
四面体式折展机械臂设计与分析
2020-10-10 07:07:58郭金伟许允斗张国兴姚建涛赵永生
农业机械学报 2020年9期
郭金伟 许允斗,2 张国兴 姚建涛,2 赵永生,2
(1.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004; 2.燕山大学先进锻压成形技术与科学教育部重点实验室, 秦皇岛 066004)
0 引言
空间折展机械臂已广泛应用在航空航天、工业和农业等领域,其主要作用是在有效支撑条件下实现远距离作业[1-9]。因此,折展机械臂通常需要具有大收拢率、轻质量和高刚度的特性[7]。
空间折展机械臂作为可展机构的一个重要分支,其相关技术在国内外已较为成熟。国外折展机械臂主要有薄壁管式折展机械臂[10]、伸缩筒式折展机械臂[11-13]、盘绕式折展机械臂[14-15]和铰接式折展机械臂[16-17]。与前几种折展机械臂相比,铰接式折展机械臂的展开刚度大、重复展开精度高,代表了空间折展机械臂的主流发展方向。比较典型的铰接式折展机械臂有AEC-Able工程公司为国际空间站太阳能面板开发的FAST折展机械臂和ADAM折展机械臂[15-17]。首尔大学[18]根据折纸思想,设计了一种自锁式折展机械臂机构,该机构精致小巧、质量轻、自锁后刚度大,在无人机的运载下能够到达人类难以到达的地方完成作业。
我国在折展机械臂的力学特性构建、制造机理以及在太空中的应用方面也取得了较大的进展。GUO等[19]研究了一种工业涂装机器人伸缩臂的拓扑原理。杨慧等[20]针对一种三棱柱伸展臂的超弹性铰链进行了力学建模与分析。单明贺[21]研制了一种三棱柱构架式可展机械臂,利用三根丝杠驱动收展,利用节点法推导了折展机械臂的刚度表达式,并分析了该折展机械臂的动力学、静力学特性。邓强[22]提出了锥形折展机械臂,进行了构型设计和驱动设计,分析了锥形折展机械臂的折展机理,并对其进行优化。文献[23]提出一种三棱柱可折展单元机构。文献[24]提出一种四棱柱型剪叉式空间折展机械臂,在分析折展机械臂工作原理的基础上,确定了剪叉折展单元的构型特征,基于螺旋理论求解了折展机械臂折展单元的自由度。文献[25]提出一种基于豆荚杆的三棱柱式可展开薄膜支撑臂形式,并进行了豆荚杆支撑臂建模和基于动力学模型的优化研究。
