取的是设备正上方数千米高度内的风廓线数据,一组风廓线数据的采样时间仅需几分钟。而L波段雷达探空气球则以约5 m·s-1的速度上升[18],有时会飘移至距观测点几十千米之外。鉴于此,选择东南方向,即气球向风廓线雷达架设点飘移的方向进行探空观测,尽量减小2 种仪器非同源同址以及气球飘移对分析结果的影响。图1 给出的是探测到的2018 年所有向东南方向飘移、高度在10 km 内的水平飘移轨迹,其余年份的飘移轨迹相似,2015—2018 年间,获得的总样本量为870 对,分布情况如表1 所示。从图1 中可以看到,所有被选样本的探空气球在上升过程中不断向风廓线雷达靠拢,当两站点之间的风场较为均匀,且在半小时内无较大变化时,样本的可信度较高。由于高层信噪比较低,无法获得可信的水平风场数据,因此,风廓线雷达的高层数据缺测较多。

图1 2018 年所选样本的探空气球飘移轨迹Fig 1 The air balloon’s trajectory of selected samples in 2018
1.2 数据选取
在取样空间问题得到解决的假设下,L 波段探空资料和风廓线雷达资料间仍存在以下不匹配问题:(1)两者观测时间无法严格对应,(2)两者观测高度无法严格对应。杭州探空站一般每日施放探空气球2 次,开始施放时间分别为北京时间7:15 和19:15(即北京时间8:00 和20:00 两个时次),若以上升速度为5 m·s-1估算,大约24 min 后可上升至7 200 m高度。而萧山站风廓线雷达的采样时间分辨率为6 min,最高采样高度为5 880 m。本文分别选取风廓线雷达在8:12,8:18,8:24,8:30,8:36;20:12,20:18,20:24,20:30,20:36 时的观测值(样本量如表1 所示),比较风廓线雷达5 次观测得到的平均风廓线和L 波段雷达每日2 次的探空廓线,以解决观测时间不对应问题。
另外,L 波段雷达探空原始秒级数据垂直分辨率约为6 m,而CFL-03 型风廓线雷达垂直分辨率在低层为60 m,在高层为120 m,前者远大于后者。为简便起见,在观测时,选取每层高度在3 m 内的最邻近的探空观测数据与之匹配,如果高度差大于3 m,则不做对比。数据统计表明,在所有的选择样本中,两者高度差大于3 m 的情况很少,不到0.1%。

表1 2015—2018 年所选样本的月分布Table 1 Samples monthly distribution from 2015 to 2018
图2 给出了2015 年1 月一次降温过程中风廓线雷达与L 波段雷达探空所测得的风速和风向及比较结果。降温过程前后24 h,风速和风向与时间和高度的关系分别如图2(a)和(d)所示,其中,虚线位置表示该时刻有探空观测; (b),(c),(e)和(f)分别为8:00 和20:00 风廓线雷达与L 波段雷达探空数据的对比情况,图中,红色实线为探空廓线,5 条蓝色虚线分别为8:12,8:18,8:24,8:30,8:36 和20:12,20:18,20:24,20:30,20:36 两个时段的风廓线雷达观测值。由图2(a)和(b)可知,就此次过程而言,无论是风速还是风向,2 种观测数据的一致性均较好。其中在0~2 km高度处,在00:00—13:00 时段始终存在一显著垂直切变风速,此特征在8:00 时,在2 种观测中都有较好体现,但风廓线雷达测得的最大风速层略高于L 波段雷达探空测得的。