现有折展机械臂机构大多为一维折展机械臂,其末端姿态通常不能任意改变,在一定程度上限制了折展机械臂的空间作业范围。为了满足各类复杂空间作业的需求,实现一物多用,探索多维度、姿态可调和高刚度的空间折展机械臂机构成为一项重要研究议题。本文提出一种基于高刚度四面体单元机构的折展机械臂,对其构造方式和运动特性进行分析,对机构的折展特性和运动特性进行验证。
1 四面体单元及其组成的折展机构
1.1 单自由度四面体单元
一种R-RRR四面体折展机构的三维模型和机构简图如图1所示。该机构包括:2个完全相同的等边三角形折叠板ACD、BCD和1根同步折叠杆AB,同步折叠杆包括2根等长连杆和1个转动副。2个三角形折叠板由转动副连接,共用三角形折叠板的棱边CD,该转动副的转动轴线沿CD方向;同步折叠杆通过2个转动副分别与2个三角形折叠板连接,3个转动副的转动轴线均与CD方向平行。当同步折叠杆处于伸直状态,机构为完全展开状态,此时该单元机构为四面体结构。
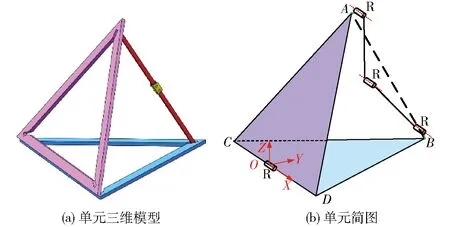
图1 R-RRR四面体单元Fig.1 R-RRR tetrahedral deployable unit
如图1所示四面体机构可视为两分支并联机构,定平台BCD、动平台ACD和分支1(R)、分支2(RRR),在分支1的转动副中心建立坐标系OXYZ,X轴沿CD方向,Z轴垂直定平台BCD向上方向。根据螺旋理论,两分支的运动螺旋表示为
(1)
(2)
式中yA——节点A的Y方向坐标分量
yB——节点B的Y方向坐标分量
zA——节点A的Z方向坐标分量
zB——节点B的Z方向坐标分量
分别对式(1)和式(2)中的运动螺旋求反螺旋,得到两分支的约束螺旋表示为
(3)
(4)
因此,R-RRR四面体机构中存在3个过约束,分别为沿Y、Z轴的约束力偶和沿X轴的约束力,不存在冗余约束和局部自由度,根据G-K公式可计算该机构的自由度数为

(5)
式中m——自由度数
d——阶数n——构件数
g——运动副数
fi——第i个运动副具有的单自由度数
1.2 基于四面体单元构造的两种折展机构
利用R-RRR四面体单元机构可拓展形成多种大型折展机构,如图2所示。图2a为基于四面体单元的折展机械臂机构,该机构整体呈螺旋状,是由多个四面体单元按照螺旋线方向依次拓展形成。图2b为基于四面体单元的桁架机构,该机构呈口径为六边形的柱状,是由多个四面体单元按照圆周方向依次拓展形成。这两种折展机构均可通过改变四面体单元大小及个数拓展形成不同尺寸的大型折展机构。