2 结果分析
2.1 无降水条件下各高度对比
风廓线雷达是利用湍流大气对电磁波的散射作用进行测风的,在降水时,由于雷达回波信号受影响,其测风精度有所下降。为了使对比结果更可靠,笔者查询了萧山站2015—2018 年间870 对观测样本时段内地面自动站的分钟降水资料。查询得到,2015 年1 月28 日,8:12,8:18,8:24,8:30,8:36 和20:12,20:18,20:24,20:30,20:36 两个时段降水量不为0 的观测共有44 次。
使用相关系数、平均绝对偏差和均方根误差3个统计量表征风廓线雷达与L 波段雷达探空水平风场的对比结果,3 个统计量的表达式分别为:
相关系数(correlation coefficient):
其中,ViW表示风廓线雷达风场,ViR表示L 波段雷达探空风场。
考虑到风向的取值范围为0~360°,当一组观测的比对风向处于正北方向(360°)附近时,相关系数和均方根误差无法准确表示两者的差异,因此,需比较2 种观测的纬向风分量(u)和经向风分量(v)。在各高度层上,风廓线雷达与L 波段雷达探空u、v的相关系数、平均绝对偏差和均方根误差如图3 所示,图中蓝色点线表示无降水情况,红色点表示有降水情况。由图3 可知,当站点上空有降水时,3 个统计参数均无显著变化。
无降水条件下,高度在1~5.5 km 时,风廓线雷达与L 波段雷达探空的相关系数、平均绝对偏差和均方根误差随高度变化均无变化。其中,u分量的相关系数均超过0.9,v分量的相关系数基本维持在0.8~0.9;无论是u分量还是v分量,2 种探测的平均绝对偏差均在1 m·s-1左右,均方根误差为2 m·s-1。由于风廓线雷达和L 波段雷达在高层时观测距离较接近,因此,有理由推断高度在1~5.5 km 时,2 种风场的一致性较高。
而高度在0~1 km 时,风廓线雷达与L 波段雷达探空的相关系数、平均绝对偏差和均方根误差变化范围较大,特别是近地面层,u和v分量的相关系数均约0.5,均方根误差在2~8 m·s-1。已有研究显示[16],由于受局地环流等因素影响,近地层风的局地变化较大,即便探空气球施放点距风廓线雷达较近,L 波段雷达所测数据和风廓线雷达所测数据差异仍较大。而本文的2 种观测在低层时距离最大,因此,其结果的可信度较低。此外,高度在5.5 km 以上时,风廓线雷达与L 波段雷达探空间的均方根误差随高度升高缓慢增加,其原因可能与高层回波信号减弱和高层样本量减少有关。