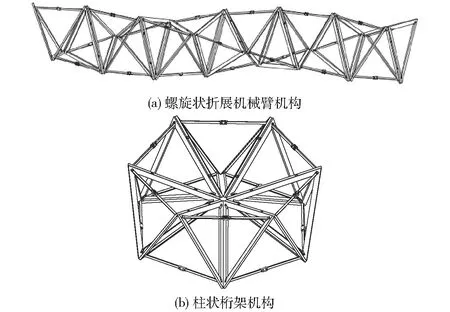
图2 基于四面体单元的折展机构Fig.2 Two deployable mechanisms based on tetrahedral unit
2 折展机械臂机构运动特性分析
基于四面体单元的折展机械臂机构由多个四面体单元按照一定排列方式连接而成,以图3所示2个四面体机构为例,该机构中包括四面体单元ABCD和四面体单元EACD,在四面体单元ABCD中,其自由度为1,选择同步折叠杆中间转动副为驱动副,折叠过程中机构始终满足
(6)
O1PA=[0lO1AcosαlO1Asinα]T
(7)
式中a——三角形折叠板边长
b——同步折叠杆中的连杆长度
θ——同步折叠杆中两连杆之间的角度,即随时间变化的驱动角
lO1A、lO1B、lAB——对应下标节点之间的长度
α——三角形折叠板ACD和BCD间的角度
将式(6)代入式(7),得到四面体单元折叠过程中末端节点A的位置随时间变化关系为
(8)

联立式(6)和式(8)可得节点A的速度为
(9)
动平台ACD姿态表示为
(10)

图3 2个四面体单元组合机构简图Fig.3 Schematic of combined mechanism based on two tetrahedral units
同理,在第2个四面体单元EACD中,可得到其末端节点E的位置O2PE和速度O2VE在坐标系O2X2Y2Z2下的表示。坐标系O2X2Y2Z2和坐标系O1X1Y1Z1之间的位置和姿态矩阵可表示为
(11)
因此,末端节点E的位置和动平台AED的姿态在坐标系O1X1Y1Z1表示为
(12)
基于上述分析,基于四面体单元构造的折展机械臂机构具有多自由度姿态可调性,根据四面体单元及其连接方式,折展机械臂机构自由度数Mn、各节点的位置O1Pn、各折叠板姿态O1Rn和速度O1Vn可以表示为
(13)
式中N1——四面体个数,N1≥1
3 折展机械臂机构仿真分析
3.1 运动仿真校验
基于ADAMS仿真分析软件建立1.1 m四面体折展机械臂机构的仿真模型,图4a为完全展开状态模型,该机构由7个四面体单元组成,因此该机构具有7个自由度。仿真分析时,将7个驱动添加到位于同步折叠杆中间的同步铰链处。在该机构中,通过控制驱动可实现同步折叠杆的折叠角变化,进而实现折展机械臂末端的姿态调节如图4b、4c所示。仿真得折展机械臂机构最终收拢状态如图4d所示。
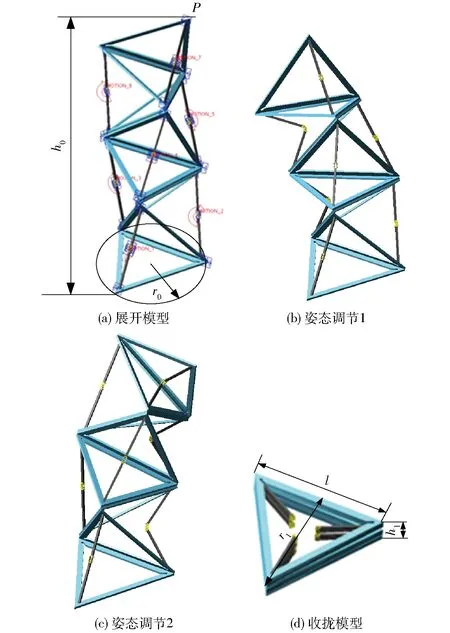
图4 1.1 m四面体折展机械臂Fig.4 1.1 m tetrahedral deployable mechanical arm
如图4所示,r0表示最底层三角形折叠板的外接圆半径,r0=0.21 m,l表示三角形折叠板棱边的长度,l=0.2 m,r1表示三角形折叠板中垂线长度,r1=0.35 m,h0表示折展机械臂完全展开时的高度,h0=0.55 m,h1表示折展机械臂完全收拢后的高度,h1=0.064 m,计算长度为1.1 m四面体折展机械臂的收拢率为
(14)
将折展机械臂机构的各驱动设置为18(°)/s,实现折展机械臂机构在5 s时收拢,测量末端节点P的位移和速度随时间变化曲线,其理论值和仿真值分别如图5所示。
由图5可知,折展机械臂机构末端节点在收拢过程中向固定机架靠拢,位移由初始的0.94 m逐渐减小到0.35 m,速度由初始的0.013 m/s逐渐增大到0.32 m/s。由于仿真模型为各构件的实体尺寸,理论值与仿真值存在一定误差,仿真结果验证了理论分析的正确性。
3.2 静力学分析
为了保证折展机械臂实现支撑及远距离作业等任务,折展机械臂应具有足够高的刚度及结构稳定性,选取4个四面体单元组合机构对其进行静力学分析。应用SolidWorks绘制机构的三维模型,导入到Workbench有限元仿真分析软件中,并进行材料属性、接触、网格划分及边界条件等设置,固定一端三角形折叠板,在末端三角形折叠板端面分别施加X、Y、Z方向的外力,大小为100 N。求解得到3个方向作用力下组合机构的变形量,如图6所示。
由图6可知,机构在外力作用下X、Y、Z方向的最大变形分别为5.973 3×10-5、1.007 7×10-4、4.026 8×10-5m,变形满足要求,机构具有较大刚度。
3.3 模态分析