图3 各高度层上风廓线雷达和L 波段探空u 和v 的相关系数、平均绝对偏差和均方根误差Fig.3 The correlation coefficients ,MAE,and RMSE of wind profiler radar’s latitude wind component(u)and longitude wind component(v)against L-band radar sounding at different levels
2.2 无降水条件下整层测量对比
使用散点图来表征整层高度范围内风廓线雷达和L 波段雷达探空的水平风场(见图4)。所选870对廓线中,减去降水条件下的44 对,剩余826 对风廓线,累计匹配样本量为27 885 对。总体来说,所有点较均匀地分布在y=kx直线两侧,无显著系统性偏差。其中整层高度上u的相关系数为0.93,平均绝对偏差为1.53 m·s-1,均方根误差为2.55 m·s-1,v的3 个 统 计 量 分 别 为0.80,1.65 和2.72 m·s-1,纬向风分量的一致性略好于经向风分量。
由2.1 节分析可知,高度在1 km 以下时,风廓线雷达和L 波段雷达探空其水平风场对比结果的可信度较低,本文重新评估了高度在1~5.5 km 时2 种观测数据(匹配样本量为20 000 对)的一致性情况。图4(c)和(d)显示,无论是u分量还是v分量,散点的集中程度明显高于图4(a)和(b)。计算可知,u和v分量的相关系数分别增至0.95 和0.87,而平均绝对偏差分别减至1.47 和1.52 m·s-1,均方根误差分别减至2.29 和2.12 m·s-1,一致性明显提高。
2.3 降水条件下整层测量对比
如2.1 节中所述,查询与本文风廓线雷达同址的地面自动站(萧山站)分钟降水资料,与有效样本对应时间段内有降水的观测廓线相当少。累加后有降水情况下整层高度的风廓线雷达与L 波段雷达探空匹配样本量为1 686 对,降水条件下两者的对比散点图如图5 所示,可见,即使站点上空有降水,散点依然较集中地分布在y=kx直线附近,其中u分量尤为明显。u和v分量的相关系数分别为0.98 和0.85,平均绝对偏差为1.39 和1.72 m·s-1,均方根误差为1.82 和2.40 m·s-1,这一结果与无降水情况相比也并无显著差别。考虑该样本所得统计结果具有一定可信度,有理由推断,降水对风廓线雷达探测数据的质量影响不大。
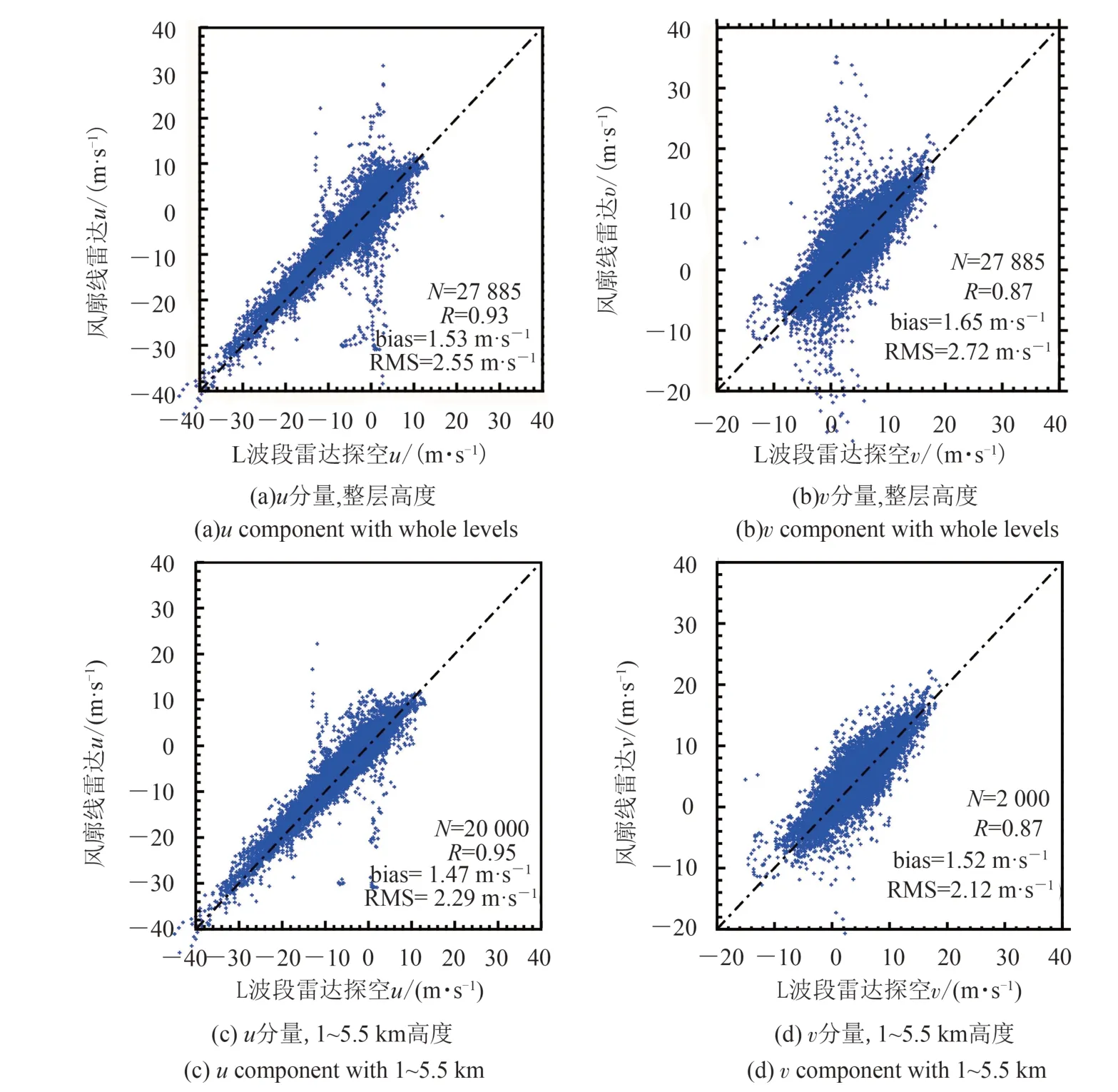
图4 无降水条件下风廓线雷达和L 波段雷达探空的水平风场散点图Fig.4 The scatter diagram of wind profiler radar’s u and v against L-band radar sounding with whole levels in non-precopitation condition

图5 降水条件下风廓线雷达和L 波段雷达探空的水平风场散点图Fig.5 The scatter diagram of wind profiler radar’s u and v against L-band radar sounding s with whole levels in precipitation condition