折展机械臂机构的振动模态是机构设计的重要指标之一,选取4个四面体单元组合机构对其进行模态特性分析。当机构处于完全展开状态时,机构呈现结构态,因而分析完全展开状态时机构的模态。在Workbench中进行机构的模态分析,得到前6阶模态,其振型如图7所示。

图6 机构变形图Fig.6 Deformation of combined mechanism
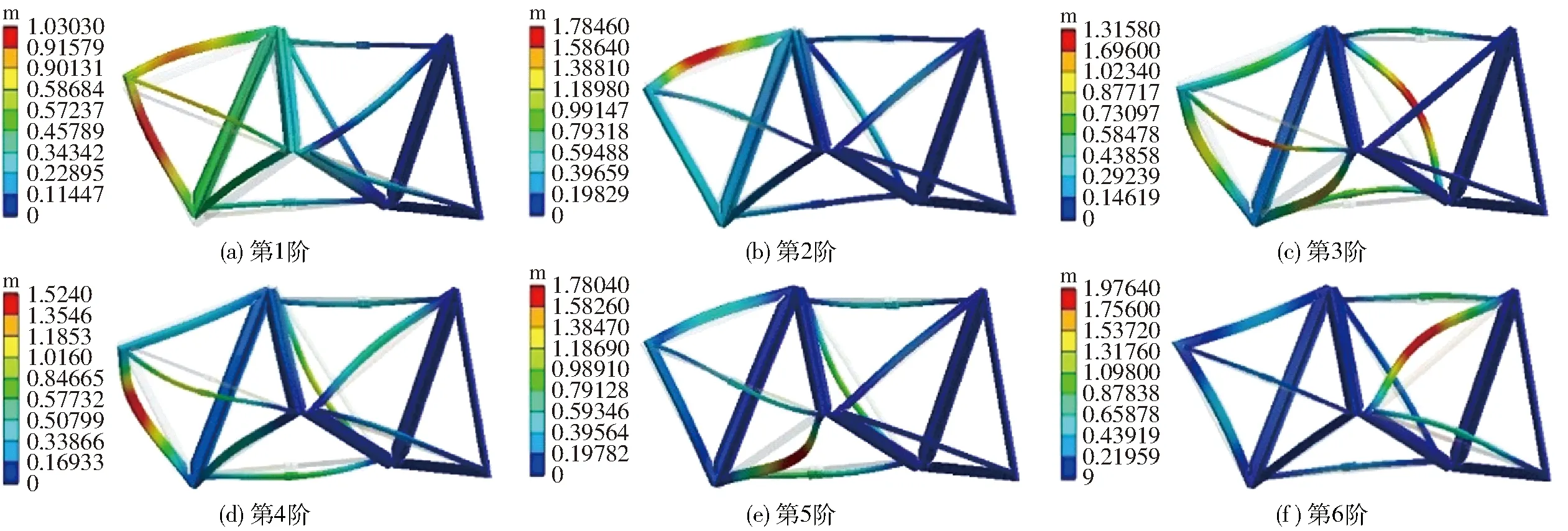
图7 前6阶模态振型图Fig.7 Mode shapes diagram of the first six modes
模态仿真分析表明,低阶模态下机构振型表现为整体振动,整体变形明显;随着模态增大,机构振型表现为局部振动,局部变形明显。
4 实验
加工和装配折展机械臂原理样机一台,并进行折展实验研究,如图8所示。
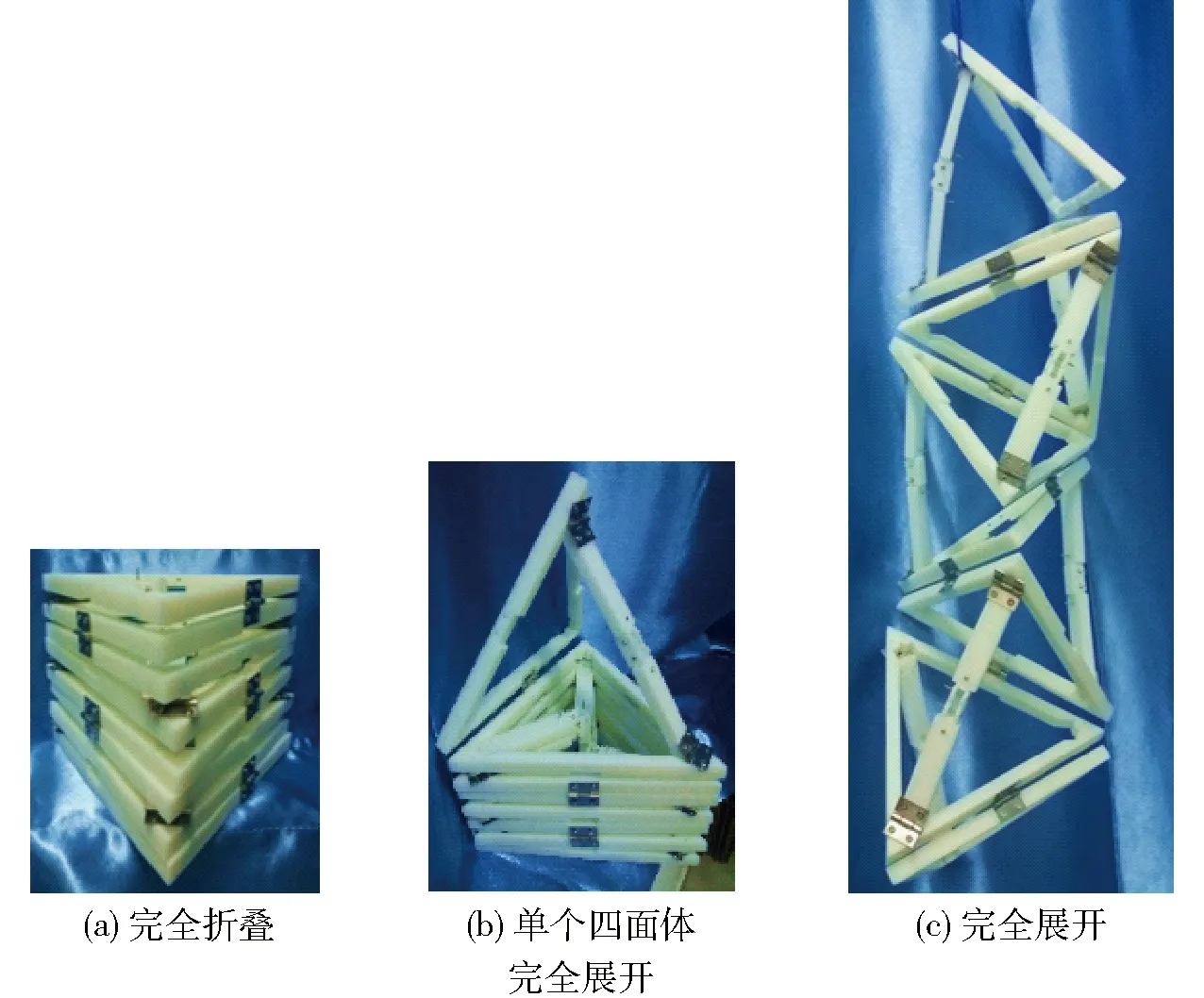
图8 原理样机Fig.8 Principle prototype
机构完全折叠状态如图8a所示。通过施加外力使第1个四面体单元展开,如图8b所示,同理,其他单元也能够逐级展开,通过控制同步折叠杆的折叠角度实现末端姿态调整。最后,采用悬挂法使样机在重力作用下完全展开,如图8c所示。实验结果验证了折展机械臂机构的折展性。
5 结论
(1)基于四面体单元采用不同的构造方式提出两种折展机构,基于螺旋理论分析了四面体单元机构的自由度,由多个四面体单元构造的折展机械臂的自由度数与单元数相同。
(2)分析得到由多个四面体单元组合的折展机构的自由度、各节点位置、速度及姿态的分布规律,并进行了仿真验证。
(3)通过实验验证了机构的折展性。与单一方向视为折展机械臂相比,本文提出的多自由度、大收拢率及姿态可调的折展机械臂具有明显优势。
猜你喜欢
科普童话·学霸日记(2023年7期)2023-08-21 09:49:46
数学物理学报(2021年4期)2021-08-30 08:27:52
数学物理学报(2021年2期)2021-06-09 08:54:24
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
上海电机学院学报(2015年4期)2015-02-28 14:30:00
计算物理(2014年2期)2014-03-11 17:01:39
影像科学与光化学(2014年1期)2014-03-11 16:02:43