3 结论与讨论
利用2015—2018 年萧山站风廓线雷达资料和杭州站L 波段雷达探空资料,通过计算相关系数、平均绝对偏差和均方根误差3 个统计量,对2 种观测设备探测水平风场的一致性进行了评估。由于2 种观测设备非同源同址,且探空气球存在不定向水平漂移,本文特意将气球向风廓线雷达方向漂移的廓线作为对比样本,以期尽量增加评估结果的可信度。对870 对廓线的评估结果显示:
3.1 无降水条件下,高度在1 km 以下时,u和v分量的相关系数均约为0.5,均方根误差在2~8 m·s-1,考虑到近地层风的不稳定性和探空气球施放点距风廓线雷达较远,评估结果可信度较低。
3.2 无降水条件下,高度在1~5.5 km 时,风廓线雷达与L 波段雷达探空得到的水平风场两者较一致,且随高度变化差异不显著。2 种观测设备20 000 对匹配观测的u分量和v分量的相关系数分别为0.95和0.87,平均绝对偏差为1.47 和1.52 m·s-1,均方根误差为2.29 和2.12 m·s-1,两者较一致,且一致性好于整层高度。
3.3 对降水条件下整层高度的风廓线与探空匹配样本量进行累加,总共有611 对。统计结果与无降水条件下并无显著差异。
需要指出的是,以往研究中,在使用探空资料评估风廓线雷达风场可信度时往往时长较短,样本量较少,较多情况是科学试验获得的资料积累[1,14-15]。吴蕾等[17]对比分析了北京南郊大气探测基地2 种设备2006—2008 年共3 a 的水平风场一致性,所用设备分别为航天科工集团二十三所CFL-16 型风廓线雷达和国家探空站L 波段雷达,与本文选用的设备基本一致(第二十三研究所CFL-03 型),因而与本文结果具有一定可比性。其结果显示,在未剔除偏差较大的测风数据时,两者的标准差在4 m·s-1以上,而若以3 倍标准差作为误差限剔除野值后标准差约为2.3 m·s-1,此值接近本文的统计结果,这可能与本文样本选择方式有关。XU 等[19]给出了1 163条探空廓线水平飘移距离随高度变化的平均值,即气球上升到6 km 高度时约水平飘移8 km。可以推断,当L 波段雷达探空站与风廓线雷达同址时,近地面层风场的复杂性和高空采样空间的不一致会影响测风数据的可信度。而本文选择将气球飘向风廓线雷达方向的廓线作为样本,从而大大降低了高层采样空间不一致对测风数据的影响。
浙江省气象信息网络中心陈晴女士为本文提供了风廓线雷达资料和数据库信息,特此致谢!
猜你喜欢
环境技术(2022年1期)2022-03-21
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年3期)2021-11-22
气象与环境科学(2021年3期)2021-07-14
科技研究·理论版(2021年20期)2021-04-20
军民两用技术与产品(2019年7期)2019-07-26
飞天(2019年6期)2019-07-08
新高考·高二数学(2015年2期)2015-05-27
